本文主要介紹圖像分割基于閾值處理的一些基本方法。
一、基于閾值的分割方法
1.1 固定閾值法——直方圖雙峰法
該方法基于圖像直方圖上出現(xiàn)的雙峰現(xiàn)象。當一個圖像有雙峰現(xiàn)象時,其直方圖會出現(xiàn)兩個峰,分別對應(yīng)圖像中兩種不同的顏色或亮度區(qū)域。這時我們可以使用直方圖雙峰法來自動確定合適的閾值。
其基本思路如下:
1. 計算圖像的灰度直方圖。
2. 根據(jù)直方圖的兩個峰的位置,計算出兩個峰之間的閾值,作為圖像的閾值。
3. 根據(jù)計算出的閾值對圖像進行二值化處理,將圖像分成目標和背景兩個部分。
注意:該方法只適用于存在雙峰現(xiàn)象的圖像,對于單峰或峰不明顯的圖像,則需要使用其他的閾值分割方法。
使用cv2.threshold(src, thresh, maxval, type)函數(shù)。

常用的閾值處理方法有:
1.THRESH_BINARY 二值閾值化該方法將像素值與設(shè)定的閾值進行比較,若像素值大于等于閾值,則將該像素值設(shè)為最大值,否則設(shè)為0。可以用于處理灰度圖像與彩色圖像。
2.THRESH_BINARY_INV 反二值閾值化該方法將像素值與設(shè)定的閾值進行比較,若像素值小于閾值,則將該像素值設(shè)為最大值,否則設(shè)為0。可以用于處理灰度圖像與彩色圖像。
3.THRESH_TRUNC 截斷閾值化該方法將像素值與設(shè)定的閾值進行比較,若像素值大于等于閾值,則將該像素值設(shè)為閾值,否則不更改。可以用于處理灰度圖像。
4.THRESH_TOZERO 零閾值化該方法將像素值與設(shè)定的閾值進行比較,若像素值大于等于閾值,則不更改,否則設(shè)為0。可以用于處理灰度圖像。
5.THRESH_TOZERO_INV 反零閾值化該方法將像素值與設(shè)定的閾值進行比較,若像素值小于等于閾值,則不更改,否則設(shè)為0。可以用于處理灰度圖像
代碼:
# 直方圖雙峰法import cv2import numpy as npfrom matplotlib import pyplot as plt
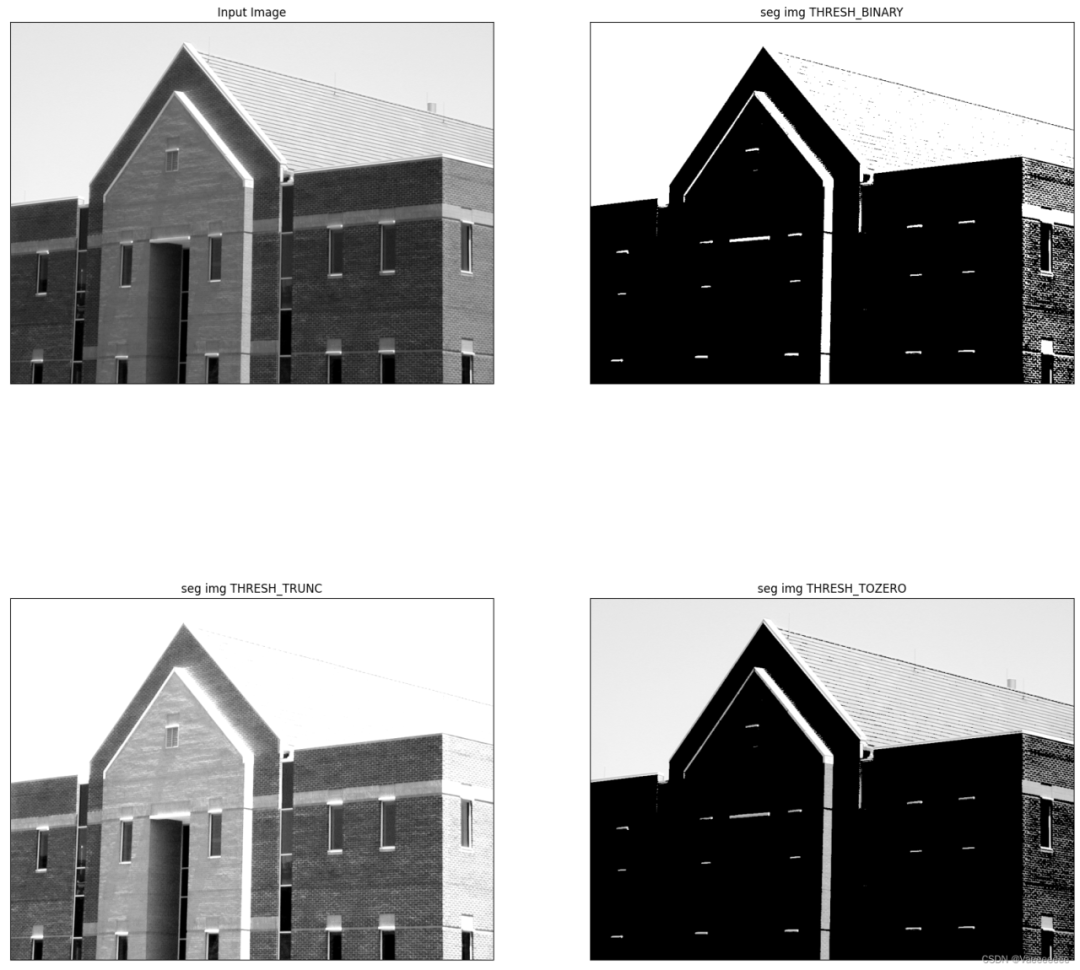
