一直都想知道永磁同步電機的轉速從零增加到極限這個過程會發生什么,這篇文章介紹一下永磁同步電機全速域矢量控制的全過程,即電機的轉速從零開始逐漸增加,如何設計電流環電流使得電機輸出恒定轉矩,且保持轉速穩定。能把這個過程想清楚,會對電機控制有更深的理解,預告一下,這篇文章會講清楚三種矢量控制的基本方法:
1) 控制
控制
2)最大轉矩/電流控制(MTPA)
3)弱磁控制
背景知識
電機涉及到的知識太多了,沒辦法把背景知識全部講清楚,這里把需要的一些背景知識列出來,分析的時候可以先不去理解這些背景知識的含義,直接當成結論使用,對理解會更加方便。
永磁同步電機的控制策略主要有1)直接轉矩控制,2)矢量控制,本文僅討論矢量控制策略下的調速過程。
矢量控制將電機三相定子電流解耦為互相垂直的電流分量(d軸,q軸),矢量控制的基本方法有控制,最大轉矩電流比控制(MTPA),弱磁控制等。
轉矩方程:


電壓方程:

其中,

理論分析
總的來說,電機轉速增加的過程可以概括為這三個階段:
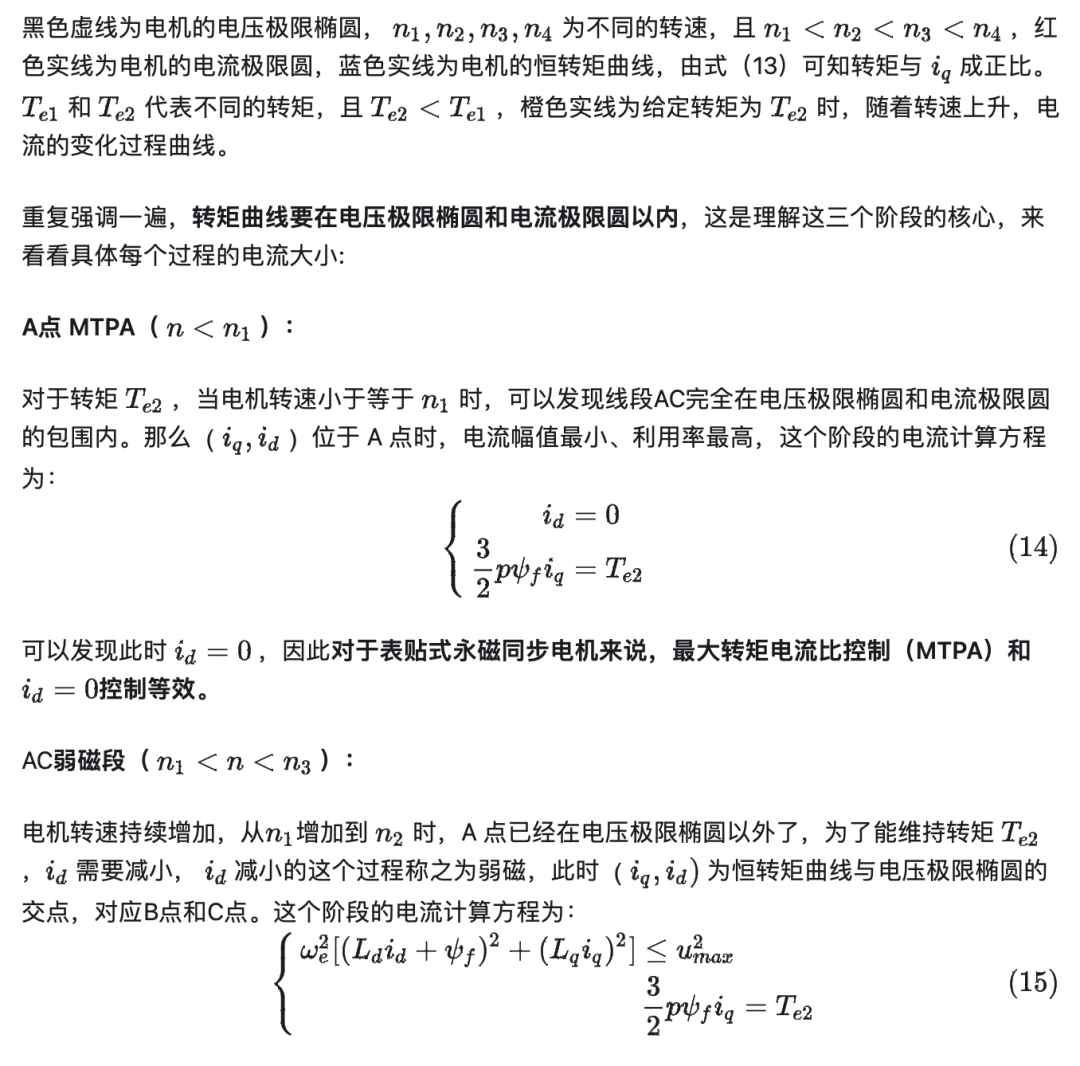
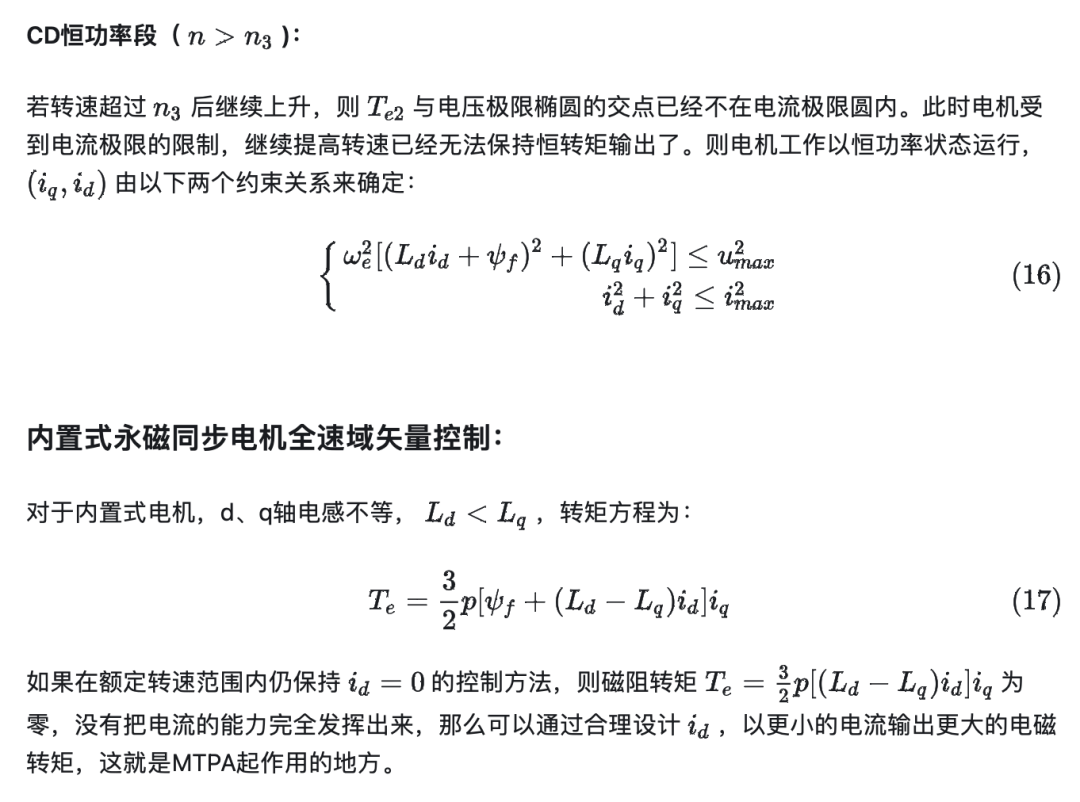
1)當電機的轉速在額定轉速以內時,電機會以最大轉矩電流比控制(MTPA)的控制策略工作。
2)繼續增加轉速,電機受到電壓的限制,而不得不工作在弱磁控制來維持轉矩
3)繼續增加轉速,電機受到電流的限制,電機以恒功率條件運行,輸出的轉矩會隨著轉速的增加而下降。
