背景
近年來(lái),主要競(jìng)爭(zhēng)對(duì)手在電梯控制技術(shù)上不斷地推出一些新的應(yīng)用技術(shù),并包裝成產(chǎn)品進(jìn)行銷(xiāo)售,既提高自身的品牌形象,也獲得了更大的市場(chǎng)份額。而我司在這技術(shù)創(chuàng)新方面也在緊密追趕。自從可變速電梯被推出到市場(chǎng)之后,其核心技術(shù)“弱磁控制”也進(jìn)入到我們的研究方向當(dāng)中。
弱磁控制技術(shù)的應(yīng)用,可以對(duì)電梯系統(tǒng)的規(guī)格擴(kuò)展帶來(lái)兩大好處,一是開(kāi)發(fā)周期大大縮短,二是控制系統(tǒng)成本不需要增加。但目前弱磁控制技術(shù)還未被廣泛應(yīng)用,其弱磁性能仍存在一些需要深入研究的地方,鑒于此,本文將介紹弱磁控制的基礎(chǔ)原理,以及實(shí)際調(diào)試過(guò)程中所發(fā)現(xiàn)的弱磁控制與磁極位置的關(guān)系分析,從而為真正廣泛將弱磁控制技術(shù)應(yīng)用到產(chǎn)品打下基礎(chǔ)。
1 弱磁控制介紹
1.1 弱磁原理
電動(dòng)機(jī)的轉(zhuǎn)速跟電機(jī)的端電壓成正比,當(dāng)電機(jī)的轉(zhuǎn)速增加時(shí),其感應(yīng)電動(dòng)勢(shì)也隨之增加,電機(jī)的端電壓就會(huì)增加。但由于電機(jī)供電電壓是由變頻控制器所決定的,對(duì)于超過(guò)變頻控制器的母線電壓限制的,電機(jī)將得不到所需求的電壓以及轉(zhuǎn)速。
在變頻器以及電機(jī)都不變的情況下,電機(jī)的轉(zhuǎn)速想要超過(guò)其額定轉(zhuǎn)速,就需要引入弱磁控制的概念。要使電機(jī)能夠正常運(yùn)行,電機(jī)的感應(yīng)電勢(shì)就不能超過(guò)其供電電源的電壓(此處即變頻器),而電機(jī)的感應(yīng)電勢(shì)等于電機(jī)轉(zhuǎn)速與電機(jī)內(nèi)部磁通的乘積。想要保持感應(yīng)電勢(shì)不變,且需要提升電機(jī)轉(zhuǎn)速的話,就必須使電機(jī)內(nèi)部磁通減弱,這就是弱磁控制的基礎(chǔ)原理。
對(duì)于目前被廣泛應(yīng)用的永磁同步電機(jī)PMSM而言,其弱磁控制的方法源于他勵(lì)直流電機(jī)的勵(lì)磁原理。當(dāng)他勵(lì)直流電機(jī)的轉(zhuǎn)速超過(guò)其額定轉(zhuǎn)速時(shí),只要將其勵(lì)磁電流減少,就能降低其勵(lì)磁磁通,從而可以在保持電機(jī)電壓不變的情況下提高轉(zhuǎn)速。而對(duì)于永磁同步電機(jī)而言,其勵(lì)磁磁通是由永磁鐵提供的,不能自由調(diào)節(jié),只能通過(guò)調(diào)節(jié)定子電流,根據(jù)矢量控制原理及PARK坐標(biāo)變換原理,通過(guò)增加定子直軸電流達(dá)到削弱磁場(chǎng)的效果,從而實(shí)現(xiàn)弱磁升速目的。
基于電動(dòng)機(jī)的原理及其實(shí)際設(shè)計(jì)情況(例如溫升限制),電機(jī)的功率需要守恒,而電機(jī)的功率等于轉(zhuǎn)速與輸出力矩的乘積,因此,當(dāng)電機(jī)通過(guò)弱磁控制使速度提升超過(guò)其額定轉(zhuǎn)速時(shí),電機(jī)的輸出力矩就必須減少,從而達(dá)到恒功率弱磁升速的效果。
1.2 電機(jī)的電壓平衡方程
對(duì)于永磁同步電機(jī),其電壓平衡方程如下:
將電壓平衡方程轉(zhuǎn)化成dq坐標(biāo)系的矢量圖如下:
根據(jù)圖1與圖2的對(duì)比,可以很直觀地看到,電機(jī)端電壓U1(無(wú)弱磁時(shí))與U2(弱磁時(shí))相比,U2明顯下降,達(dá)到弱磁恒速降壓的效果,而在此基礎(chǔ)上,我們?cè)偬岣咂潆姍C(jī)轉(zhuǎn)速指令值,使電機(jī)端電壓回升到額定值,此時(shí)就可得到弱磁恒壓升速的效果。

2 弱磁控制與磁極位置的關(guān)系分析
