一直都想知道永磁同步電機的轉速從零增加到極限這個過程會發生什么,這篇文章介紹一下永磁同步電機全速域矢量控制的全過程,即電機的轉速從零開始逐漸增加,如何設計電流環電流使得電機輸出恒定轉矩,且保持轉速穩定。能把這個過程想清楚,會對電機控制有更深的理解,預告一下,這篇文章會講清楚三種矢量控制的基本方法:
1) 控制
控制
2)最大轉矩/電流控制(MTPA)
3)弱磁控制
背景知識
電機涉及到的知識太多了,沒辦法把背景知識全部講清楚,這里把需要的一些背景知識列出來,分析的時候可以先不去理解這些背景知識的含義,直接當成結論使用,對理解會更加方便。
永磁同步電機的控制策略主要有1)直接轉矩控制,2)矢量控制,本文僅討論矢量控制策略下的調速過程。
矢量控制將電機三相定子電流解耦為互相垂直的電流分量(d軸,q軸),矢量控制的基本方法有 控制,最大轉矩電流比控制(MTPA),弱磁控制等。
轉矩方程:


電壓方程:

其中,

理論分析
總的來說,電機轉速增加的過程可以概括為這三個階段:
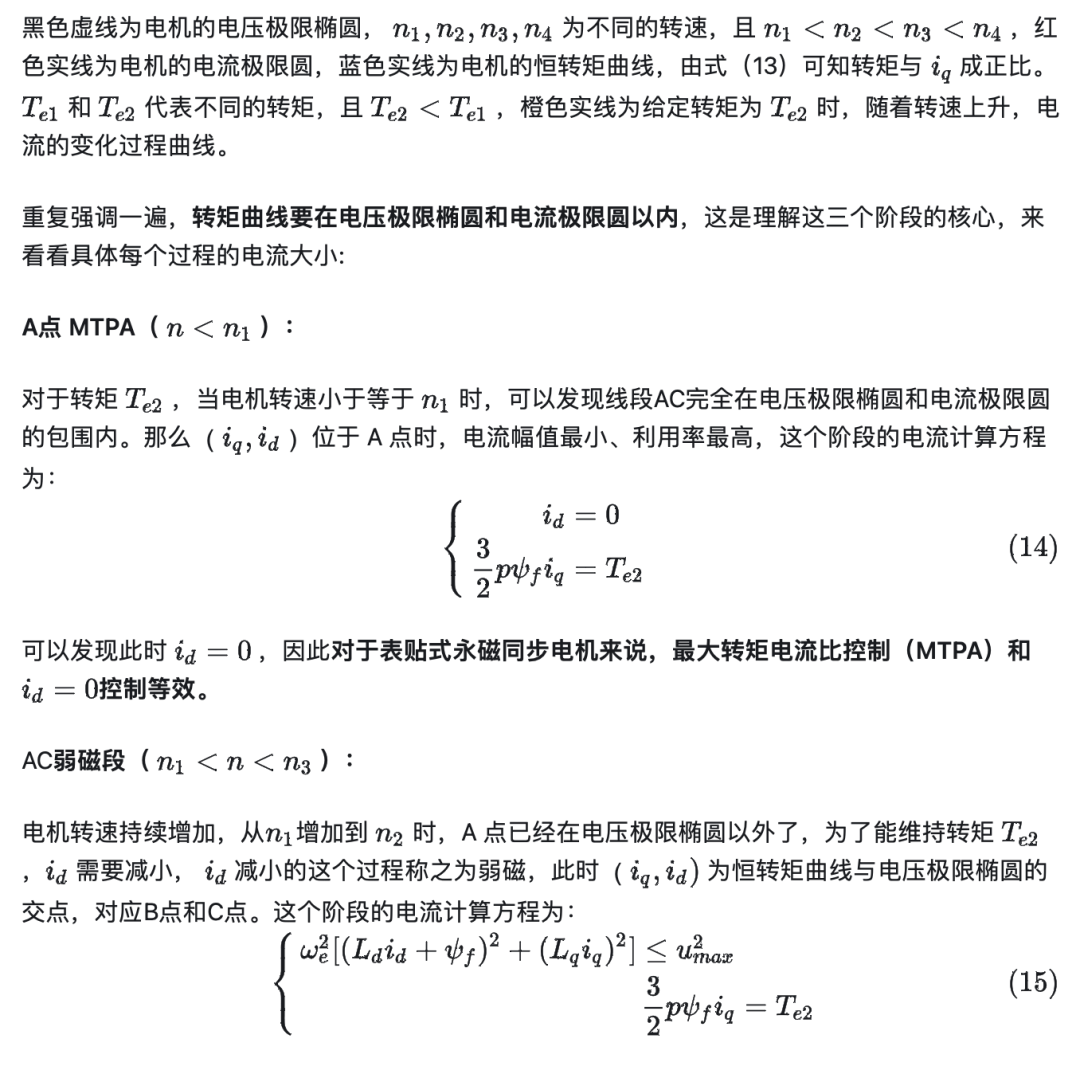
1)當電機的轉速在額定轉速以內時,電機會以 最大轉矩電流比控制(MTPA)的控制策略工作。
2)繼續增加轉速,電機受到電壓的限制,而不得不工作在弱磁控制來維持轉矩
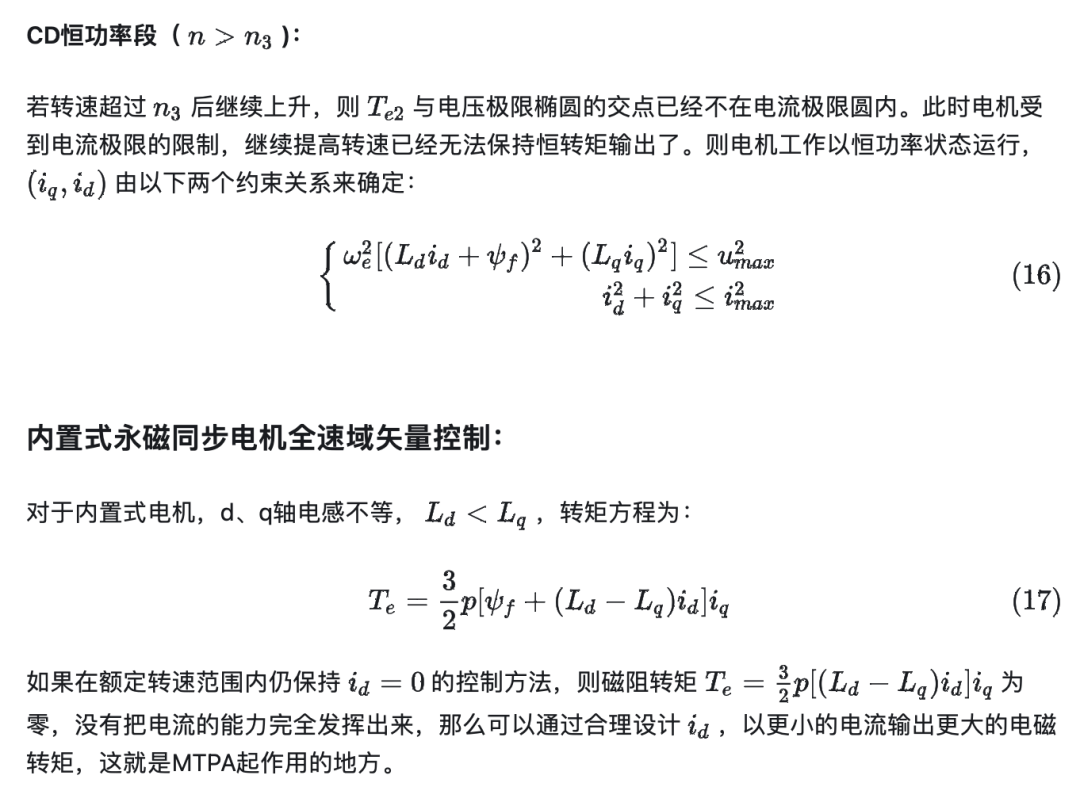
3)繼續增加轉速,電機受到電流的限制,電機以恒功率條件運行,輸出的轉矩會隨著轉速的增加而下降。
逐步分析以上結論:
首先要明白電流約束和電壓約束這兩個概念,電機的能量是有限的,電機不可能達到無窮大轉速,永磁同步電機電流矢量Is和電壓矢量Us有如下約束條件:

表貼式永磁同步電機全速域矢量控制分析
表貼式永磁同步電機和內置式永磁同步電機結構上有差異,這里先介紹表貼式永磁同步電機的速度控制過程。
表貼式永磁同步電機d、q軸電感相同,Ld=Lq,因此轉矩方程為:

調速全過程可以用圖1來完全表征:
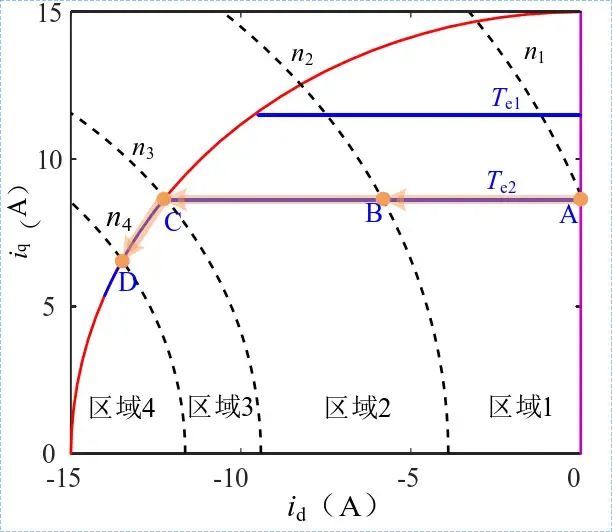
圖1 表貼式永磁同步電機的全速域電流變化過程
繼續來看圖,調速全過程用圖 2 來完全表征:

圖2 內置式永磁同步電機全速域電流變化過程
最后再來看一下電機速度從零增加到極限的三個階段,是不是更加清晰了
1)當電機的轉速在額定轉速以內時,電機會以 最大轉矩電流比控制(MTPA)的控制策略工作。
2)繼續增加轉速,電機受到電壓的限制,而不得不工作在弱磁控制來維持轉矩
3)繼續增加轉速,電機受到電流的限制,電機以恒功率條件運行,輸出的轉矩會隨著轉速的增加而下降。
關鍵字:永磁同步電機 轉速
引用地址:
永磁同步電機轉速增長過程中的變化與影響
推薦閱讀最新更新時間:2025-04-23 16:50
永磁同步電機反電勢是如何產生的?為什么叫反電勢呢?
1.反電勢是如何產生的? 其實反電勢的產生很好理解,記憶力稍好的同學都應該知道早在初中和高中時就已經接觸過,只是當時的叫法是感應電動勢,其原理就是導體切割磁感線,只要兩者有相對運動就行,可以是磁場不動,導體切割;也可以是導體不動,讓磁場動。對于永磁同步電機而言,其線圈固定在定子上(導體),永磁體固定在轉子上(磁場),當轉子轉動時,轉子上的永磁體產生的磁場就會旋轉起來,就會被定子上的線圈進行切割,并在線圈中產生反電勢。為什么叫反電勢呢?顧名思義,因為反電勢E的方向和端電壓U方向相反(如圖1所示)。 圖1 2.反電勢和端電壓有什么關系? 從圖1中可以看出在負載下反電勢和端電壓的關系式為: 對于反電勢的測試,一般是在空載狀態下,
[嵌入式]