逐步分析以上結論:
首先要明白電流約束和電壓約束這兩個概念,電機的能量是有限的,電機不可能達到無窮大轉速,永磁同步電機電流矢量Is和電壓矢量Us有如下約束條件:

表貼式永磁同步電機全速域矢量控制分析
表貼式永磁同步電機和內置式永磁同步電機結構上有差異,這里先介紹表貼式永磁同步電機的速度控制過程。
表貼式永磁同步電機d、q軸電感相同,Ld=Lq,因此轉矩方程為:

調速全過程可以用圖1來完全表征:
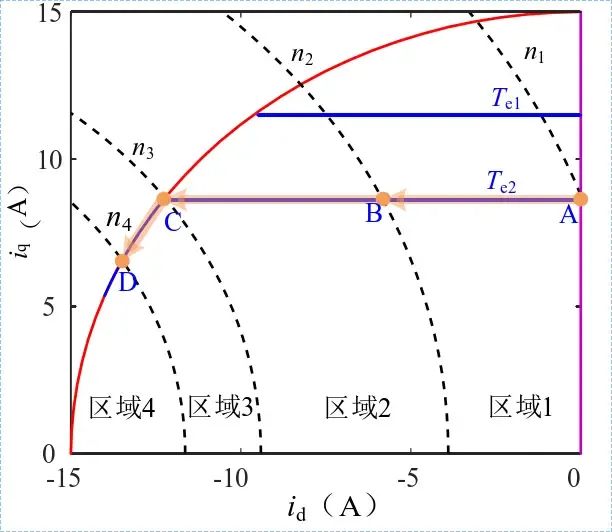
圖1 表貼式永磁同步電機的全速域電流變化過程
繼續來看圖,調速全過程用圖 2 來完全表征:
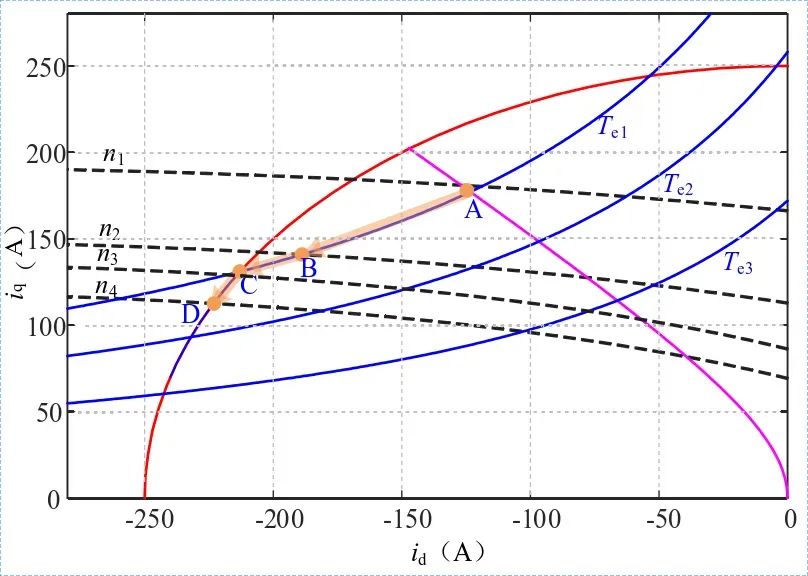
圖2 內置式永磁同步電機全速域電流變化過程
最后再來看一下電機速度從零增加到極限的三個階段,是不是更加清晰了
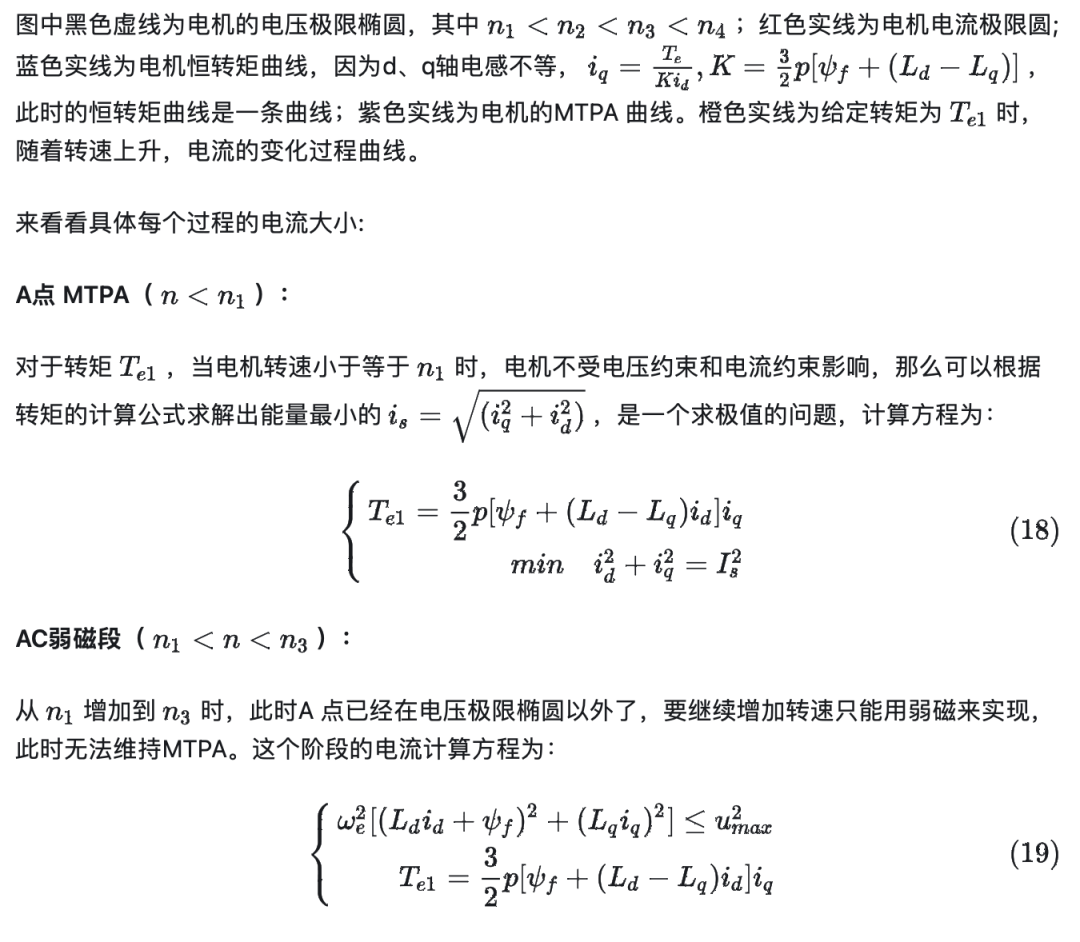
1)當電機的轉速在額定轉速以內時,電機會以最大轉矩電流比控制(MTPA)的控制策略工作。
2)繼續增加轉速,電機受到電壓的限制,而不得不工作在弱磁控制來維持轉矩
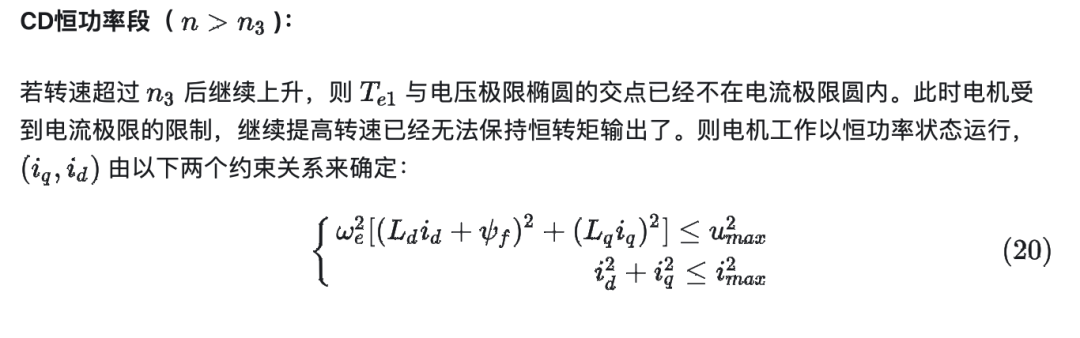
3)繼續增加轉速,電機受到電流的限制,電機以恒功率條件運行,輸出的轉矩會隨著轉速的增加而下降。
關鍵字:永磁同步電機 矢量控制
引用地址:
永磁同步電機全速域矢量控制的全過程介紹
