


步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號,電機(jī)則轉(zhuǎn)過一個(gè)步距角。這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期性的誤差而無累積誤差等特點(diǎn)。使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)來控制變的非常的簡單。
正常情況下,步進(jìn)電機(jī)轉(zhuǎn)過的總角度和輸入的脈沖數(shù)成正比;連續(xù)輸入一定頻率的脈沖時(shí),電動(dòng)機(jī)的轉(zhuǎn)速與輸入脈沖的頻率保持嚴(yán)格的對應(yīng)關(guān)系,不受電壓波動(dòng)和負(fù)載變化的影響。由于步進(jìn)電動(dòng)機(jī)能直接接收數(shù)字量的輸入,所以特別適合于微機(jī)控制。
二、步進(jìn)電機(jī)的工作原理
步進(jìn)電機(jī)的工作就是步進(jìn)轉(zhuǎn)動(dòng),其功用是將脈沖電信號變換為相應(yīng)的角位移或是直線位移,就是給一個(gè)脈沖信號,電動(dòng)機(jī)轉(zhuǎn)動(dòng)一個(gè)角度或是前進(jìn)一步。步進(jìn)電機(jī)的角位移量與脈沖數(shù)成正比,它的轉(zhuǎn)速與脈沖頻率成正比,在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號,電機(jī)則轉(zhuǎn)過一個(gè)步距角。
如下所示的步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直流電源供電。只要對步進(jìn)電機(jī)的各相繞組按合適的時(shí)序通電,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動(dòng)。
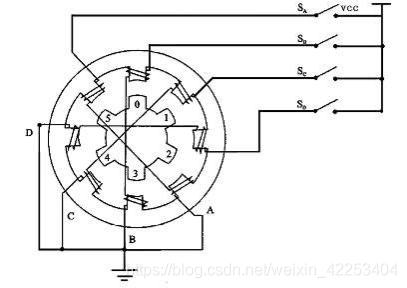
開始時(shí),開關(guān)SB接通電源,SA、SC、SD斷開,B相磁極和轉(zhuǎn)子0、3號齒對齊,同時(shí),轉(zhuǎn)子的1、4號齒就和C、D相繞組磁極產(chǎn)生錯(cuò)齒,2、5號齒就和D、A相繞組磁極產(chǎn)生錯(cuò)齒。
當(dāng)開關(guān)SC接通電源,SB、SA、SD斷開時(shí),由于C相繞組的磁力線和1、4號齒之間磁力線的作用,使轉(zhuǎn)子轉(zhuǎn)動(dòng),1、4號齒和C相繞組的磁極對齊。而0、3號齒和A、B相繞組產(chǎn)生錯(cuò)齒,2、5號齒就和A、D相繞組磁極產(chǎn)生錯(cuò)齒。依次類推,A、B、C、D
四相繞組輪流供電,則轉(zhuǎn)子會(huì)沿著A、B、C、D方向轉(zhuǎn)動(dòng)。
當(dāng)電機(jī)繞組通電時(shí)序?yàn)锳-AB-B-BC-C-CD-D-DA時(shí)為正轉(zhuǎn),通電時(shí)序?yàn)镈A-D-CD-C-BC-B-AB-A時(shí)為反轉(zhuǎn)。
三、步進(jìn)電機(jī)的指標(biāo)理解
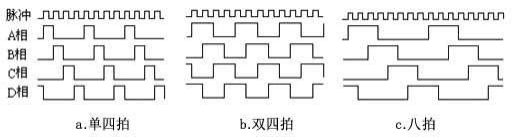
步進(jìn)電機(jī)有分靜態(tài)指標(biāo)和動(dòng)態(tài)指標(biāo),其中最讓我懵逼的是齒距角和步距角的關(guān)系,網(wǎng)上對齒距角和步距角的解釋有點(diǎn)混亂。我個(gè)人的理解是,齒距角是轉(zhuǎn)子上的小齒之間的間距角,步距角(步進(jìn)角)是轉(zhuǎn)子走過一步(一拍)的間距角,一個(gè)齒距角分幾步走完就叫幾拍。
關(guān)于轉(zhuǎn)子齒數(shù),一般情況下,三相為40齒,四相為50齒,五相為48/50齒。
四、硬件設(shè)計(jì)
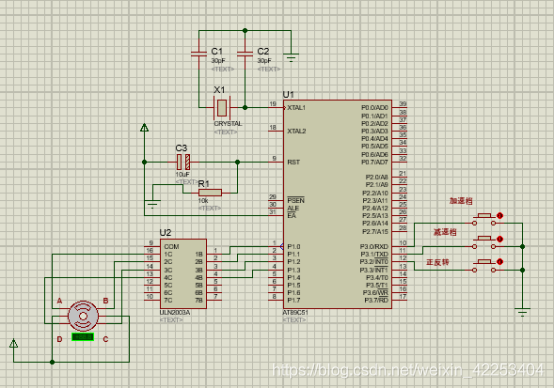
12V電壓給步進(jìn)電機(jī)供電,5V電壓則給單片機(jī)供電。利用P1口作步進(jìn)電機(jī)的控制端口,通過達(dá)林頓陣列ULN2003A驅(qū)動(dòng)步進(jìn)電機(jī)。畫圖有些匆忙,ULN2003A的COM端懸空,沒有保護(hù)輸出,應(yīng)該接電源正。
P3.0-P3.2分別接按鍵K1-K3,其中K1為加速按鍵,K2為減速按鍵,K3為正反轉(zhuǎn)控制按鍵,要求速度7檔(1-7)可調(diào),加減速各設(shè)3檔,開機(jī)及復(fù)位時(shí)位于4檔,要求每檔速度變化明顯。