本文引用地址:https://www.eepw.com.cn/article/266054.htm
2.1 磁極的相關(guān)概念
轉(zhuǎn)子磁極(N極)的位置,稱(chēng)為磁極位置。
轉(zhuǎn)子磁極(N極)與定子線圈α基準(zhǔn)軸的夾角,稱(chēng)為磁極角。
在αβ基準(zhǔn)坐標(biāo)系中,基于電機(jī)編碼器Z相脈沖ON上升沿時(shí)的轉(zhuǎn)子磁極位置的角度,稱(chēng)為磁極碼。(磁極碼的定義基于不同的控制方式會(huì)有所差異)
2.2 弱磁控制與磁極位置的關(guān)系
電機(jī)磁極碼的正確與否,會(huì)直接影響控制系統(tǒng)對(duì)電機(jī)磁極位置的確認(rèn),從而影響弱磁控制的實(shí)際效果,因此,我們需要研究其相互關(guān)系,并加以利用。
由于工程應(yīng)用現(xiàn)場(chǎng)的電機(jī)磁極碼自學(xué)習(xí)存在一定的誤差,這使得磁極碼將出現(xiàn)三種情況:
一是磁極碼反映的角度剛好正確,控制系統(tǒng)能正確認(rèn)知電機(jī)磁極位置;
二是磁極碼反映的角度比電機(jī)實(shí)際磁極位置超前;
三是磁極碼反映的角度比電機(jī)實(shí)際磁極位置滯后;
下面將會(huì)對(duì)上述三種情況進(jìn)行詳細(xì)的分析。
情況一:磁極碼反映的角度剛好正確。
從圖3可知,在dq坐標(biāo)系中,電機(jī)相電流Im1、Im2、Im3的幅值是相等的,圖3中的圓可認(rèn)為是基于功率守恒(電機(jī)功率公式見(jiàn)式4)的電流等幅圓。Id*與Iq*分別是電機(jī)d軸、q軸的電流指令給定值。Im與Id*、Iq*的關(guān)系如式5。Iq*完全等于力矩電流Itrq。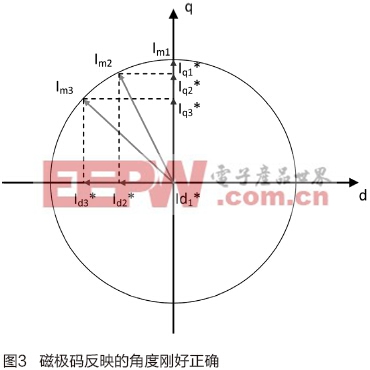
以11kw額定電流為25A的電機(jī)為例:
①當(dāng)Id1*=0時(shí),Iq1*=25A額定值,此時(shí)電機(jī)的輸出力矩也是額定力矩;
②當(dāng)Id2*=-10A時(shí),Iq2*≈23A,加入了Id2*之后,為了使Im2的幅值不變,則與Iq1*相比,Iq2*要變小。
③當(dāng)Id2*=-15A時(shí),Iq2*=20A,加入了更大的Id3*之后,為了使Im3的幅值不變,則與Iq2*相比,Iq3*要變得更小。
另外,如果加入了Id*之后,電機(jī)的負(fù)載力矩不變的話,Iq*則不能變小,則會(huì)導(dǎo)致Im增大,從而導(dǎo)致輸出功率不守恒,電機(jī)過(guò)負(fù)荷運(yùn)作。
情況二:磁極碼反映的角度比電機(jī)實(shí)際磁極位置超前。
如圖4所示,由于磁極碼不正確,此時(shí)的Iq*、Id*與Itrq的關(guān)系如式6。
![]()
上一篇:前饋控制在電梯驅(qū)動(dòng)系統(tǒng)中的作用分析
下一篇:最后一頁(yè)
- 熱門(mén)資源推薦
- 熱門(mén)放大器推薦
 開(kāi)關(guān)電源EMI技術(shù)文檔
開(kāi)關(guān)電源EMI技術(shù)文檔 LM139FH
LM139FH
- 具有語(yǔ)音播報(bào)功能的超聲波液位測(cè)量系統(tǒng)設(shè)計(jì)
- 高精密光傳輸放大系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 多參數(shù)室內(nèi)環(huán)境智能監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
- 一種用于電熱蒸汽發(fā)生器的水位控制器設(shè)計(jì)
- 弱磁控制及其與磁極位置的關(guān)系分析
- 前饋控制在電梯驅(qū)動(dòng)系統(tǒng)中的作用分析
- DBF通道相位校正的工程實(shí)現(xiàn)方法
- 聯(lián)合收獲機(jī)凹板間隙調(diào)節(jié)系統(tǒng)研究
- 基于定時(shí)和同步時(shí)鐘卡的多機(jī)箱同步采集系統(tǒng)

- 【武漢理工大學(xué)校賽】電子設(shè)計(jì)競(jìng)賽