推薦閱讀最新更新時間:2025-05-20 09:17
基于HIL+RCP的永磁同步電機矢量控制實驗
今天給大家分享的是 基于HIL+RCP的永磁同步電機矢量控制實驗。 01首先,打開Desksim軟件,載入模型文件。切換到User Interface界面,拖入一個控件,對應到電機的負載輸入。我們拖入chart,就可以選擇觀測電機的電流,轉速,角度和電磁轉矩信號。設置netbox仿真器的ip地址,就可以啟動運行這個仿真程序。 02接著,打開desksim軟件和控制測的程序。在desksim軟件中載入永磁同步電機對應的控制程序,我們需要編譯這個程序cpu部分的算法。 03編譯完成后,切換到User Interface界面,拖入一個控件,對應到算法的轉速給定值。設置默認值300;再拖入一個控件,對應到算法的使能信號,選擇觀
[嵌入式]
【STM32電機矢量控制】記錄8——ADC三電阻采樣
ADC的基本原理: ADC,Analog-to-Digital Converter的縮寫,指模/數轉換器或者模數轉換器。是指將連續變化的模擬信號轉換為離散的數字信號的器件。 與之相對應的DAC,Digital-to-Analog Converter,它是ADC模數轉換的逆向過程。 STM32中的ADC: 12位ADC是一種逐次逼近型模擬數字轉換器。它有多達18個通道,可測量16個外部和2個內部信號源。各通道的A/D轉換可以單次、連續、掃描或間斷模式執行。ADC的結果可以左對齊或右對齊方式存儲在16位數據寄存器中。 ADC的通道概念: 有16個多路通道。可以把轉換組織成兩組:規則組和注入組。在任意多個通道上
