在芯片生產(chǎn)制造過(guò)程中,各工藝流程環(huán)環(huán)相扣,技術(shù)復(fù)雜,材料、環(huán)境、工藝參數(shù)等因素的微變常導(dǎo)致芯片產(chǎn)生缺陷,影響產(chǎn)品良率。芯片質(zhì)量檢測(cè)作為芯片生產(chǎn)線中的關(guān)鍵環(huán)節(jié),可以積極地反饋產(chǎn)品質(zhì)量信息,以便人們及時(shí)掌控各生產(chǎn)環(huán)節(jié)的健康狀況,促使質(zhì)量檢測(cè)技術(shù)在生產(chǎn)線中的作用越來(lái)越凸顯。
如今,人工目視檢測(cè)方法因其存在效率低、精度低、成本高、勞動(dòng)強(qiáng)度大和標(biāo)準(zhǔn)不統(tǒng)一等缺點(diǎn),正逐步被自動(dòng)檢測(cè)技術(shù)所取代。早期的自動(dòng)檢測(cè)技術(shù)主要圍繞機(jī)器視覺(jué)技術(shù)展開(kāi)。機(jī)器視覺(jué)技術(shù)以其高效率、高精度、高可靠性、非接觸性和客觀性強(qiáng)等優(yōu)點(diǎn),得到了廣泛研究和應(yīng)用 ,經(jīng)典方法為基于人工設(shè)計(jì)特征的特征選擇算法與模式識(shí)別分類算法的結(jié)合。近年來(lái),以卷積神經(jīng)網(wǎng)絡(luò)為代表的深度學(xué)習(xí)模型在計(jì)算機(jī)視覺(jué)領(lǐng)域的成功應(yīng)用,給缺陷檢測(cè)提供了新的發(fā)展方向 。 鑒于目前國(guó)內(nèi)還沒(méi)有全面細(xì)致論述半導(dǎo)體芯片表面缺陷檢測(cè)方法的綜述文獻(xiàn),本文通過(guò)對(duì) 2015—2021 年相關(guān)文獻(xiàn)進(jìn)行歸納梳理,旨在幫助研究人員快速和系統(tǒng)地了解該領(lǐng)域的相關(guān)方法與技術(shù)。本文主要回答了“芯片缺陷是什么”“芯片缺陷檢測(cè)做什么”和“芯片缺陷檢測(cè)怎么做”3 個(gè)問(wèn)題,相應(yīng)內(nèi)容包括介紹芯片制造流程及產(chǎn)生的相關(guān)缺陷和芯片缺陷檢測(cè)任務(wù),分析近幾年的相關(guān)研究方法和芯片表面缺陷特性,并進(jìn)行總結(jié)和歸納。
1 芯片生產(chǎn)及缺陷介紹 1.1 芯片制造流程
芯片生產(chǎn)需要經(jīng)歷數(shù)道工序,其中各工藝流程環(huán)環(huán)相扣。芯片生產(chǎn)對(duì)材料、環(huán)境、工藝參數(shù)等敏感,每個(gè)環(huán)節(jié)都有可能產(chǎn)生缺陷。因此,了解制造工藝流程,是進(jìn)行芯片表面缺陷檢測(cè)研究的前提。芯片生產(chǎn)線主要包括芯片設(shè)計(jì)、制造、封裝和檢測(cè) 4 大環(huán)節(jié),流程如圖 1 所示。

芯片檢測(cè)主要分為物理性檢測(cè)和電性能檢測(cè)。物理性檢測(cè)主要可分為封裝前的芯片表面缺陷檢測(cè)和封裝后的封裝體缺陷檢測(cè)。電性能檢測(cè)是在不同的電壓、溫度和濕度等條件下進(jìn)行溫度、電氣和速度測(cè)試,目的是檢測(cè)芯片的性能是否達(dá)標(biāo)。本研究主要聚焦于半導(dǎo)體芯片的物理性缺陷檢測(cè)。
