



1 前言
傳統CAN 采用事件觸發消息傳輸機制,CSMA/ CD+ AMP( Carrier-Sense Mult iple Access w ith Co llision Detect ion and Arbit ration on Message Priorit ies, 載波偵聽、多路訪問、沖突檢測、優先級仲裁) 介質訪問控制機制, 即多個消息同時發送時, 按照消息標識符的優先級順序, 低優先級消息自動退出, 高優先級消息繼續發送。這種介質訪問方式提高了網絡的利用率和高優先級消息的實時性, 但在重負載CAN 中, 低優先級消息經常由于總線沖突而被迫退出發送, 導致低優先級消息傳輸時延長, 且傳輸時延不可預測, 因此, CAN 不適合實時性和可靠性要求特別高或有安全性要求的場合, 如汽車電子鐘的X-by-w ir e( 線控技術) 。為此國外有專家自2000 年起研究時間觸發機制的CAN --TT CAN。2004 年國際標準化組織將TT CAN 制定為ISO 11898-4國際標準。
2 什么是TTCAN?
TT CA N 是CAN 的高層協議, 其數據鏈路層需要幀起始時刻信息。T TCAN 在CAN 的物理層和數據鏈路層基礎上, 通過調度表實現網路上節點的分時同步通信。網路上各節點取得同步后, 消息只能根據調度表在規定的時間隙傳輸, 避免了消息傳輸的沖突、仲裁,消息傳輸時延短, 且可預知。具體介紹請參考ISO11898-4。
3 STM32中的TTCAN實現
3.1 開啟TTCAN模式
STM32是通過主控制寄存器(CAN_MCR)的TTCM位來控制TTCAN模式的使能開關的。CAN_MCR寄存器如下所示:
地址偏移量: 0x00
復位值: 0x0001 0002

圖1
| 位31:16 | 保留,硬件強制為0。 |
| 位15 | RESET: bxCAN 軟件復位 0: 本外設正常工作; 1: 對bxCAN進行強行復位,復位后bxCAN進入睡眠模式(FMP位和CAN_MCR寄存器被初始化為其復位值)。此后硬件自動對該位清0。 |
| 位14:8 | 保留,硬件強制為0。 |
| 位7 | TTCM: 時間觸發通信模式 0: 禁止時間觸發通信模式; 1: 允許時間觸發通信模式。 |
| 位6 | ABOM: 自動離線(Bus-Off)管理 該位決定CAN硬件在什么條件下可以退出離線狀態。 0: 離線狀態的退出是在,軟件對CAN_MCR寄存器的INRQ位進行置1隨后清0后,一旦硬件檢測到128次11位連續的隱性位,就退出離線狀態; 1: 一旦硬件檢測到128次11位連續的隱性位,自動退出離線狀態。 |
| 位5 | AWUM: 自動喚醒模式 該位決定CAN處在睡眠模式時由硬件還是軟件喚醒 0: 睡眠模式通過清除CAN_MCR寄存器的SLEEP位,由軟件喚醒; 1: 睡眠模式通過檢測CAN報文,由硬件自動喚醒。喚醒的同時,硬件自動對CAN_MSR寄存器的SLEEP和SLAK位清0 。 |
| 位4 | NART: 禁止報文自動重傳 0: 按照CAN標準,CAN硬件在發送報文失敗時會一直自動重傳直到發送成功; 1: CAN報文只被發送1次,不管發送的結果如何(成功、出錯或仲裁丟失)。 |
| 位3 | RFLM: 接收FIFO鎖定模式 0: 在接收溢出時FIFO未被鎖定,當接收FIFO的報文未被讀出,下一個收到的報文會覆蓋原有的報文; 1: 在接收溢出時FIFO被鎖定,當接收FIFO的報文未被讀出,下一個收到的報文會被丟棄。 |
| 位2 | TXFP: 發送FIFO優先級 當有多個報文同時在等待發送時,該位決定這些報文的發送順序 0: 優先級由報文的標識符來決定; 1: 優先級由發送請求的順序來決定。 |
| 位1 | SLEEP: 睡眠模式請求 軟件對該位置1可以請求CAN進入睡眠模式,一旦當前的CAN活動(發送或接收報文)結束,CAN就進入睡眠。 軟件對該位清0使CAN退出睡眠模式。 當設置了AWUM位且在CAN Rx信號中檢測出SOF位時,硬件對該位清0。 在復位后該位被置1-CAN在復位后處于睡眠模式。 |
| 位0 | INRQ: 初始化請求 軟件對該位清0可使CAN從初始化模式進入正常工作模式:當CAN在接收引腳檢測到連續的11個隱性位后,CAN就達到同步,并為接收和發送數據作好準備了。為此,硬件相應地對CAN_MSR寄存器的INAK位清0。 軟件對該位置1可使CAN從正常工作模式進入初始化模式:一旦當前的CAN活動(發送或接收)結束,CAN就進入初始化模式。相應地,硬件對CAN_MSR寄存器的INAK位置1。 |
如上,只需要將CAN_MCR寄存器的TTCM位置1則開啟了TTCAN模式。此時STM32的CAN模式以TTCAN模式進行通信。
STM32F20x的固件庫對應開啟TTCAN模式的接口為:
/**
* @brief Enables or disables the CAN Time TriggerOperation communication mode.
* @note DLC must be programmed as 8 in order Time Stamp (2 bytes) to be
* sent over the CAN bus.
* @param CANx: where x can be 1 or 2 to to select the CAN peripheral.
* @param NewState: Mode new state. This parameter can be: ENABLE or DISABLE.
* When enabled, Time stamp (TIME[15:0]) value is sent in the last two
* data bytes of the 8-byte message: TIME[7:0] in data byte 6 and TIME[15:8]
* in data byte 7.
* @retval None
*/
void CAN_TTComModeCmd(CAN_TypeDef* CANx, FunctionalState NewState);
或者在初始化CAN_Init時,將CAN_InitTypeDef的成員CAN_TTCM使能。
3.2 開啟時間戳
在TTCAN模式下,CAN硬件的內部定時器被激活,并且被用于產生發送與接收郵箱的)時間戳,分別存儲在CAN_RDTxR/CAN_TDTxR寄存器中。內部定時器在每個CAN位時間累加。內部定時器在接收和發送的幀起始位的采樣點位置被采樣,并生成時間戳。如下:
發送郵箱時間戳:

