

序有詳細注釋。
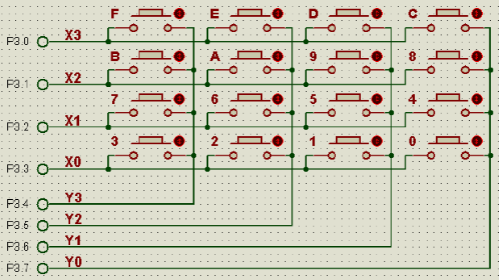
仿真原理圖如下
/*******************************************************************************
* 實 驗 名: 步進電機實驗
* 使用的IO: 電機用P1口,鍵盤使用P2.0、P2.1、P2.2、P2.3、P2.4、P2.5
* 按鍵功能:K1;正轉 K2;反轉 K3;低速轉動 K4;高速轉動 K5:電機切換 K6;停止
* 實驗效果: 按下K1鍵,順時針轉,按下K2鍵,逆時針轉,按下K3鍵,低速,按下K4鍵,高速。
按下K5鍵,轉動的電機停止,并切換到控制另一個電機
按下K6鍵,轉動的電機停止,按下K1或K2時,剛才停止的電機繼續轉動
*******************************************************************************/
#include "reg52.h"
//電機IO
#define GPIO_MOTOR P1 //宏定義 對端口進行操作,定義電機接口為P1
//sbit F1 = P1^0;
//sbit F2 = P1^1;
//sbit F3 = P1^2;
//sbit F4 = P1^3;
//sbit F5 = P1^4;
//sbit F6 = P1^5;
//sbit F7 = P1^6;
//sbit F8 = P1^7; //另種操作,位操作,定義電機接口為P1.0~p1.7
//按鍵IO
sbit K1=P2^0; //正轉
sbit K2=P2^1; //反轉
sbit K3=P2^2; // 減速
sbit K4=P2^3; // 加速
sbit K5=P2^4; // 電機切換
sbit K6=P2^5; // 停止
unsigned char code FFW_X[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反轉順序
unsigned char code FFZ_X[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正轉順序
unsigned char code FFW_Y[8]={0x1f,0x3f,0x2f,0x6f,0x4f,0xcf,0x8f,0x9f}; //Y反轉順序
unsigned char code FFZ_Y[8]={0x9f,0x8f,0xcf,0x4f,0x6f,0x2f,0x3f,0x1f}; //Y正轉順序
unsigned char Direction,Speed,X_Y=0,stop=0; // Direction 轉向標志位,Speed 延時函數的參數,通過改變它大小來控制電機轉速
//X_Y 電機的參數 X_Y=0為Y電機 X_Y=1為X電機
void Delay(unsigned int t); //stop為控制電機停止的標志位,但它為1時,電機停止
void Motor(); //電機旋轉函數
/*******************************************************************************
* 函 數 名 : main
* 函數功能 : 主函數
* 輸 入 : 無
* 輸 出 : 無
*******************************************************************************/
void main(void)
{
unsigned char i;
Speed=30; //Speed 延時函數的參數,通過改變它大小來控制電機轉速
while(1)
{
/********************檢測按鍵K1是否按下***********************/
if(K1==0) //檢測按鍵K1是否按下
{
Delay(1); //消除抖動
if(K1==0)
{
Direction=1; //Direction 轉向標志位,為1時為正轉
stop=0; //按下K1時,對stop停止標志位清零,如果之前按下停止鍵,清零之后才能啟動
}
while((i<200)&&(K1==0))//檢測按鍵是否松開
{
Delay(1);
i++;
}
i=0;
}
/********************檢測按鍵K2是否按下***********************/
if(K2==0) //檢測按鍵K2是否按下
{
Delay(1); //消除抖動
if(K2==0)
{