1.2 芯片缺陷介紹
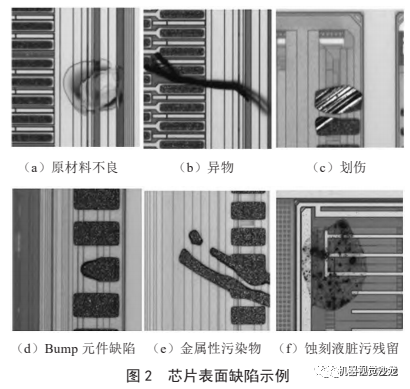
封裝前,上述數(shù)道工藝的操作控制、工藝參數(shù)、環(huán)境等因素都會(huì)對(duì)芯片質(zhì)量產(chǎn)生一定的影響,產(chǎn)生的缺陷表現(xiàn)出類別多樣、形態(tài)各異、背景復(fù)雜等特點(diǎn)。芯片制造過(guò)程中產(chǎn)生的表面缺陷示例如圖 2 所示,大致可劃分為原材料不良、異物、劃傷、Bump 元件缺陷(凸起、錯(cuò)位或缺失)、金屬性污染物和蝕刻液臟污殘留。此外,芯片制造過(guò)程中還會(huì)產(chǎn)生如蝕刻銹斑、電鍍過(guò)多、異色和金屬線損壞等小樣本缺陷。
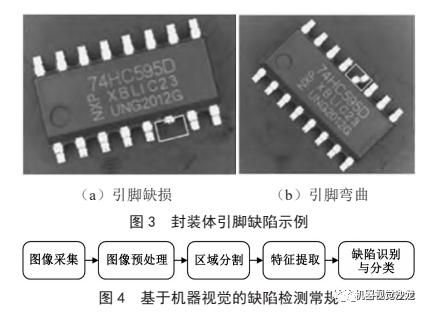
封裝后的封裝體缺陷包括印刷缺陷和引腳缺陷。封裝體表面印刷符號(hào)表明了其名稱、規(guī)格、型號(hào)和性能等信息,是辨識(shí)芯片的重要依據(jù)。清晰的符號(hào)是高質(zhì)量芯片的內(nèi)在需求。實(shí)際生產(chǎn)中常存在的印刷缺陷包括錯(cuò)字、偏移、漏印、多印、模糊、傾斜、位移、斷字、雙層印和無(wú)字等。引腳缺陷包括引腳缺失、引腳破損和引腳彎曲等。缺陷示例如圖 3 所示。
2 芯片缺陷檢測(cè)方法 2.1 機(jī)器視覺(jué)缺陷檢測(cè)方法
機(jī)器視覺(jué)方法基本檢測(cè)流程,如圖 4 所示。隨著機(jī)器視覺(jué)相關(guān)技術(shù)逐漸受到重視,多種基于人工設(shè)計(jì)特征的特征選擇算法和模式識(shí)別分類算法被應(yīng)用于表面缺陷檢測(cè)領(lǐng)域。
2.1.1 芯片表面缺陷檢測(cè)
針對(duì)封裝前的芯片表面缺陷檢測(cè),戴敬等通過(guò)改進(jìn)多重中值濾波算法,采用插影法、歸一化互相關(guān)的模板匹配等方法實(shí)現(xiàn)晶圓表面缺陷檢測(cè)。SU 等通過(guò)對(duì)封裝芯片的表面施加超聲波激發(fā)并結(jié)合測(cè)振儀提取了時(shí)域和頻域特征,引入遺傳算法進(jìn)行特征選擇,最后采用 BP(Back Propagation)神經(jīng)網(wǎng)絡(luò)進(jìn)行分類識(shí)別。陳凱提取集成電路芯片表面的幾何特征、紋理特征和灰度特征缺陷特征,在特征降維后輸入基于改進(jìn)的螢火蟲算法的支持向量機(jī)實(shí)現(xiàn)缺陷識(shí)別。付純鶴等提取芯片表面缺陷的 Hu 不變矩特征和局部二值模式(Local Binary Pattern,LBP)特征,通過(guò)反向傳播神經(jīng)網(wǎng)絡(luò)(Back Propagation Neural Network,BPNN)進(jìn)行學(xué)習(xí),最后采用最近鄰算法分類缺陷。
2.1.2 封裝體缺陷檢測(cè)