圖2
如上圖:在TTCAN模式下,TIME[15:0]將保留SOF的時間戳。
若通過將TGT位置1則開啟了時間戳,此時TIME[15:0]將保存了在發送該報文SOF的時刻,16位定時器的值。同時,在發送長度為8的報文中,時間戳TIME[15:0]是最后2個發送的字節:TIME[7:0]作為第7個字節,TIME[15:8]為第8個字節,它們替換了寫入CAN_TDHxR[31:16]的數據(DATA6[7:0]和DATA7[7:0])。為了把時間戳的2個字節發送出去,DLC必須編程為8。
在源碼中開啟此功能,修改CAN_TypeDef的sTxMailBox[3]的RDTR寄存器。
接收郵箱時間戳:
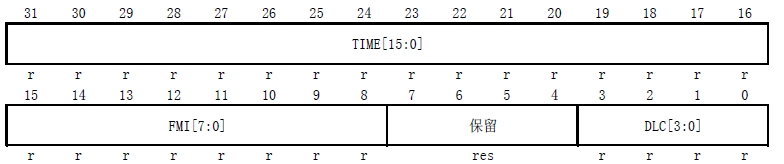
圖3
在TTCAN模式下,接收郵箱數據長度和時間戳寄存器的TIME[15:0]記錄接收到的報文的SOF時間戳。
參考文章:http://blog.csdn.net/flydream0/article/details/8167118
上一篇:stm32_can錯誤中斷 清除重點
下一篇:STM32學習總結——SMT32基本知識
推薦閱讀
史海拾趣

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 SW-262PIN
SW-262PIN- 是德科技感恩月直播已結束|高速示波器基礎與是德新品示波器解析
- “泰”想開車智能篇(下):新一代智能汽車智能化
- 意法半導體工業峰會2023即將開啟!報名、參會均有禮!
- 閱讀羅徹斯特電子停產半導體器件解決方案,答題贏取京東卡啦!
- DigiKey應用探索站重磅上線!潮流應用,硬核技術探秘,N多干貨,一站get!
- 有獎直播 | 瑞薩新一代視覺 AI MPU 處理器 RZ/V2H:高算力、低功耗、實時控制
- 有獎直播:安森美光伏和儲能產品介紹
- 村田RFID知識有獎問答 雙重好禮等你來挑戰
- ADI有獎下載活動之6 ADI基于IEC61850的智能電子設備(IED)系統解決方案
- ublox無線開發板EVK-NINA-B400免費申請







 京公網安備 11010802033920號
京公網安備 11010802033920號