# 讀取圖像(閾值處理方法不同)img = cv2.imread('house.tif',0)x,img1 = cv2.threshold(img,150,255,cv2.THRESH_BINARY)x,img2 = cv2.threshold(img,150,255,cv2.THRESH_TRUNC)x,img3 = cv2.threshold(img,150,255,cv2.THRESH_TOZERO)
# 顯示原始圖像和恢復(fù)后的圖像plt.figure(figsize=(20, 20))plt.subplot(221), plt.imshow(img, cmap='gray')plt.title('Input Image'), plt.xticks([]), plt.yticks([])plt.subplot(222), plt.imshow(img1, cmap='gray')plt.title('seg img THRESH_BINARY'), plt.xticks([]), plt.yticks([])plt.subplot(223), plt.imshow(img2, cmap='gray')plt.title('seg img THRESH_TRUNC'), plt.xticks([]), plt.yticks([])plt.subplot(224), plt.imshow(img3, cmap='gray')plt.title('seg img THRESH_TOZERO'), plt.xticks([]), plt.yticks([])plt.show()
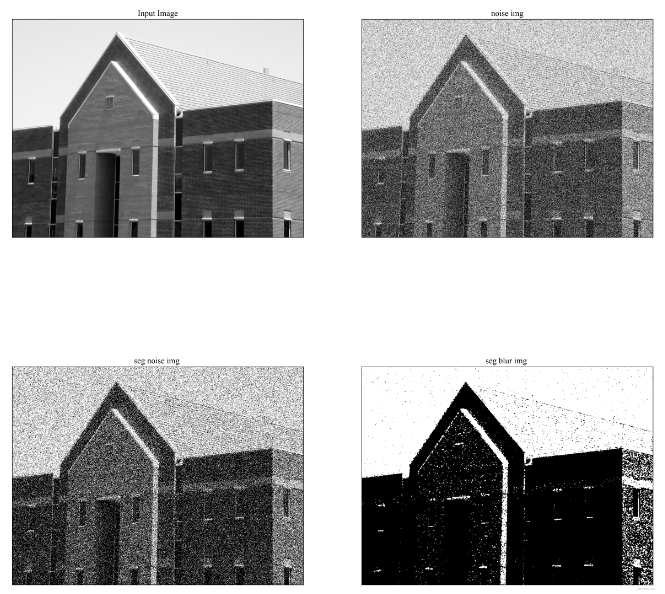
這種全局閾值處理方法缺點是對噪聲的處理的效果并不好,需要進行平滑處理。
import cv2import randomimport numpy as npfrom matplotlib import pyplot as pltimg = cv2.imread('house.tif',0)