針對(duì)封裝后的封裝體存在的印刷缺陷,張靜平提出了一種動(dòng)態(tài)縮小圖像檢測(cè)區(qū)域的加權(quán)模板匹配算法,以判斷 QFN 芯片表面字符的缺陷。FABIO 等結(jié)合卷積神經(jīng)網(wǎng)絡(luò)、k 均值聚類算法和 k 近鄰分類算法,識(shí)別食品包裝盒上的符號(hào)模糊和符號(hào)缺失,對(duì)芯片封裝體存在的印刷缺陷檢測(cè)具有參考意義 。 針對(duì)封裝后的封裝體存在的引腳缺陷,巢淵提取缺陷的幾何、灰度、紋理特征,提出基于廣義反向粒子群與引力搜索混合算法和高斯核支持向量機(jī) RBFSVM 分類缺陷。劉琛等提出一種基于方位環(huán)境特征的點(diǎn)模式匹配定位算法,快速準(zhǔn)確定位芯片并識(shí)別引腳缺陷。
陳文鳳等設(shè)計(jì)了一套基于 ARM-DSP 雙核結(jié)構(gòu)的集成芯片引腳缺陷自動(dòng)檢測(cè)系統(tǒng)。 為檢測(cè) SOP 芯片引腳缺陷,李本紅等采用灰度躍變檢測(cè)引腳中點(diǎn)、中點(diǎn)直線擬合和引腳間距統(tǒng)計(jì)等方法,實(shí)現(xiàn)對(duì) SOP 芯片引腳缺陷的自動(dòng)檢測(cè) ;李繹鈴以連通像素區(qū)域標(biāo)記法為主要算法,提出基于模板匹配的引腳缺陷識(shí)別算法 ;金賀楠通過(guò)圖像矩來(lái)對(duì)SOP 芯片的整體位置進(jìn)行定位,同時(shí)結(jié)合基于 TwoPass 的連通域分方法來(lái)完善芯片引腳外觀檢測(cè) 。 以上特征提取結(jié)合分類器的方法可以較好地實(shí)現(xiàn)缺陷檢測(cè),但同時(shí)特征提取存在主觀性、局限性問(wèn)題和復(fù)雜化問(wèn)題等,需要依賴經(jīng)驗(yàn)和專業(yè)知識(shí),有針對(duì)性地依據(jù)產(chǎn)品表面缺陷特性提取和選擇特征。隨著芯片愈加集成化和光刻工藝愈加復(fù)雜,產(chǎn)生的缺陷往往類型繁多、特征復(fù)雜、背景多變和位置隨機(jī),傳統(tǒng)的機(jī)器視覺(jué)技術(shù)難以充分且有效地提取到缺陷特征,效率低下,已難堪重任。
2.2 深度學(xué)習(xí)缺陷檢測(cè)方法
近年來(lái),以卷積神經(jīng)網(wǎng)絡(luò)為代表的深度學(xué)習(xí)模型在計(jì)算機(jī)視覺(jué)領(lǐng)域成功應(yīng)用,給表面缺陷檢測(cè)帶來(lái)了新的啟發(fā)。不少學(xué)者將目標(biāo)檢測(cè)相關(guān)算法應(yīng)用于各種工業(yè)場(chǎng)景的表面缺陷檢測(cè)。 對(duì)缺陷模式認(rèn)知的不同,深度學(xué)習(xí)模型可以劃分為有監(jiān)督學(xué)習(xí)、無(wú)監(jiān)督學(xué)習(xí)和弱監(jiān)督半監(jiān)督等。有監(jiān)督檢測(cè)方法體現(xiàn)在利用標(biāo)記了標(biāo)簽(包括類別、矩形框或逐像素等)的缺陷圖像輸入到網(wǎng)絡(luò)中進(jìn)行訓(xùn)練,更關(guān)注缺陷特征。無(wú)監(jiān)督檢測(cè)方法通常只需要正常無(wú)缺陷樣本進(jìn)行網(wǎng)絡(luò)訓(xùn)練,更關(guān)注正常樣本特征。
