關鍵詞:android camera CMM 模組 camera參數 CAMIF V4L2
平臺信息:
內核:linux
系統:android
平臺:S5PV310(samsung exynos 4210)
作者:xubin341719(歡迎轉載,請注明作者)
http://blog.csdn.net/xubin341719/article/details/7727426
android camera(一):camera模組CMM介紹
android camera(二):攝像頭工作原理、s5PV310 攝像頭接口(CAMIF)
android camera(三):camera V4L2 FIMC
android camera(四):camera 驅動 GT2005
下載:常用攝像頭規格書(個別有android驅動程序) :bf3703 30W、gc0308 30W、ov7670、gt2005 200W、gt2015 200W、NT99250 200W、s5k5ba 200W、s5k4ba
前面兩篇說的有點多了,不過多了解點東西也挺好的,遇到問題時可以有更多的思路,真正驅動是從這一塊開始。一般BSP的camera都是完好的,我們只用關心驅動這些就可以了。
1. V4L2
1)簡介
在Linux中,攝像頭方面的標準化程度比較高,這個標準就是V4L2驅動程序,這也是業界比較公認的方式。
V4L全稱是Video for Linux,是Linux內核中標準的關于視頻驅動程序,目前使用比較多的版本是Video for Linux 2,簡稱V4L2。它為Linux下的視頻驅動提供了統一的接口,使得應用程序可以使用統一的API操作不同的視頻設備。從內核空間到用戶空間,主要的數據流和控制類均由V4L2驅動程序的框架來定義。
V4L2驅動程序一般只提供Video數據的獲得,而如何實現視頻預覽,如何向上層發送數據,如何把純視頻流和取景器、視頻錄制等實際業務組織起來,都是camera的硬件抽象層需要負責的工作。
V4L2驅動核心實現為如下文件:drivers/media/video/v4l2-dev.c。
V4l2-dev.h中定義的video_device是V4L2驅動程序的核心數據結構,它為具體的攝像頭sensor驅動提供了接口調用。
V4l2的采集過程(應用程序):
1) 打開設備,獲得文件描述符;
2) 設置圖片格式;
3) 分配緩沖區;
4) 啟動采集過程,讀取數據;
5) 停止采集,關閉設備。
2)數據結構
V4L2的主要數據結構是video_device,定義在v4l2_dev.h中:
struct video_device
{
/* device ops */
const struct v4l2_file_operations *fops; /*接口函數指針*/
/* sysfs */
struct device dev; /* v4l 設備結構 */
struct cdev *cdev; /* 字符設備結構*/
/* Set either parent or v4l2_dev if your driver uses v4l2_device */
struct device *parent; /* 設備父指針 */
struct v4l2_device *v4l2_dev; /* v4l2設備指針*/
/* device info */
char name[32]; /*設備名稱*/
int vfl_type;
/* 'minor' is set to -1 if the registration failed */
int minor; /*次設備號*/
u16 num;
/* use bitops to set/clear/test flags */
unsigned long flags;
/* attribute to differentiate multiple indices on one physical device */
int index;
/* V4L2 file handles */
spinlock_t fh_lock; /* Lock for all v4l2_fhs */
struct list_head fh_list; /* List of struct v4l2_fh */
int debug; /* debug 級別*/
/* Video 標準變量 */
v4l2_std_id tvnorms; /* Supported tv norms */
v4l2_std_id current_norm; /* Current tvnorm */
/* 回調函數 */
void (*release)(struct video_device *vdev);
/* ioctl 回調函數 */
const struct v4l2_ioctl_ops *ioctl_ops;
};
主要接口函數有:
intvideo_register_device(struct video_device *vdev, int type, int nr);
static intv4l2_ioctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg);
2. FIMC
1)簡介
FIMC這個模塊不僅僅是一個攝像頭的控制接口,它還承擔著V4L2的output功能和overlay的功能。
FIMC的驅動在內核中的位置:drivers/media/video/samsung/fimc
它包含下邊的文件:
fimc_regs.c
fimc_capture.c
fimc_dev.c
fimc_output.c
fimc_overlay.c
fimc_v4l2.c
它們的組織關系如下:
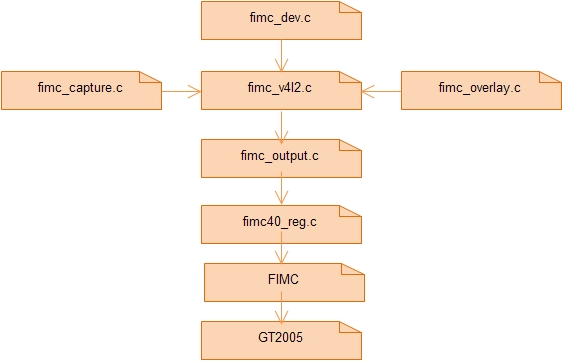
可以看到,FIMC的驅動實現了v4l2所有的接口,可以分為v4l2-input設備接口,v4l2-output設備接口以及v4l2-overlay設備接口。這里我們主要關注v4l2-input設備接口,因為攝像頭屬于視頻輸入設備。
fimc_v4l2.c里面注冊了很多的回調函數,都是用于實現v4l2的標準接口的,但是這些回調函數基本上都不是在fimc_v4l2.c里面實現的,而是有相應的.c分別去實現。比如:
v4l2-input設備的操作實現:fimc_capture.c
v4l2-output設備的操作實現: fimc_output.c
v4l2-overlay設備的操作實現: fimc_overlay.c
這些代碼其實都是和具體硬件操作無關的,這個驅動把所有操作硬件寄存器的代碼都寫到一個文件里面了,就是fimc40_regs.c。這樣把硬件相關的代碼和硬件無關的代碼分開來實現是非常好的方式,可以最大限度的實現代碼復用。
2) 數據結構
FIMC的主要數據結構fimc_control,定義在fimc.h中:
struct fimc_control {
int id; /* 控制器 id */
char name[16];
atomic_t in_use;
void __iomem *regs; /* 寄存器 i/o */
struct clk *clk; /* interface clock */
struct regulator *regulator; /* pd regulator */
struct fimc_meminfo mem; /* for reserved mem */
/* kernel helpers */
struct mutex lock; /* controller lock */
struct mutex alloc_lock;
struct mutex v4l2_lock;
wait_queue_head_t wq;
struct device *dev;
int irq;
/* v4l2 related */
struct video_device *vd;
struct v4l2_device v4l2_dev;
/* fimc specific */
struct fimc_limit *limit; /* H/W limitation */
struct s3c_platform_camera *cam; /* activated camera */
struct fimc_capinfo *cap; /* capture dev info */
struct fimc_outinfo *out; /* output dev info */
struct fimc_fbinfo fb; /* fimd info */
struct fimc_scaler sc; /* scaler info */
struct fimc_effect fe; /* fimc effect info */
enum fimc_status status;
enum fimc_log log;
u32 ctx_busy[FIMC_MAX_CTXS];
};
因為FIMC一共有三套一樣的控制器(fimc0, fimc1, fimc2),所以驅動里使用了一個數組來描述:
struct video_device fimc_video_device[FIMC_DEVICES] = {


