背景
近年來,變頻技術以及自動控制技術均已在電梯行業中得到了廣泛的應用,而且越來越多的高端客戶對電梯運行的性能要求也越來越高,因此,行業內處于領先水平的電梯企業都在電梯控制技術上不斷地推出一些新的應用技術,并結合相應的產品推向市場。本文將介紹前饋控制技術的基礎原理,以及對前饋控制在電梯驅動系統中的作用進行分析,并提出適合電梯運動的前饋系統。
1 前饋控制介紹
1.1 前饋控制原理
反饋控制是將系統運行的實際與指令進行相減,并將此偏差量作為輸入條件對被控對象進行控制的技術。它是在系統已經發生了偏差的情況下發揮調節作用,因此,也不可避免地使系統響應速度變慢,從而產生超調現象。
前饋控制(Feed Forward Control)的定義是:將被控變量的一個或多個影響條件的信息轉換成反饋回路外的附加作用的控制。前饋控制是通過觀察情況、收集整理信息、掌握規律、預測趨勢,正確預計未來可能出現的問題,提前采取措施,將可能發生的偏差消除在萌芽狀態中,為避免在未來不同發展階段可能出現的問題而事先采取的措施。
將前饋控制技術與反饋控制技術結合使用,能夠提高系統的響應速度,減小速度偏差以及超調現象,同時即使前饋指令略有不準確時,亦能通過反饋控制技術進行閉環調節,提高系統穩定性與準確性。
1.2 電梯系統分析
電梯是服務于建筑物中的運輸設備,為了能滿足這一特定工作條件的需要,電梯必須具有相應的性能要求。電梯需要保證其自身的安全性、可靠性、快捷性以及舒適性。
電梯系統是一個非常復雜的機械、電氣一體化系統,機械部分相當于人的軀體,電氣部分相當于人的中樞神經,機械與電氣兩方面的高度結合,形成了現代科學的綜合電梯產品。電梯系統的結構主要包括電梯曳引主機、轎廂、鋼絲繩、對重、補償裝置、控制柜、安全裝置等,如圖1所示。電梯控制柜對曳引主機進行變頻控制,主機通過曳引鋼絲繩使得被其懸掛的轎廂與對重在電梯井道內進行上下運行,從而達到人員運輸的目的。
電梯系統屬于一種大慣量系統,而電梯變頻驅動器幾乎全部都是采用反饋控制的方法來驅動電梯運行的,其結果往往會使得電梯運行時發生速度超調的現象,如圖2所示。
為了提高系統響應速度并抑制這種速度超調現象,我們可以采用增加前饋控制環節的方式,如圖3所示。系統對速度指令進行微分,得到加速度指令,然后利用加速度指令作為前饋控制的參量,再將其放大到與力矩指令等同的量綱,最后直接外加到原力矩指令中。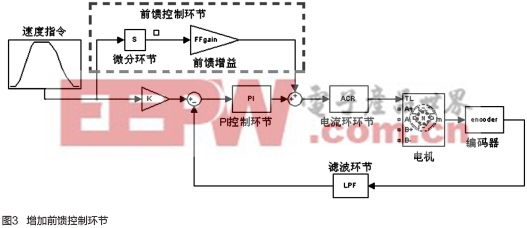
增加了前饋控制環節的速度曲線,系統超調現象明顯減小,系統的響應性能明顯得到提高,如圖4所示。
本文引用地址:https://www.eepw.com.cn/article/267431.htm
1.3 前饋控制參數分析
前饋控制中有兩個重要的參數,一是加速度指令,二是前饋增益的放大倍率,兩者相乘就可以得到前饋力矩指令,如公式(1)所示。下面對這兩個參數的影響進行分析。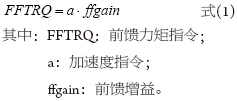
1.3.1 加速度指令
將電梯的速度指令進行微分,就可以得到加速度指令。至于為什么要用加速度而不用速度,可以根據公式(2)得出其原因,當電梯載重不變時,電梯加速度跟力成正比,在主機繩輪直徑不變的前提下,電梯加速度指令跟力矩指令成正比。因此,加速度的大小可以直接反映力矩的大小。
![]()
加速度指令前饋相當于力矩指令前饋,而系統的力矩指令能直接控制變頻器的輸出電流值,這樣就有助于直接控制電機的穩定運行。
1.3.2 前饋增益
前饋增益是一個放大倍數,它將加速度放大,并使之變成力矩指令。由于電梯在勻速段時加速度為零,前饋力矩也為零,而在加減速段,前饋力矩的值必須要與真實需求的輸出力矩相同,這樣才能發揮出前饋控制在電梯運行中的性能優勢。
加減速時的輸出力矩大小與電梯系統慣量有直接關系,而每一臺電梯的系統慣量都不一樣。其系統慣量會受到包括提升高度、裝飾重量、補償率、電梯負載、旋轉部件轉動慣量等因素的影響。因此,我們必須通過對電梯系統慣量的自學習,來推算出真實需求的前饋增益,這種自學習的方式在不同的控制系統可以有不同的方法。
本系統的自學習功能,是自動計算系統減速運行與勻速運行時力矩指令之間的差值,并且由于電梯在0%負載與100%負載時的系統有效慣量差別大,因此,我們需要分別學習其在0%負載與100%負載時的力矩差值,以便系統自動計算其在不同負載下的力矩增益值。如圖5所示。
我們分析了前饋增益的大小對系統的影響,進一步求證了前饋增益準確的重要性。增益太小,系統對速度超調的抑制能力會減弱;增益太大,系統的速度曲線會發生較大的畸變。如圖6所示。
本文引用地址:https://www.eepw.com.cn/article/267431.htm
前饋放大倍率的理論偏差由以下幾部分組成(如圖7所示):
(1)稱重偏差;
(2)上、下行得出的gain平均值偏差;
(3)力矩脈動造成的誤差;
(4)電機冷態熱態的力矩電流偏差。
詳細分析如下:
(1)稱重偏差,由于系統的稱重偏差設計值為±10%,可推導得出由此造成的gain偏差如式(3)所示。
![]()
(2)上下行gain平均值偏差,根據系統計算可得出以下力矩的理論值如圖8所示,計算如公式(4)和(5)所示。