2.2.1 有監(jiān)督方法
(1)芯片表面缺陷檢測(cè)。針對(duì)封裝前的芯片表面缺陷檢測(cè),周小萌將經(jīng)典的卷積神經(jīng)網(wǎng)絡(luò) Alexnet應(yīng)用于識(shí)別 IC 芯片外觀缺陷。李明將卷積神經(jīng)網(wǎng)絡(luò)和類激活映射技術(shù)相結(jié)合,提出 Laser Chip Net 網(wǎng)絡(luò)來(lái)實(shí)現(xiàn)激光芯片缺陷分類識(shí)別和缺陷區(qū)域定位。 DING 等引入多尺度金字塔網(wǎng)絡(luò)改進(jìn) Faster R-CNN的骨干卷積網(wǎng)絡(luò),用于檢測(cè) PCB 表面缺陷 。周天宇等提出了一種輕量級(jí)卷積神經(jīng)網(wǎng)絡(luò)算法 YOLOEfficientnet,應(yīng)用于載波芯片 COC 缺陷檢測(cè) 。CHEN 等將生成對(duì)抗網(wǎng)絡(luò) GAN 與 YOLOv3 算法結(jié)合,應(yīng)用于芯片晶粒的表面缺陷檢測(cè)。 對(duì) 于 LED 芯片的缺陷檢測(cè)問(wèn)題:LIN 等提出LEDNet,采用了一種類激活映射技術(shù)來(lái)定位 LED 芯片缺陷(線瑕疵和劃痕)區(qū)域 ;劉志提出了 ATSSD,采用深度殘差網(wǎng)絡(luò) ResNet 作為主干卷積網(wǎng)絡(luò),并引入注意力機(jī)制和多尺度特征融合方法提取特征,提升了檢測(cè)精度。 (2)封裝體缺陷檢測(cè)。針對(duì)封裝后的封裝體存在的印刷缺陷和引腳缺陷,唐銘豆等通過(guò)選定連通區(qū)域和分割算法定位字符,采用改進(jìn)的 CNN 進(jìn)行字符識(shí)別,最終實(shí)現(xiàn)芯片印刷標(biāo)識(shí)檢測(cè) 。郭曉峰等利用最小外接圓原理定位和校正圖像,隨后對(duì) ROI 區(qū)域進(jìn)行字符分割,最后進(jìn)行差分識(shí)別。肖磊基于 AlexNet改進(jìn)得到一種對(duì)壓敏電阻外觀細(xì)微缺陷敏感的卷積神經(jīng)網(wǎng)絡(luò)模型(CNN4VDR),用于識(shí)別壓敏電阻主體和針腳的外觀缺陷 。
2.2.2 無(wú)監(jiān)督方法
有監(jiān)督學(xué)習(xí)模型需要大量人工標(biāo)記數(shù)據(jù),但是在工業(yè)生產(chǎn)中,部分類型缺陷發(fā)生概率低,樣本數(shù)量少,小樣本訓(xùn)練網(wǎng)絡(luò)模型會(huì)導(dǎo)致過(guò)擬合問(wèn)題。此外,還經(jīng)常生成不可預(yù)知的缺陷,難以及時(shí)標(biāo)記。無(wú)監(jiān)督學(xué)習(xí)方法只需要正常無(wú)缺陷樣本進(jìn)行網(wǎng)絡(luò)訓(xùn)練,具備強(qiáng)大的正常樣本分布重建和判別能力,在近年逐漸受到關(guān)注。 