# 加上高斯噪聲noise = np.random.normal(0,100,size=img.size).reshape(img.shape[0],img.shape[1])img1 = img + noiseimg1 = np.clip(img1,0,255)
# 平滑處理img2 = cv2.GaussianBlur(img1,(5,5),0)
# 直方圖雙峰法x,img3 = cv2.threshold(img,150,255,cv2.THRESH_BINARY)x,img4 = cv2.threshold(img1,150,255,cv2.THRESH_BINARY)x,img5 = cv2.threshold(img2,150,255,cv2.THRESH_BINARY)
# 顯示原始圖像和恢復(fù)后的圖像plt.figure(figsize=(20, 20))plt.subplot(221), plt.imshow(img, cmap='gray')plt.title('Input Image'), plt.xticks([]), plt.yticks([])plt.subplot(222), plt.imshow(img1, cmap='gray')plt.title('noise img'), plt.xticks([]), plt.yticks([])plt.subplot(223), plt.imshow(img4, cmap='gray')plt.title('seg noise img '), plt.xticks([]), plt.yticks([])plt.subplot(224), plt.imshow(img5, cmap='gray')plt.title('seg blur img '), plt.xticks([]), plt.yticks([])plt.show()
1.2 迭代閾值圖像分割
這一種自適應(yīng)的圖像分割方法,其主要思想是通過對圖像的灰度值進行迭代,不斷調(diào)整閾值使得分割更加準確。
分割步驟如下:
1. 隨機選取一個初始閾值(可以是圖像的平均灰度值)
2. 根據(jù)該閾值將圖像分割成兩部分:小于等于閾值的部分為前景,大于閾值的部分為背景
3. 計算前景和背景的平均灰度值
4. 將前景和背景的平均灰度值的平均值作為新的閾值
5. 如果新的閾值和原來的閾值相同,則分割結(jié)束。否則,回到第2步,重復(fù)迭代直到收斂
代碼:
# 迭代閾值圖像分割法import numpy as npfrom PIL import Image
# 讀取圖像img = Image.open('house.tif').convert('L')width, height = img.sizepixels = img.load()
# 初始化閾值threshold = 150delta = 1while delta > 0: # 根據(jù)閾值將圖像分割 foreground = [] background = [] for y in range(height): for x in range(width): if pixels[x, y] > threshold: background.append(pixels[x, y]) #大于閾值的部分為背景 else: foreground.append(pixels[x, y]) #小于等于閾值的部分為前景 avr_foreground = sum(foreground) // len(foreground) avr_background = sum(background) // len(background) # 更新閾值 new_threshold = (avr_foreground + avr_background) // 2 delta = abs(new_threshold - threshold) threshold = new_threshold
# 重新分割圖像for y in range(height): for x in range(width): if pixels[x, y] > threshold: pixels[x, y] = 255 else: pixels[x, y] = 0
# 顯示分割后的圖像img.show('result.jpg')
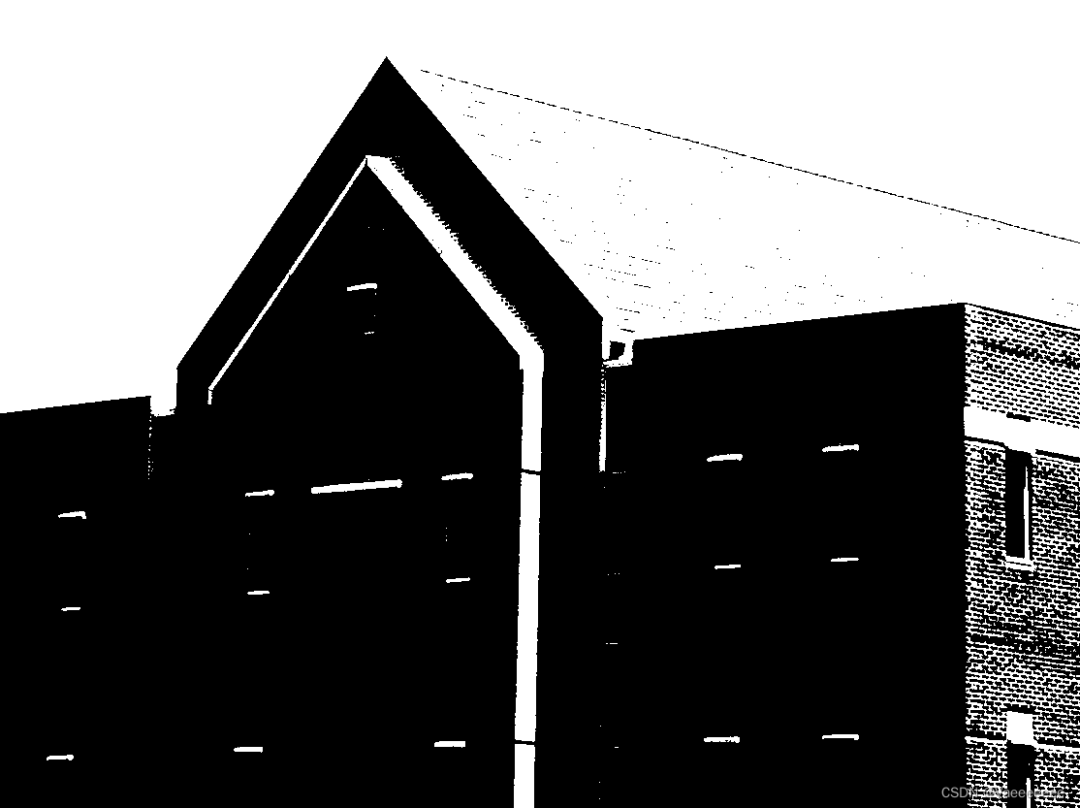
優(yōu)點: 1.迭代閾值圖像分割相對于靜態(tài)閾值分割而言,具有更高的實用性和魯棒性。 2.該方法能夠有效地應(yīng)對光照變化、背景復(fù)雜多樣等情況下的圖像分割問題。缺點: 對于大尺寸圖像,迭代閾值圖像分割的計算速度可能成為其一個缺點。
1.3 自適應(yīng)閾值圖像分割
1.3.1 常規(guī)方法
分割步驟如下:
1. 針對輸入的灰度圖像,定義一個大小為 N × N N×NN×N 的窗口,在窗口中央選擇一個像素點作為處理的核心像素點。
2. 根據(jù)窗口內(nèi)的像素信息計算局部閾值,作為當前像素的閾值,這個閾值可以是均值、中值、模式等統(tǒng)計量。
3. 將處理完的像素點和當前像素點的局部閾值進行比較,大于等于閾值的像素點設(shè)置為白色,小于閾值的像素點設(shè)置為黑色,分割出新的二值化圖像。
4. 將窗口向圖像的其他區(qū)域移動,繼續(xù)對各個區(qū)域進行高斯自適應(yīng)閾值分割,直到圖像的所有區(qū)域都被分割為二值化圖像。
代碼:
# 自適應(yīng)閾值圖像分割import numpy as npfrom PIL import Image
# 圖像預(yù)處理img = Image.open('house.tif').convert('L')width, height = img.sizepixels = img.load()block_size = 11 # 設(shè)置塊大小
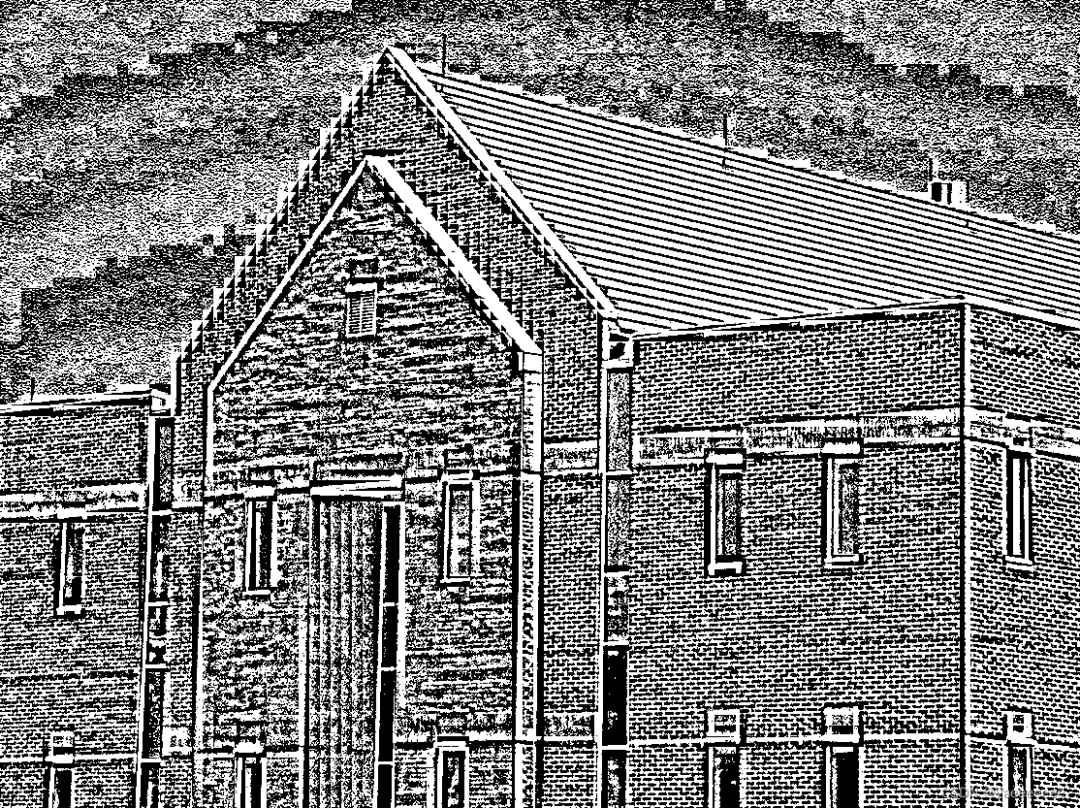
# 分割圖像并計算局部閾值for y in range(0, height, block_size): for x in range(0, width, block_size): # 獲取局部區(qū)域 region = [] for j in range(y, y+block_size): for i in range(x, x+block_size): if i < width and j < height: region.append(pixels[i, j]) # 計算局部區(qū)域平均值作為閾值 threshold = sum(region) // len(region) # 對區(qū)域進行二值化處理 for j in range(y, y+block_size): for i in range(x, x+block_size): if i < width and j < height: if pixels[i, j] > threshold: pixels[i, j] = 255 else: pixels[i, j] = 0
#顯示分割后的圖像img.show('result.jpg')