五、軟件設(shè)計(jì)
#include #define uint unsigned int #define uchar unsigned char sbit inc_key=P3^0;//加鍵 sbit dec_key=P3^1;//減鍵 sbit chg_key=P3^2;//轉(zhuǎn)向控制鍵 //A→AB→B→BC→C→CD→D→DA uchar code eightStep[] = {0x0d, 0x09, 0x0b, 0x03, 0x07, 0x06,0x0e,0x0c}; uchar k=0;//第幾檔 //正反轉(zhuǎn)標(biāo)志位,1正轉(zhuǎn),0反轉(zhuǎn) bit rotaFlag = 1; //*********************************延時(shí)函數(shù)********************************* void delay_ms(uint x) { uint a,b; for(a=x;a>0;a--) for(b=110;b>0;b--); } //*********************************加函數(shù)********************************* void checkInc(void) { if(inc_key==0)//檢測加按鍵 { delay_ms(1);//消抖 if(inc_key==0) { while(!inc_key);//檢測松手 k++; if(k>6)k=0; } } } //*********************************減函數(shù)********************************* void checkDec(void) { if(dec_key==0)//檢測減按鍵 { delay_ms(1); if(dec_key==0) { while(!dec_key); k--; if(k<0)k=6; } } } //*********************************主函數(shù)********************************* void main(void) { char i=0;//第幾拍 IT0 = 1; //外部中斷0,邊沿觸發(fā) EX0 = 1; EA = 1; while(1) { //檢測檔位是否改變 checkInc(); checkDec(); switch(k) { case 0:P1 = eightStep[i];delay_ms(800);break;//1擋 慢 case 1:P1 = eightStep[i];delay_ms(500);break;//2擋 case 2:P1 = eightStep[i];delay_ms(200);break;//3擋 case 3:P1=0x00;break;//4擋 停止 case 4:P1=eightStep[i];delay_ms(100);break;//5擋 case 5:P1=eightStep[i];delay_ms(50);break;//6擋 case 6:P1=eightStep[i];delay_ms(5);break;//7擋 快 } if(k!=3) { if (rotaFlag)//正 { i++; if(i>7)i=0; } else//反 { i--; if(i<0)i=7; } } } } void Int0(void) interrupt 0 { if(chg_key==0)//檢測轉(zhuǎn)向控制按鍵 { rotaFlag = !rotaFlag;//改變轉(zhuǎn)向 } } 六、實(shí)驗(yàn)小結(jié) 本設(shè)計(jì)作為實(shí)驗(yàn)作業(yè),正反轉(zhuǎn)的控制只設(shè)置成了人為觸發(fā)的狀態(tài)切換;5V供單片機(jī),12V驅(qū)動(dòng)步進(jìn)電機(jī);通過簡單的延時(shí)長短改變轉(zhuǎn)速大小,調(diào)速效果不太明顯,可以通過設(shè)置定時(shí)器與轉(zhuǎn)速相關(guān)參數(shù)進(jìn)一步完善。其中有個(gè)小坑,unsigned char變量影響了反轉(zhuǎn),會(huì)減到為負(fù)值,改成char變量就沒問題了。
上一篇:51 單片機(jī) EEPROM小結(jié)(FLASH)
下一篇:基于51單片機(jī)直流電機(jī)PWM調(diào)速設(shè)計(jì)
推薦閱讀
史海拾趣