CHANG 等提出了一種基于自組織神經(jīng)網(wǎng)絡(luò)(Self-Organizing Neural Networks,SONN)的晶圓自動(dòng)檢測(cè)系統(tǒng),利用 SONN 的無(wú)監(jiān)督自動(dòng)聚類的能力,識(shí)別晶圓上的缺陷區(qū)域 。GHOSH 等提出了一種基于 CNN 的有監(jiān)督技術(shù)和兩種基于深度圖和引腳紋理的無(wú)監(jiān)督技術(shù),以識(shí)別彎曲和腐蝕的芯片引腳缺陷 。羅月童等提出了基于卷積去噪自編碼器的芯片表面弱缺陷檢測(cè)方法。MEI 等提出了一種利用不同高斯金字塔等級(jí)的卷積去噪自編碼器網(wǎng)絡(luò)重構(gòu)圖像,使用重構(gòu)殘差圖進(jìn)行缺陷檢測(cè)。
2.3 其他方法
弱監(jiān)督的方法是指采用圖像級(jí)別類別標(biāo)注(弱標(biāo)簽)來(lái)獲取分割 / 定位級(jí)別的檢測(cè)效果。半監(jiān)督學(xué)習(xí)通常會(huì)使用大量的未標(biāo)記數(shù)據(jù)和少部分有標(biāo)簽的數(shù)據(jù),用于表面缺陷檢測(cè)模型的訓(xùn)練。相對(duì)于全監(jiān)督和無(wú)監(jiān)督方法,雖然目前弱監(jiān)督和半監(jiān)督方法在表面缺陷檢測(cè)中的應(yīng)用相對(duì)較少,但仍具有參考價(jià)值。 MARINO 等采用一種基于 PRM 弱監(jiān)督學(xué)習(xí)方法來(lái)對(duì)馬鈴薯表面缺陷進(jìn)行分類、定位和分割。ZHAO 等提出一種基于 GAN 的弱監(jiān)督學(xué)習(xí)缺陷檢測(cè)方法,通過(guò) CycleGAN 實(shí)現(xiàn)表面缺陷檢測(cè) 。YU 等提出了一種多重訓(xùn)練的半監(jiān)督學(xué)習(xí)方法應(yīng)用于鋼表面缺陷分類,利用 cDCGAN 和 ResNet-18 的多訓(xùn)練融合算法用于未標(biāo)記樣本的類別標(biāo)簽預(yù)測(cè)及訓(xùn)練。
此外,還有其他方法。例如 :萬(wàn)乃嘉設(shè)計(jì)了基于領(lǐng)域自適應(yīng)的芯片字符識(shí)別系統(tǒng) ;饒永明等提出了面向芯片表面符號(hào)的結(jié)構(gòu)缺陷的評(píng)估方法;主動(dòng)紅外熱成像技術(shù)被應(yīng)用于微焊球缺陷檢測(cè) 和倒裝芯片缺陷檢測(cè) ;空氣耦合超聲激勵(lì)應(yīng)用于倒裝芯片(Flip Chip,F(xiàn)C)缺陷檢測(cè) 。
3 芯片表面缺陷特性分析
當(dāng)前表面缺陷檢測(cè)中應(yīng)用的算法與通用目標(biāo)檢測(cè)算法異曲同工,即視表面缺陷為普通目標(biāo),忽視了表面缺陷與普通目標(biāo)之間的差異。下面將對(duì)比表面缺陷與普通目標(biāo),分析發(fā)現(xiàn)表面缺陷存在如下特性。
3.1 缺陷與缺陷之間的互斥性