也可以直接調(diào)用cv2.adaptiveThreshold()函數(shù)實現(xiàn)。
import cv2# 讀取原始圖像img = cv2.imread('house.tif', 0)# 自適應(yīng)閾值分割img_thresh = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)# 顯示結(jié)果cv2.imshow('Original Image', img)cv2.imshow('Adaptive Thresholding', img_thresh)cv2.waitKey(0)cv2.destroyAllWindows()
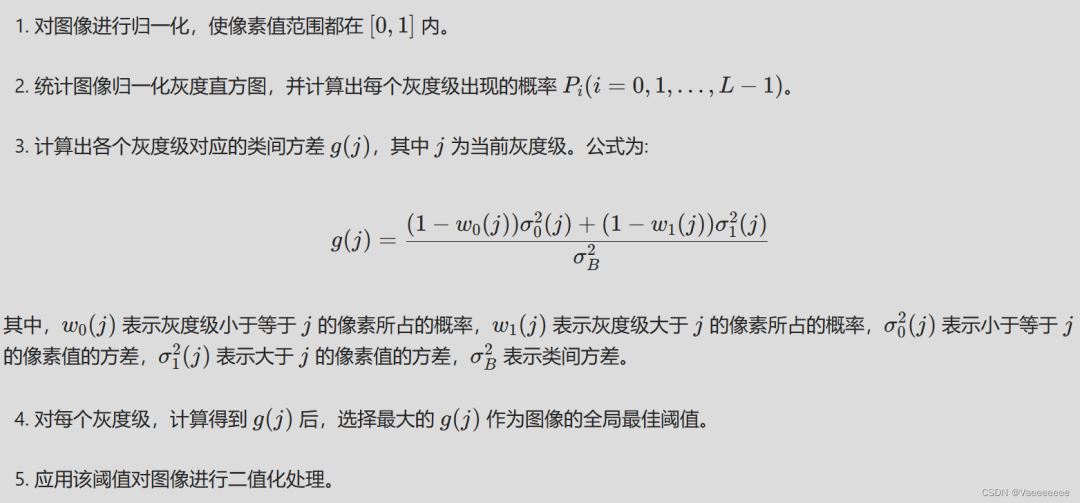
1.3.2 大津法(OTSU)
大津法基于以下觀察結(jié)果:當圖像被分為多個區(qū)域時,如果區(qū)域內(nèi)的像素值差異較小,區(qū)域的均值方差就會較小。而當區(qū)域內(nèi)像素值差異較大時,區(qū)域的均值方差就會較大。因此,局部圖像的全局最佳閾值是能使類間方差最大的那個灰度級。
步驟:
代碼:
import cv2
# 讀取圖片img = cv2.imread('house.tif', 0)
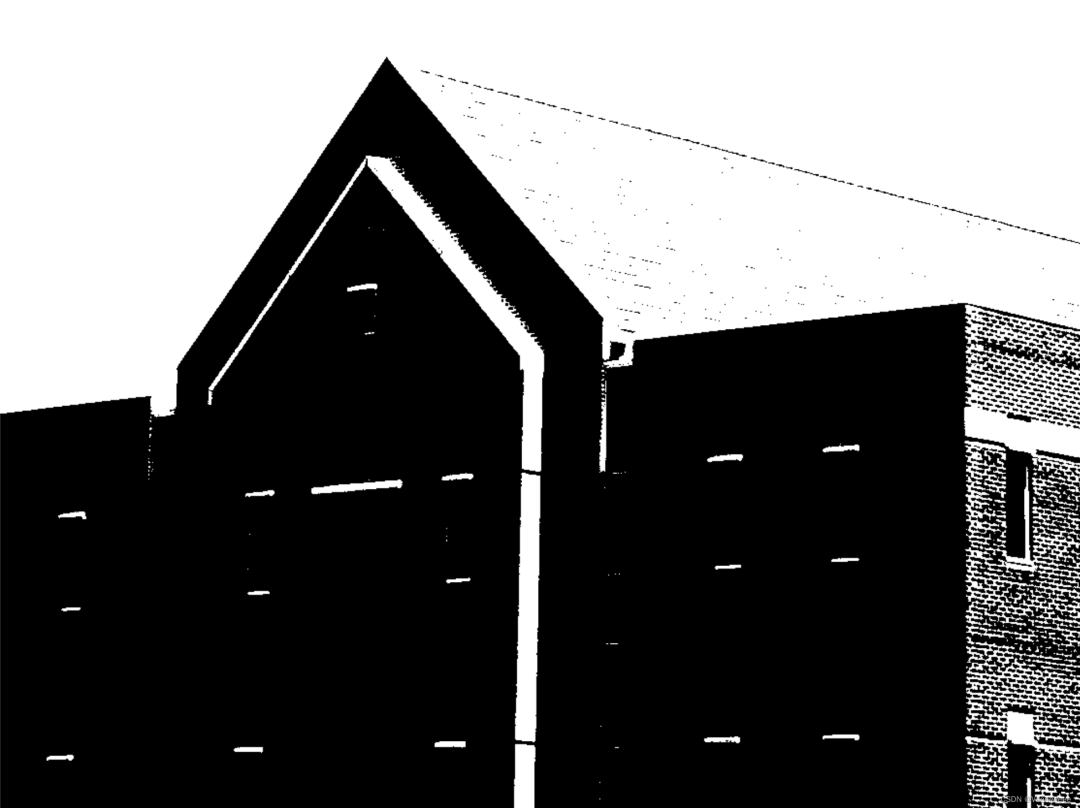
# 大津法閾值分割ret, img_thresh = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 顯示結(jié)果cv2.imshow('Original Image', img)cv2.imshow('OTSU Thresholding', img_thresh)cv2.waitKey(0)cv2.destroyAllWindows()
優(yōu)點: 多種檢測任務(wù)效果較好。缺點: 計算量比較大,適用于數(shù)據(jù)量較小的圖像分割場合。
參考文獻:
[1] 阮秋琦,阮宇智譯;(美)拉斐爾·C.岡薩雷斯,理查德·E.伍茲.國外電子書與通信教材系列 數(shù)字圖像處理 第4版[M].北京:電子工業(yè)出版社,2020
上一篇:電動機多繞幾圈有影響嗎?