設(shè)計(jì)資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問題解析

- Microchip 升級數(shù)字信號控制器(DSC)產(chǎn)品線 推出PWM 分辨率和 ADC 速度業(yè)界領(lǐng)先的新器件
- 意法半導(dǎo)體STM32MP23x:突破成本限制的工業(yè)AI應(yīng)用核心
- 意法半導(dǎo)體推出用于匹配遠(yuǎn)距離無線微控制器STM32WL33的集成的匹配濾波芯片
- ESP32開發(fā)板連接TFT顯示屏ST7789跳坑記
- 如何讓ESP32支持analogWrite函數(shù)
- LGVL配合FreeType為可變字體設(shè)置字重-ESP32篇
- 使用樹莓派進(jìn)行 ESP32 Jtag 調(diào)試
- ESP32怎么在SPIFFS里面存儲(chǔ)html,css,js文件,以及網(wǎng)頁和arduino的通訊
- ESP32 freeRTOS使用測試







 E3JK-5S3
E3JK-5S3- 480Wh/kg!湖南久森半固態(tài)金屬鋰負(fù)極電池即將量產(chǎn)
- 中國首條硫化物固體電解質(zhì)量產(chǎn)線正式落地
- QUT開發(fā)出新的LENS系統(tǒng) 可以讓機(jī)器人進(jìn)行類似大腦的導(dǎo)航
- 毫米波雷達(dá)裝機(jī)量分析:毫米波雷達(dá)裝車量持續(xù)攀升,大陸和博世占據(jù)60%以上市場份額
- TDK推出適用于車載濾波器的同軸電纜供電電感器
- 大摩給“人形機(jī)器人100”清單注入新思路
- 行家預(yù)判:2025年車載Mini LED反超OLED
- 2025數(shù)智未來峰會(huì):深度解讀AI賦能工業(yè)的趨勢與實(shí)踐
- 工業(yè)自動(dòng)化中的Raspberry Pi:簡化經(jīng)濟(jì)實(shí)惠的邊緣計(jì)算
- 意法半導(dǎo)體宣布擴(kuò)大在新加坡的“Lab-in-Fab”廠內(nèi)實(shí)驗(yàn)室合作項(xiàng)目
- Littelfuse第4期:新型車載以太網(wǎng)保護(hù)
- 來翻牌吧!解鎖示波器的N種玩法
- 聊聊你眼中的仙童,超值極品拿到手!
- Keysight 有獎(jiǎng)直播 | 基于數(shù)字孿生的軟件工具,助力射頻子系統(tǒng)驗(yàn)證
- TI原裝MSP430 LaunchPad千人大團(tuán)購!
- 得捷第二季Follow me第2期來襲,一起解鎖功能強(qiáng)大且靈活的【Arduino UNO R4 WiFi】
- ADI 全新技術(shù)資料集錦
- 【EE團(tuán)】搶先體驗(yàn) ST最新STM32F0308-DISCOVERY開發(fā)工具!
- DigiKey 應(yīng)用探索站 | 無線技術(shù)盛宴第二趴
- 有獎(jiǎng)直播報(bào)名:TI DLP®技術(shù)在汽車行業(yè)的創(chuàng)新應(yīng)用——增強(qiáng)型抬頭顯示
- 如何在嘈雜的環(huán)境中改善EV/HEV電池的健康狀況
- 讓制造更輕松,OPEN MIND全新 hyperMILL CAD/CAM 套件問市
- 消息人士:劉作虎是一加CEO 同時(shí)任OPPO產(chǎn)品體驗(yàn)官
- Redmi 9國行官宣:6月24日開始預(yù)售
- 臺(tái)媒:蘋果最快2021年推出折疊iPhone,搭載了雙屏幕
- 高云半導(dǎo)體與山大共建FPGA先進(jìn)設(shè)計(jì)與創(chuàng)新應(yīng)用聯(lián)合實(shí)驗(yàn)室
- 意法半導(dǎo)體600V / 3.5A全橋系統(tǒng)級封裝—PWD5F60
- 第15屆鄭州機(jī)床展助力智能制造產(chǎn)業(yè)大格局
- 2019鄭州工博會(huì)市場宣傳勢頭強(qiáng)勁
- 兆易創(chuàng)新聯(lián)手電子分銷商Digi-Key,助力NOR Flash蓬勃發(fā)展
- 全國大學(xué)生電子設(shè)計(jì)競賽經(jīng)驗(yàn)交流 ---- 【高頻無線電類】
- 硬盤MP3播放器-MEGA128-VS1001K-USB-遙控-LCD-ICCAVR代碼-硬盤-支持FAT32-單面PCB
- 招兼職VMware講師
- HC-SR04中STC11單片機(jī)實(shí)現(xiàn)程序
- 曬WEBENCH設(shè)計(jì)的過程+交流耦合反向放大器(第二彈)
- 電子工程師 找工作 自述 看看我能拿多少錢
- 忙活兩個(gè)多月終于完工了 收尾了 哈哈
- esp8266
- 路燈肯定從沒想過,居然會(huì)如此重要,,,,
- 我設(shè)計(jì)了2500MHz~2510MHz的雷達(dá),請問這個(gè)頻段是免費(fèi)的自由頻段嗎?







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號