在 目標(biāo)檢測(cè)中,同類或是異類目標(biāo)之間相互交疊的現(xiàn)象非常常見(jiàn)。如何檢測(cè)相互交疊的目標(biāo)是目標(biāo)檢測(cè)的重難點(diǎn)。如圖 5 所示,目標(biāo)檢測(cè)結(jié)果中“car”“person”“bicycle”目標(biāo)相互交疊。然而,表面缺陷之間相互交疊的情況并不存在,在某一個(gè)位置上有且只有一個(gè)缺陷。因此,缺陷檢測(cè)應(yīng)該有且只能有一個(gè)結(jié)果。如圖 5 所示,缺陷檢測(cè)結(jié)果中標(biāo)注框即是冗余結(jié)果。
3.2 缺陷與缺陷之間存在重要性差異
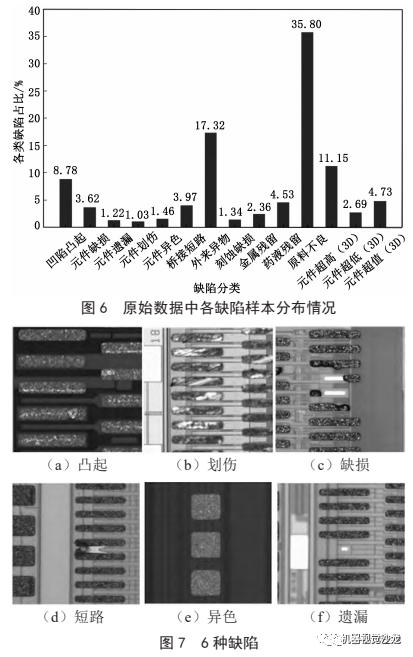
在通用目標(biāo)檢測(cè)中,所有目標(biāo)都是平等的,然而表面缺陷之間存在重要性差異。本研究通過(guò)電子顯微鏡采集了 25 種類別共 181 590 張半導(dǎo)體芯片表面缺陷圖像,通過(guò)數(shù)學(xué)統(tǒng)計(jì)方法分析發(fā)現(xiàn),其中 14 個(gè)類別缺陷樣本為主要成分,共 178 953 個(gè)樣本,占比 98.53%,樣本分布如圖 6 所示。各類缺陷樣本占比各不相同,意味著各類缺陷的發(fā)生概率各不相同,即存在著重要性差異,因此表面缺陷檢測(cè)應(yīng)合理考慮其差異性。

芯片表面的缺陷并不是孤立存在的,其產(chǎn)生必然會(huì)與周圍環(huán)境相互作用,存在關(guān)聯(lián)性。圖 7 展示的 6 種缺陷雖然特征完全不相同,但是存在一個(gè)共性,即均與Bump 元件相關(guān)。圖 7(a)是 Bump 元件上的局部凸起;圖 7(b)是 Bump 元件上的劃痕 ;圖 7(c)是 Bump 元件殘缺;圖 7(d)是金屬物質(zhì)異常滴漏在 Bump 元件之間,橋接引起短路;圖 7(e)是 Bump 元件局部表面顏色異常;圖 7(f)是 Bump 元件的漏焊,其具體形態(tài)特征可以參考周圍 Bump 元件。在分類任務(wù)中,Bump 元件可以幫助限定缺陷類別的范圍 ;在定位任務(wù)中,Bump 元件的位置可以輔助定位回歸。
雖然表面缺陷檢測(cè)技術(shù)已經(jīng)不斷從學(xué)術(shù)研究走向成熟的工業(yè)應(yīng)用,但是依然有一些需要解決的問(wèn)題。基于以上分析可以發(fā)現(xiàn),由于芯片表面缺陷的獨(dú)特性質(zhì),通用目標(biāo)檢測(cè)算法不適合直接應(yīng)用于芯片表面缺陷檢測(cè)任務(wù),需要提出新的解決方法。 4 結(jié)語(yǔ) 對(duì)近年來(lái)基于傳統(tǒng)的機(jī)器視覺(jué)和基于深度學(xué)習(xí)的芯片缺陷檢測(cè)方法進(jìn)行梳理與分析,介紹對(duì)封裝前的芯片表面缺陷和封裝體存在的印刷缺陷與引腳缺陷檢測(cè)的相關(guān)研究,詳細(xì)分析了芯片表面缺陷特性,以期為相關(guān)研究人員提供參考。
上一篇:S7-1200 PLC與V20變頻器Modbus通訊詳細(xì)指南
下一篇:三菱PLC入門電氣新手必知的基礎(chǔ)知識(shí)
推薦閱讀最新更新時(shí)間:2025-04-23 14:55
- 熱門資源推薦
- 熱門放大器推薦