上一篇:《設備樹 — dtb到device node的轉換(三)》
下一篇:S5PV210 三個Camera Interface/CAMIF/FIMC的區別
推薦閱讀最新更新時間:2025-06-01 10:59

 Android版《kotlin協程入門進階實戰指南》
Android版《kotlin協程入門進階實戰指南》 振蕩電路的設計與應用
振蕩電路的設計與應用設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- 使用 NXP Semiconductors 的 MC32PF3000A1EP 的參考設計
- ADR430A 2.048 Vout 超低噪聲 XFET 電壓基準的典型應用,具有灌電流和拉電流能力
- 使用 ROHM Semiconductor 的 BD5230 的參考設計
- AC164110,基于 44 引腳薄型四方扁平封裝 (TQFP) PICmicro 微控制器單元的 44 引腳演示板
- LTC1530CS8 演示板、高效升壓穩壓器、3.3Vin、5Vout @ 5A
- DC1788B-C,使用 LT4275CIDD PoE+ PD 控制器的演示板,符合 IEEE 802.3at/IEEE 802.3af
- 基于STSPIN32F0601的EVSPIN32F0601S1三相逆變器
- 2相單極步進電機驅動IC —— TB67S142NG
- 用于車載和工業直流電機的H橋驅動電路
- NCP380LSNAJAGEVB,筆記本USB開關評估板













 京公網安備 11010802033920號
京公網安備 11010802033920號