Direction=2; //Direction 轉向標志位,為2時為反轉
stop=0; //按下K1時,也對stop停止標志位清零,如果之前按下停止鍵,清零之后才能啟動
}
while((i<200)&&(K2==0))//檢測按鍵是否松開
{
Delay(1);
i++;
}
i=0;
}
/********************檢測按鍵K3是否按下***********************/
if(K3==0)//檢測按鍵K3是否按下
{
Delay(1);//消除抖動
if(K3==0)
{
Speed=60; //Speed 延時函數的參數,通過改變它大小來控制電機轉速
//87行代碼定義Speed=30;但按鍵K3按下后,Speed=60,這時轉速就會降下來
}
while((i<200)&&(K3==0))//檢測按鍵是否松開
{
Delay(1);
i++;
}
i=0;
}
/********************檢測按鍵K3是否按下***********************/
if(K4==0) //檢測按鍵K4是否按下
{
Delay(1); //消除抖動
if(K4==0)
{
Speed=20; //Speed 延時函數的參數,通過改變它大小來控制電機轉速
//87行代碼定義Speed=30;但按鍵K4按下后,Speed=20,這時轉速就會降下來升上去
}
while((i<200)&&(K4==0))//檢測按鍵是否松開
{
Delay(1);
i++;
}
i=0;
}
if(K5==0)//檢測按鍵K1是否按下
{
Delay(1);//消除抖動
if(K5==0)
{
Direction=0; //X_Y 電機的參數 X_Y=0為Y電機 X_Y=1為X電機
if(X_Y==0) //當切換電機時,對Direction=0;對標志位清零,防止上個電機的轉向影響本次所控電機
X_Y=1;
else
X_Y=0;
}
while((i<200)&&(K5==0))//檢測按鍵是否松開
{
Delay(1);
i++;
}
i=0;
}
if(K6==0)//檢測按鍵K1是否按下
{
Delay(1);//消除抖動
if(K6==0)
{
stop=1; //stop為控制電機停止的標志位,但它為1時,電機停止
}
while((i<200)&&(K6==0))//檢測按鍵是否松開
{
Delay(1);
i++;
}
i=0;
}
Motor();
}
}
/*******************************************************************************
* 函 數 名: Motor
* 函數功能: 電機旋轉函數
* 輸 入: 無
* 輸 出: 無
*******************************************************************************/
void Motor()
{
unsigned char i;
for(i=0;i<8;i++)
{
if(Direction==1&&X_Y==0&&stop==0) //正轉&Y電機&電機沒按下停止
GPIO_MOTOR = FFW_Y[i]&0xf0;//取數據,‘&’按位與
if(Direction==2&&X_Y==0&&stop==0) //反轉&Y電機&電機沒按下停止
GPIO_MOTOR = FFZ_Y[i]&0xf0;
if(Direction==1&&X_Y!=0&&stop==0) //正轉&X電機&電機沒按下停止
GPIO_MOTOR = FFW_X[i]&0x0F;//取數據
if(Direction==2&&X_Y!=0&&stop==0) //反轉&X電機&電機沒按下停止
GPIO_MOTOR = FFZ_X[i]&0x0f;
Delay(Speed); //調節轉速
}
}
/*******************************************************************************
* 函 數 名 : Delay
* 函數功能 : 延時
* 輸 入 : t
* 輸 出 : 無
*******************************************************************************/
void Delay(unsigned int t)
{
unsigned int k;
while(t--)
{
for(k=0; k<80; k++)
{ }
}
}
上一篇:基于單片機的火災報警器設計
下一篇:C51單片機利用74hc138擴展流水燈的仿真電路圖+程序