 C++模板元編程實(shí)戰(zhàn) 一個(gè)深度學(xué)習(xí)框架的初步實(shí)現(xiàn)
C++模板元編程實(shí)戰(zhàn) 一個(gè)深度學(xué)習(xí)框架的初步實(shí)現(xiàn) 開(kāi)關(guān)電源EMI技術(shù)文檔
開(kāi)關(guān)電源EMI技術(shù)文檔
- 具有語(yǔ)音播報(bào)功能的超聲波液位測(cè)量系統(tǒng)設(shè)計(jì)
- 高精密光傳輸放大系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 多參數(shù)室內(nèi)環(huán)境智能監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
- 一種用于電熱蒸汽發(fā)生器的水位控制器設(shè)計(jì)
- 弱磁控制及其與磁極位置的關(guān)系分析
- 前饋控制在電梯驅(qū)動(dòng)系統(tǒng)中的作用分析
- DBF通道相位校正的工程實(shí)現(xiàn)方法
- 聯(lián)合收獲機(jī)凹板間隙調(diào)節(jié)系統(tǒng)研究
- 基于定時(shí)和同步時(shí)鐘卡的多機(jī)箱同步采集系統(tǒng)

- LT1377CS8 低紋波 5V 至 -3V Cuk 轉(zhuǎn)換器的典型應(yīng)用
- 使用 ROHM Semiconductor 的 BD10IA5WEFJ 的參考設(shè)計(jì)
- robomaster
- ADR445B 5 Vout 超低噪聲、LDO XFET 電壓基準(zhǔn)的典型應(yīng)用,帶電流吸收器和電流源
- 555控制LED燈閃爍
- KSZ8863MLL-EVAL,使用 KSZ8863MLL 的評(píng)估板 - 集成 3 端口 10/100 管理型交換機(jī)
- SIP78L08AC 三端低電流正壓穩(wěn)壓器典型應(yīng)用
- LTC3622EDE 5V/3.3V 串聯(lián)輸出、突發(fā)模式操作中的降壓穩(wěn)壓器的典型應(yīng)用電路
- 電賽神器:FPGA+STM32開(kāi)發(fā)板 copy
- ADA4610-1ARJZ-RL等效前置放大光電二極管電路典型應(yīng)用電路






- 福祿克測(cè)線儀之MPO測(cè)試工具
- Bolt擴(kuò)大汽車召回,難掩通用和LG化學(xué)間的愛(ài)恨情仇
- 雷達(dá)液位計(jì)有哪些特點(diǎn)和優(yōu)點(diǎn)
- 達(dá)摩院發(fā)布2022十大科技趨勢(shì):硅光芯片將突破摩爾定律限制
- 公司W(wǎng)iFi6研發(fā)團(tuán)隊(duì)是國(guó)內(nèi)最早從事射頻前端設(shè)計(jì)的資深人士
- 驅(qū)動(dòng)電機(jī)是新能源汽車產(chǎn)業(yè)鏈的重要環(huán)節(jié)
- 魏少軍:有人竭盡全力想將中國(guó)死死摁在價(jià)值鏈的最低端
- 大眾汽車宣布明年起其所有電動(dòng)車型全面轉(zhuǎn)向磷酸鐵鋰電池,升級(jí)至MEB Plus平臺(tái)
- 總產(chǎn)值破2000億,深圳要做“機(jī)器人第一城”?