(3)力矩脈動造成的誤差,由于電機的實際輸出力矩是有脈動的,且該脈動造成的誤差無法從理論上計算。通過塔上試驗多次自學習取得偏差量數據,如表1~表4所示。
本文引用地址:https://www.eepw.com.cn/article/267431.htm
由上述測試結果可得,無論是否有預設前饋gain,其測試結果的偏差基本相同。力矩脈動造成的gain最大誤差率為3.23%。計算如式(7)所示。
![]()
(4)電機冷態熱態的力矩電流偏差,由電機的型式試驗結果可知,熱態時的電機力矩電流比冷態時大3%,因此相當于gain的偏差為3%。
綜上所述,前饋放大倍率的理論總偏差計算如式(8)所示。

經過對前饋力矩增益gain的再次仿真與實測,其最大理論總偏差(約10%)不會對系統的運行穩定性造成影響,系統性能亦能達到開發的指標要求。
2 總結
本文從理論上分析了前饋控制的原理及其應用的方法,結合電梯的實際情況,分析了前饋控制與電梯運行性能的關系。并且分析了前饋控制理論中的兩個關鍵參數(加速度指令、前饋增益)的設計計算方法,同時研究了前饋增益的理論偏差,并通過仿真與實測驗證了其在應用過程中的系統穩定性。
在控制系統中增加加速度前饋力矩控制環節,能有效地抑制速度超調的問題;速度超調得到抑制,相當于電梯速度的跟隨性得到提高,可控性也提高;可控性的提高,使得電梯的速度指令與實際速度更為相符。電梯系統采用反饋及前饋控制技術相結合,為實現電梯運行的精確控制提供了基礎,也為實現提高電梯運行舒適性提供了深入研究的方向。
參考文獻:
[1]孫炳達.《自動控制原理(第3版)》[M].機械工業出版社,2012
[2]洪乃剛.《電力電子、電機控制系統的建模和仿真》[M].機械工業出版社,2012
[3]周揚忠,胡育文. 《交流電動機直接轉矩控制》[M].機械工業出版社,2010
[4]王兆安,張明勛.《電力電子設備設計和應用手冊(第3版)》[M] .機械工業出版社,2009
上一篇:DBF通道相位校正的工程實現方法
下一篇:弱磁控制及其與磁極位置的關系分析
 變頻器技術應用 姚錫祿
變頻器技術應用 姚錫祿 半導體二極管及其應用
半導體二極管及其應用

- FAN6224同步整流控制器正激續流整流典型應用
- LTC3621EMS8E-2 1.2Vout、同步至 600kHz、強制連續模式同步降壓型穩壓器的典型應用
- MC34071ADR2G快速建立逆變器的典型應用
- LT3970EMS-3.3 5V 降壓轉換器的典型應用
- LT1171HVIT、2.5A 高效恒流充電器的典型應用
- 具有輕負載效率的 NCP5252 2.0 A、1.0 MHz 集成同步降壓穩壓器的典型應用
- DC124,使用 LTC1416 高速 14 位、400Ksps 模數轉換器的演示板
- AD8618ARZ-REEL單電源緩沖DAC輸出運算放大器典型應用電路
- 使用 MaxLinear, Inc 的 SPX385AS-1.2/TR 的參考設計
- 使用 NXP Semiconductors 的 MC34SB0410AE 的參考設計













 京公網安備 11010802033920號
京公網安備 11010802033920號