- AD1583 2.5V 至 5.0V 微功率、精密串聯(lián)模式電壓基準(zhǔn)的典型應(yīng)用電路
- LTC3214EDD 演示板,低噪聲、高電流 LED 閃光燈充電泵,Vin = 2.9V - 4.4V
- 使用基于 ZICM3588SP0-1-R Ember EM35x 收發(fā)器模塊的 Mesh Connect EM35x 迷你模塊的典型應(yīng)用電路
- FEBFCM8531_B01H300A,用于 FCM8531 SOC 應(yīng)用處理器的 PMSM/BLDC 電機(jī)控制評(píng)估板
- 使用 Microchip Technology 的 TCL1584 的參考設(shè)計(jì)
- LTC3632EMS8E 高效 5V 穩(wěn)壓器的典型應(yīng)用電路
- TCR5SB25A、150mA、2.5V 輸出電壓 CMOS 低壓降穩(wěn)壓器的典型應(yīng)用
- LT1072HVIT 負(fù)降壓轉(zhuǎn)換器的典型應(yīng)用
- 雙子座 ELRS 高頻頭 Genimi 高頻頭 (使用ESP32模塊)






- 工業(yè)4.0時(shí)代,PLC需要更纖薄更低耗的繼電器
- 51單片機(jī)-詳細(xì)理解ASCII碼
- 【STM32】HAL庫(kù)調(diào)用HAL_SPI_Transmit出現(xiàn)HartFault問(wèn)題
- Silicon Labs成立了專(zhuān)門(mén)小組,研究全球半導(dǎo)體供應(yīng)鏈短缺
- STM8 點(diǎn)亮第一個(gè)發(fā)光二極管
- STM32入門(mén)學(xué)習(xí)之USART(STM32F030F4P6基于CooCox IDE)
- ARM的Nand Flash入門(mén)使用手冊(cè)(以K9F2G08X0M為例)
- 【C51自學(xué)筆記】獨(dú)立鍵盤(pán)+矩陣鍵盤(pán)
- 大眾汽車(chē)宣布明年起其所有電動(dòng)車(chē)型全面轉(zhuǎn)向磷酸鐵鋰電池,升級(jí)至MEB Plus平臺(tái)
- 總產(chǎn)值破2000億,深圳要做“機(jī)器人第一城”?
- 鴻道Intewell操作系統(tǒng) 人形機(jī)器人底層操作系統(tǒng)
- 如何定位國(guó)產(chǎn)智駕芯片的終局價(jià)值?
- 新一代車(chē)規(guī)級(jí)數(shù)字功放電感VSAD-T系列 為汽車(chē)音響注入高保真基因
- 蜂巢能源快充電池突破:15分鐘充至滿電,提升30%效率
- 整車(chē)操作系統(tǒng)何以躋身智能汽車(chē)三大件?
- 人形機(jī)器人如何做到“手眼”協(xié)同+“大小腦”協(xié)同?
- 中國(guó)電池公司獲英國(guó)政府10億英鎊支持!
- 從游戲到智能駕駛,英偉達(dá)有哪些技術(shù)升級(jí)?
- 半導(dǎo)體產(chǎn)業(yè)的故事:臺(tái)灣半導(dǎo)體行業(yè)是如何起飛的
- 上海交通大學(xué)實(shí)現(xiàn)世界最大規(guī)模光量子計(jì)算芯片
- 邊緣運(yùn)算將成主流 仍面臨運(yùn)算能耗、存儲(chǔ)器頻寬等挑戰(zhàn)
- NVIDIA汽車(chē)業(yè)務(wù)仍在播種階段 自駕技術(shù)市場(chǎng)機(jī)會(huì)龐大
- 美國(guó)法官裁定三星禁令失效的原因竟是這樣!華為該如何選擇?
- 滿意就會(huì)推出 趙明表示將發(fā)榮耀Magic 2
- 小鵬汽車(chē)劉明輝:電芯技術(shù)是整車(chē)廠取得競(jìng)爭(zhēng)力的關(guān)鍵
- 首部移動(dòng)電源國(guó)家標(biāo)準(zhǔn)正式發(fā)布:2018年7月1日實(shí)施
- vivo 冠名羅振宇跨年演講20年,第二年演講昨晚開(kāi)講
- 聞泰張學(xué)政:公司進(jìn)入二次創(chuàng)業(yè),迎接未來(lái)黃金十年







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)