[單片機]

【STM32電機矢量控制】記錄14——霍爾傳感器
霍爾傳感器: 霍爾傳感器是可以識別轉子磁場極性的傳感裝置;霍爾傳感器根據其面對的 磁極,輸出邏輯電平0或1,因此霍爾傳感器必須按裝在轉子上。 通常在三相永磁電機中安裝三個霍爾傳感器,用來反饋轉子位置信息。它們 通常間隔120 °或者60°。 由于 STM32F103xx 具有通用定時器(TIMx)功能,微控制器與三個霍爾傳感器接口非常簡單。事實上,當寄存器TIMx_CR2 的TI1S 位被設定時,在TIMx_CH1,TIMx_CH2 和TIMx_CH3引腳的三個信號進行異或運算,由此產生的信號輸入到邏輯運行TIMx輸入捕獲中。這樣,速度的測量轉換成一個方波的周期測量,頻率比真正的電頻率高出三倍。唯一的例外的是轉動方向無法
[單片機]
永磁同步電機恒壓頻比開環控制系統Matlab/Simulink仿真分析(一)
前言 本章節采用恒壓頻比的開環控制方法驅動永磁同步電機的轉動,首先分析恒壓頻比的控制原理,然后在Matlab/Simulink中進行永磁同步電機恒壓頻比開環控制系統的仿真分析,最后將Simulink中的恒壓頻比控制算法生成代碼加載到實際工程中進行工程實現。 一、 恒壓頻比(V/F)控制原理 永磁同步電機恒壓頻比控制方法與異步電機恒壓頻比控制方法相似,也是控制電機輸入電壓與頻率同時變化,從而使氣隙磁通保持恒定。