- 鴻道Intewell操作系統(tǒng) 人形機(jī)器人底層操作系統(tǒng)
- 如何定位國(guó)產(chǎn)智駕芯片的終局價(jià)值?
- 新一代車規(guī)級(jí)數(shù)字功放電感VSAD-T系列 為汽車音響注入高保真基因
- 蜂巢能源快充電池突破:15分鐘充至滿電,提升30%效率
- 整車操作系統(tǒng)何以躋身智能汽車三大件?
- 人形機(jī)器人如何做到“手眼”協(xié)同+“大小腦”協(xié)同?
- 中國(guó)電池公司獲英國(guó)政府10億英鎊支持!
- 從游戲到智能駕駛,英偉達(dá)有哪些技術(shù)升級(jí)?
- 【直播】恩智浦Thread/BLE雙模技術(shù)講座
- 文曄科技有獎(jiǎng)直播:C2000在電機(jī)控制中的應(yīng)用 等你來(lái)看!
- 泰克70周年慶 了解新品 參與掀蓋有禮活動(dòng) 最多可獲得6次抽獎(jiǎng)機(jī)會(huì)
- 【EEWORLD第六屆社區(qū)明星人物】8月明星人物
- 直播已結(jié)束【使用 TI 低成本 MSPM0 MCU 快速開(kāi)發(fā) – 生態(tài)詳解系列之二】(9:45開(kāi)始入場(chǎng))
- 新春尋寶記,泰克送福利!快來(lái)開(kāi)啟你的尋寶之旅~
- 有獎(jiǎng)直播:借助Maxim的模擬技術(shù)優(yōu)化設(shè)計(jì)
- 有獎(jiǎng)評(píng)測(cè):50套來(lái)自恩智浦全新快速物聯(lián)網(wǎng)原型設(shè)計(jì)套件(價(jià)值350元)
- DEYISUPPORT TI 大咖級(jí)工程師在這里,等你來(lái)約!
- 自動(dòng)生成代碼工具使用教程(一) 開(kāi)發(fā)環(huán)境搭建
- 自動(dòng)生成代碼工具使用教程(二) FreeMaster調(diào)試
- 【飛思卡爾 MC9S12】BootLoader 下位機(jī)
- 【飛思卡爾 MC9S12】?jī)?nèi)部D-Flash模擬EEPROM
- 第六節(jié):STM32基于HAL庫(kù)的IIC通信
- 德賽西威攜手BlackBerry推一機(jī)雙屏虛擬智能座艙域控制器
- 激光雷達(dá)量產(chǎn)腳步再加快,國(guó)內(nèi)首條產(chǎn)線已落成
- CTEK推出新型便攜式電池充電器和維護(hù)器 搭載自適應(yīng)增強(qiáng)技術(shù)
- 韓國(guó)開(kāi)發(fā)無(wú)鈷正極材料 經(jīng)過(guò)500次循環(huán)保持83%的容量
- 自動(dòng)感應(yīng)雨刷的原理是什么?該如何設(shè)置?
- 電腦也能殺現(xiàn)實(shí)中滴真病毒,光觸媒真牛
- 基于RFID的預(yù)付費(fèi)電能表的研制
- 會(huì)STM32的大俠們幫幫忙,
- c語(yǔ)言專區(qū)(2)九九乘法表
- 電子工程里的好帖子在哪里!
- 身在上海的朋友們關(guān)注下,勞特巴赫邀請(qǐng)電子工程師們一起交流新品!
- msp430F149與實(shí)時(shí)時(shí)鐘(RTC)芯片DS1390的spi通信 讀取和接收數(shù)據(jù)不對(duì)
- 【求助】關(guān)于SD16在輸入通道短路后采樣數(shù)據(jù)不為零
- 如何測(cè)試單片機(jī)系統(tǒng)的可靠性
- 新手學(xué)習(xí)vxworks需要怎么入門







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)