下一篇:編碼器與PLC的接線方法
- 熱門資源推薦
- 熱門放大器推薦
 開關(guān)電源EMI技術(shù)文檔
開關(guān)電源EMI技術(shù)文檔 LM139FH
LM139FH

- 【武漢理工大學(xué)校賽】電子設(shè)計競賽
- AD1583 2.5V 至 5.0V 微功率、精密串聯(lián)模式電壓基準的典型應(yīng)用電路
- LTC3214EDD 演示板,低噪聲、高電流 LED 閃光燈充電泵,Vin = 2.9V - 4.4V
- 使用基于 ZICM3588SP0-1-R Ember EM35x 收發(fā)器模塊的 Mesh Connect EM35x 迷你模塊的典型應(yīng)用電路
- FEBFCM8531_B01H300A,用于 FCM8531 SOC 應(yīng)用處理器的 PMSM/BLDC 電機控制評估板
- 使用 Microchip Technology 的 TCL1584 的參考設(shè)計
- LTC3632EMS8E 高效 5V 穩(wěn)壓器的典型應(yīng)用電路
- TCR5SB25A、150mA、2.5V 輸出電壓 CMOS 低壓降穩(wěn)壓器的典型應(yīng)用
- LT1072HVIT 負降壓轉(zhuǎn)換器的典型應(yīng)用
- 雙子座 ELRS 高頻頭 Genimi 高頻頭 (使用ESP32模塊)






- STM32G070單片機 PD0 PB15引腳內(nèi)部下拉使用需要主意
- 2022年新車強制安裝EDR,汽車“黑匣子”市場即將爆發(fā)
- C51單片機同時擴展SRAM和EPROM
- 任意波形發(fā)生器的作用是什么
- 工作場所中的協(xié)作:新一代協(xié)作機器人如何改善手動工作的性質(zhì)
- 汽車電子風(fēng)扇它是如何工作的
- AT89C51與AT89S51有何不同_AT89C51與AT89S51的區(qū)別
- ARM+FPGA開發(fā)板基于FFMPEG的網(wǎng)絡(luò)視頻播放終端——米爾NXP I.MX 8M
- Akamai 推出 Prolexic 網(wǎng)絡(luò)云防火墻
- 網(wǎng)絡(luò)分析儀的應(yīng)用領(lǐng)域 網(wǎng)絡(luò)分析儀的選型指南
- 大眾汽車宣布明年起其所有電動車型全面轉(zhuǎn)向磷酸鐵鋰電池,升級至MEB Plus平臺
- 總產(chǎn)值破2000億,深圳要做“機器人第一城”?
- 鴻道Intewell操作系統(tǒng) 人形機器人底層操作系統(tǒng)
- 如何定位國產(chǎn)智駕芯片的終局價值?
- 新一代車規(guī)級數(shù)字功放電感VSAD-T系列 為汽車音響注入高保真基因
- 蜂巢能源快充電池突破:15分鐘充至滿電,提升30%效率
- 整車操作系統(tǒng)何以躋身智能汽車三大件?
- 人形機器人如何做到“手眼”協(xié)同+“大小腦”協(xié)同?
- 中國電池公司獲英國政府10億英鎊支持!
- 從游戲到智能駕駛,英偉達有哪些技術(shù)升級?
- SMIC向ASML訂購新型EUV光刻機 2019年交貨
- 三星正與中興洽談供貨 不在意貿(mào)易談判進展
- 研調(diào):硅晶圓Q1出貨創(chuàng)新高 價格續(xù)漲供不應(yīng)求
- 兆易創(chuàng)新派發(fā)2017年股票紅利,通富微電由中外合資變更內(nèi)資
- 兆易創(chuàng)新派發(fā)2017年股票紅利,三大主線推動全年再創(chuàng)新高
- 上汽集團攜手英飛凌成立功率半導(dǎo)體合資企業(yè)
- 華燦光電超40億募資布局產(chǎn)業(yè)擴張
- 歐陽武委員:打破服務(wù)器芯片壟斷
- 傳大陸年底前關(guān)閉境內(nèi)所有礦場
- 比特大陸加速轉(zhuǎn)型投資AI







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號