該控制方法沒有電機電流、電壓、位置等物理量的反饋,動態性能較差,在給定目標轉速發生變化或者負載突變的情況下容易產生失步和震蕩的問題,但該控制方法勝在簡單,多適用于對轉速精度要求不高的場合。 永磁同步電機恒壓頻比開環控制
[嵌入式]
變頻器矢量控制的基本原理分析
矢量控制的基本原理是通過測量和控制異步電動機定子電流矢量,根據磁場定向原理分別對異步電動機的勵磁電流和轉矩電流進行控制,從而達到控制異步電動機轉矩的目的。具體是將異步電動機的定子電流矢量分解為產生磁場的電流分量(勵磁電流)和產生轉矩的電流分量(轉矩電流)分別加以控制,并同時控制兩分量間的幅值和相位,即控制定子電流矢量,所以稱這種控制方式稱為矢量控制方式。矢量控制方式又有基于轉差頻率控制的矢量控制方式、無速度傳感器矢量控制方式和有速度傳感器的矢量控制方式等。 基于轉差頻率控制的矢量控制方式同樣是在進行U/f=恒定控制的基礎上,通過檢測異步電動機的實際速度n,并得到對應的控制頻率f,然后根據希望得到的轉矩,分別控制定子電流矢量及
[嵌入式]
基于STM32的交流永磁同步電機驅動器設計
引言 近年來,隨著微電子技術、電力電子技術、現代控制技術、材料技術的迅速發展以及電機制造工藝水平的逐步提高,交流永磁同步電機以其體積小、結構簡單等特點在工農業、日常生活以及許多高科技中迅速得到了廣泛的應用。因此,研究設計高精度、高性能的永磁同步電機成為現代電伺服驅動系統的一個發展趨勢。 