永磁同步電機控制系統仿真—最大轉矩電流比
**最大轉矩電流比 ** 最大轉矩電流比(Maximum Torque per Ampere,MTPA)就是一種電機在不同的轉速和轉矩給定下,確定d軸電流和q軸電流給定值的方法,以保證電機的效率處于最優狀態。 實際應用時有兩種,一種是解析法,另一種是Look Up Table法。由于永磁同步電機參數的非線性,解析法在工程上不實用,但有助于理解和分析。Look Up Table法通過標定將解析方程和非線性參數轉化為Look Up Table,更為實用和簡單。 當永磁同步電機工作在線性調制區,且主要損耗為銅損耗時,MTPA點與最優效率點近似相等。在實際工程中,永磁同步電機不僅存在銅損耗,還存在鐵損、渦流損耗、機械損耗等,特別是
[嵌入式]
永磁同步電機詳細講解
永磁同步電機詳細講解 永磁同步電動機以永磁體提供勵磁,使電動機結構較為簡單,降低了加工和裝配費用,且省去了容易出問題的集電環和電刷,提高了電動機運行的可靠性;又因無需勵磁電流,沒有勵磁損耗,提高了電動機的效率和功率密度。 永磁同步電動機由定子、轉子和端蓋等部件構成。定子與普通感應電動機基本相同,采用疊片結構以減小電動機運行時的鐵耗。轉子可做成實心,也可用疊片疊壓。電樞繞組可采用集中整距繞組的,也可采用分布短距繞組和非常規繞組。 永磁同步電機主要由定子、轉子和端蓋等部件構成,定子由疊片疊壓而成以減少電動機運行時產生的鐵耗,其中裝有三相交流繞組,稱作電樞。轉子可以制成實心的形式,也可以由疊片壓制而成,其上裝有永
[嵌入式]
永磁同步電機控制系統的串行通信實現
在開發一套以DSP為核心的永磁同步電機控制系統時,需要及時觀察驅動系統中的各個變量,同時還要對一些程序進行控制,修改特定參數。DSP在實際運行中不能用外接的端口進行控制,需要用DSP自帶的串行通信模塊來解決這一問題。通過一臺上位計算機和以DSP為核心的電機控制系統構成整個監控系統,Pc機通過串口來改變DSP程序中轉矩、磁鏈給定,以及調節PI參數等,電機控制系統完成對電機的控制,并采集相關數據反饋到Pc機中進行分析、處理、顯示和存儲。本文以DSP控制永磁同步電機為例,介紹在整個控制系統中串行通信的實現。 1 永磁同步電機控制系統 永磁同步電機控制系統框圖如圖1所示,采用直接轉矩控制方法,這是19世紀80年代提出的交流
[工業控制]
轉速檢測儀表的分類及介紹
轉速表儀表的分類介紹: 離心式轉速表:利用離心力與拉力的平衡來指示轉速。離心式轉速儀是最傳統的轉速測量工具,是利用離心力原理機械式轉速表;測量精度一般在1~2級,一般就地安裝。一只優良的離心式轉速表不但有準確直觀的特點,還具備可靠耐用的優點。離心式轉速表,是機械力學的成果,但是結構比較復雜。 磁性轉速表:利用旋轉磁場,在金屬罩帽上產生旋轉力,利用旋轉力與游絲力的平衡來指示轉速。磁性轉速表,是成功利用磁力的一個典范,是利用磁力原理的機械式轉速表;一般就地安裝,用軟軸可以短距離異地安裝。磁性轉速表,因結構較簡單,目前較普遍用于摩托車和汽車以及其它機械設備。異地安裝時軟軸易損壞。磁性式轉速表,是運用磁力和機械
[測試測量]
無線遙控的微震電機震動轉速控制電路介紹
本文介紹一種無線遙控的微震電機震動轉速控制電路,可以在無線遙控的方式下完成電機轉速的啟動、停止、加速、減速控制。
電路原理
微震電機(又稱空心杯電機)具有體積小、震感明顯的特點,常見的形狀如圖1所示。市場上有許多型號的產品,均為直流電壓驅動工作。這里以 WZIS-6001A(B)型為例,其特性見表1。該電機在電壓由2.0~3.8V變化時,隨著電壓的升高,電機的轉速逐步升高(由7000~11 000rpm)。經實驗測試,當電壓產生0.3V的變化時,可以通過電機的震動感覺到電機轉速的變化。
圖1 微震電機的外形
將2.0~3.8V的電壓范圍分成7個電壓擋位,分別是2.0V、2
[嵌入式]
旋轉速率傳感器KMI10
KMI10系列旋轉速率傳感器又稱齒輪傳感器。它是Philips公司研制開發的以Ni-Fe合金薄膜磁阻元件為核心的敏感元件,這種新穎的旋轉速度傳感器基于薄膜磁阻元件的磁阻效應原理而制成的。采用二線制模式,能實現信號的遠距離傳輸;KMI10薄膜磁阻元件具有優良的溫度和頻率特性,能實現“靜止”狀態的旋轉速度的檢測。可用于將旋轉速度、位置和方向等物理量轉換成電信號,因而可廣泛應用于工業、汽車電子了、國防、儀器儀表等行業。
1 結構原理
旋轉速度傳感器KMI10系列由NI-Fe合金薄膜磁阻元件、偏置磁鋼、信號處理集成電路部分構成。圖1所示是KMI10的組成原理圖;KMI10系列旋轉速度傳感器的工作原理圖如圖2所示,KMI10的目標檢
[應用]
 智能汽車傳感器技術詳解(357頁)
智能汽車傳感器技術詳解(357頁) 怎樣識讀電氣控制電路圖(鄭鳳翼)
怎樣識讀電氣控制電路圖(鄭鳳翼) 振蕩電路的設計與應用
振蕩電路的設計與應用













 京公網安備 11010802033920號
京公網安備 11010802033920號