推薦閱讀
史海拾趣
隨著市場競爭的加劇,思博科技意識到只有不斷創新才能在市場中立足。于是,公司加大了研發投入,不斷推出具有創新性的產品。其中,一款名為“MaxPower”的高效能電源芯片在市場上引起了廣泛關注。這款芯片不僅性能卓越,而且具有極高的能效比,為客戶節省了大量能源成本。這一創新產品的成功推出,使思博科技在行業中樹立了良好的口碑。
為了滿足全球市場的需求,BK Precision開始實施全球化戰略。公司不僅在美國本土設立了多個辦事處和研發中心,還在歐洲和亞洲等地建立了分支機構。通過與國際授權分銷商的合作,BK Precision成功地將產品推向全球市場,并贏得了眾多國際客戶的信賴。同時,公司還積極參與國際電子行業的展會和交流活動,提升品牌知名度和影響力。
博流智能科技始創于2016年,由一群來自硅谷頂級芯片公司的創始團隊組成。他們憑借在移動通訊及物聯網技術領域的深厚積累,以及對未來科技趨勢的敏銳洞察,決定投身于新一代物聯網集成電路芯片的研發。初創時期,公司面臨著資金、技術和市場等多重挑戰,但團隊憑借堅定的信念和不懈的努力,逐步克服了困難,為公司的長遠發展奠定了堅實基礎。
在產品研發取得突破的同時,EM Devices Corporation也積極拓展市場,尋求與國際企業的合作。公司參加了多個國際電子展,展示了自己的產品和技術實力。通過與國外企業的交流與合作,公司不僅獲得了更多的市場機會,還學習到了先進的生產和管理經驗。這些經驗為公司后續的發展奠定了堅實的基礎。
EM Devices Corporation始終將產品質量放在首位。公司建立了一套嚴格的質量管理體系,對生產過程中的每一個環節都進行嚴格的監控和檢測。同時,公司還不斷引入先進的生產設備和工藝,提高產品的生產效率和質量。此外,公司還鼓勵員工提出改進意見和建議,以便及時發現并解決問題。這種持續改進的精神使得EM Devices Corporation的產品在市場上始終保持著良好的口碑。
|
接觸電阻是對通過閉合觸點對的電流的阻抗。這種類型的測量是針對例如連接器、繼電器和開關這樣的器件進行的。該電阻通常非常小,范圍從微歐到幾個毫歐,因此需要采用4線測量法。可編程掃描儀通過將一組測試儀器切換至多個觸點,大大縮短了測量時間 ...… 查看全部問答∨ |
|
|
原文: 如果,我們不去控制我們自己的大腦,甚至根本就沒有意識到我們可以控制我們 的大腦,我們就只能被我們的大腦所控制。讓我們先描述一個日常生活中特別常 見的場景。 或許是因為考試臨近,或許是因為工作需要,你現在必須把一本書讀完。 ...… 查看全部問答∨ |
|
|
wce5 基于mfc的對話框程序, 啟動的時候如何讓其隱藏?嘗試了windows的方法不支持啊。 如題。求解。 wce5 基于mfc的對話框程序, 啟動的時候如何讓其隱藏?嘗試了windows的方法不支持啊。 總是要閃一下才隱藏。… 查看全部問答∨ |
驅動程序啟動失敗,在[HKEY_LOCAL_MACHINE\Drivers\Active]下,DLL的號碼并不連貫: 我寫了一個GPIO的驅動,可以順利編譯并集成到OS中,查看 啟動后查看[HKEY_LOCAL_MACHINE\\Drivers\\BuiltIn]下的DLL的信息很正常。但是DLL沒有被啟動 查看 [HKEY_LOCAL_MACHINE\\Drivers\\Active]下,DLL的號碼并不連貫: 9后面的就是11了 ...… 查看全部問答∨ |
|
在自己的類中建立一個兼容HDC設備,準備把文字繪制在上面,需要時復制到當前的窗口中,但在上面繪圖沒問題,寫文字時報183錯(當文件已存在時,無法創建該文件。 ),為什么?程序片斷如下: 說明:hdc是當前窗口傳下來的HDC,m_hdc是自己類中的 ...… 查看全部問答∨ |
請教高手 調試液晶1602c時老是不能正確顯示,顯示單個字符A時只能顯示出 ||,然后兩個橫杠就沒了,請問是什么原因。 另外看很多例子檢查液晶忙時都檢查都檢查數據口第8位,并且先送0FFH到數據口,為什么?不送0FFH可以 ...… 查看全部問答∨ |
|
內容簡介 本書講述了TMS320F2812芯片的基本特點、硬件結構、內部功能模塊的基本原理等內容,并在結合應用實例的基礎上詳細闡述了各功能模塊的應用。同時專門針對電機控制領域的應用,詳細介紹了基于TMS320F2812數字信號處理器的永磁同步電機控制系 ...… 查看全部問答∨ |

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 S8380
S8380






 京公網安備 11010802033920號
京公網安備 11010802033920號