伺服驅動器按照功能特征可分為功率板和控制板兩個獨立的模塊,本文在分析交流永磁同步電機控制性能的基礎上分別對控制單元和功率驅動單元進行了具體的設計。控制單元作為伺服系統的核心,要求有較高的性能,為此,論文采用意法半導體推出的STM32作為控制核心芯片。它是基于ARM先進架構的Cortex-M3為內核的32位微處理器,主頻可高達72 MHz。強大
[單片機]
磁場定向控制(FOC)原理分析
前言 做永磁同步電機控制繞不開FOC,本章節主要介紹FOC控制的基本原理、坐標變換以及永磁同步電機在同步旋轉坐標系下的數學模型,并通過Matlab/Simulink進行永磁同步電機FOC控制算法的仿真分析。 一、FOC的基本原理 磁場定向控制(Field-Oriented Control,FOC)系統的基本思想是:通過坐標變換,在按轉子磁場定向同步旋轉坐標系中,得到等效的直流電動機模型,仿照直流電動機的控制方法控制電磁轉矩與磁鏈,然后將轉子磁鏈定向坐標系中的控制量反變換得到三相坐標系的對應量,以實施控制,具體流程如下圖所示: FOC最重要的原則是:按轉子磁場定向,即保持轉子磁鏈旋轉矢量始終與dq坐標系下的d軸重合,q軸正交
[嵌入式]
 現代永磁同步電機控制原理及MATLAB仿真 (袁雷編著)
現代永磁同步電機控制原理及MATLAB仿真 (袁雷編著) 射頻電路設計
射頻電路設計













 京公網安備 11010802033920號
京公網安備 11010802033920號