


Altium Designer畫的L298N電機驅動器電路原理圖和PCB圖如下:

制作出來的實物圖如下:
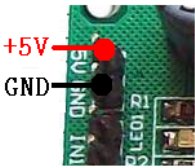
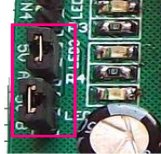
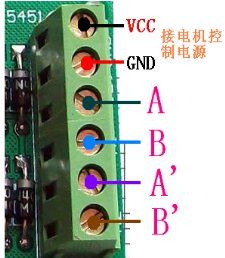
接線說明資料:


附件中包含如下單片機控制例程:
例一、步進電機正轉兩相四拍程序
例七、四相步進電機正轉四拍程序
例三、步進電機反轉兩相四拍程序
例九、四相步進電機反轉四拍程序
例二、步進電機正轉兩相八拍程序
例五、步進電機兩相四拍調速程序
例八、四相步進電機正轉八拍程序
例六、步進電機兩相八拍調速程序
例十、四相步進電機反轉八拍程序
例十一、四相步進電機四拍調速程序
例十七、步進電機每按一下轉3圈
例十三、四相步進電機八拍調速程序方法二
例十二、四相步進電機八拍調速程序
例十五、步進電機每按一下轉1.8度
例十六、步進電機每按一下轉3.6度
例十四、步進電機分檔控制
例四、步進電機反轉兩相八拍程序
直流電機反轉控制程序
直流電機外接位置開關調速正反轉控制程序
直流電機實現定時正反轉
直流電機正轉控制程序
直流電機調速控制實例
直流電機調速控制程序
這是其中的一個例程:
步進電機兩相八拍調速單片機源程序如下:
////////////////////////匯誠科技////////////////////
///////////////////步進電機調試程序/////////////
#include /*****P1.0=A ;P1.1=B ;P1.2=B' ; P1.3=A'****/ ////////////////////////////////////////////////////////////////////////////////////////////// /*******************************正轉數組**************************************************/ code unsigned char runz[8]={0x0e,0x0c,0x0d,0x09,0x0b,0x03,0x07,0x06}; //兩相四線八拍工作方式 /*******************************反轉數組**************************************************/ code unsigned char runf[8]={0x06,0x07,0x03,0x0b,0x09,0x0d,0x0c,0x0e}; //兩相四線八拍工作方式 unsigned char keycan=0; //鍵值 unsigned char s,i,j,k,z; int y=30;//定義轉動速度,數值越大電機轉速越慢反之則快 sbit P2_0=P2^0;//正轉按鍵 sbit P2_1=P2^1;//反轉按鍵 sbit P2_2=P2^2;//電機加速 sbit P2_3=P2^3;//電機減速 void delay(i)//延時函數 { for(j=0;j } void zrun()// 正轉運行 { for(z=0;z<8;z++) { P1=runz[z]; delay(y); } } void frun()// 反轉運行 { for(z=0;z<8;z++) { P1=runf[z]; delay(y); } } main() { while(1) { if(P2_0==0) //如果電機正轉按鍵按下 { keycan=1; //鍵值等于1 } if(P2_1==0) //如果電機反轉按鍵按下 { keycan=2; //鍵值等于2 } switch (keycan) { case 1: zrun(); //鍵值等于1 正轉 break; case 2: frun(); //鍵值等于2 反轉 break; } if(P2_2==0) // 電機加速 { y+=5; } if(P2_3==0) { // 電機減速 y-=5; } } } L298N電機驅動器使用說明書 注意:本說明書中添加超鏈接的按CTRL并點擊連接,即可看到內容。 實例一:步進電機的控制實例 步進電機是數字控制電機,它將脈沖信號轉變成角位移,即給一個脈沖信號,步進電機就轉動一個角度,因此非常適合于單片機控制。步進電機可分為反應式步進電機(簡稱VR)、永磁式步進電機(簡稱PM)和混合式步進電機(簡稱HB)。 一、步進電機最大特點是: 1、它是通過輸入脈沖信號來進行控制的。 2、電機的總轉動角度由輸入脈沖數決定。 3、電機的轉速由脈沖信號頻率決定。 二、步進電機的驅動電路 根據控制信號工作,控制信號由單片機產生。(或者其他信號源) 如圖:按CTRL并點擊(L298N驅動器與直流電機接線圖) 三、基本原理作用如下: 兩相四拍工作模式時序圖: (1)控制換相順序 1、通電換相這一過程稱為脈沖分配。 例如: 1、兩相四線步進電機的四拍工作方式,其各相通電順序為(A-B-A’-B’)依次循環。《例一、步進電機正轉兩相四拍程序》(通電控制脈沖必須嚴格按照這一順序分別控制A,B相的通斷。) 2、兩相四線步進電機的四拍工作方式,其各相通電順序為: (A-AB-B-BA’-A’-A’B’-B’-B’A) 例二、步進電機正轉兩相八拍程序》依次循環。(出于對力矩、平穩、噪音及減少角度等方面考慮。往往采用八拍工作方式) (2)控制步進電機的轉向 如果給定工作方式正序換相通電,步進電機正轉,如果按反序通電換相,則電機就反轉。如:正轉通電順序是:(A-B-A’-B’ 依次循環。)則反轉的通電順序是:(B‘-A’-B-A依次循環。) 參考下例: 《例三、步進電機反轉兩相四拍程序》 (3)控制步進電機的速度 如果給步進電機發一個控制脈沖,它就轉一步,再發一個脈沖,它會再轉一步。兩個脈沖的間隔越短,步進電機就轉得越快。調整單片機發出的脈沖頻率,就可以對步進電機進行調速。(注意:如果脈沖頻率的速度大于了電機的反應速度,那么步進電機將會出現失步現象)。 參考下例: 《例五、步進電機兩相四拍調速程序》 (4)四相電機的控制程序 如圖:按CTRL并點擊(驅動器控制四相步進電機接線圖) 《例 一 、步進電機正轉兩相四拍程序》 《例七、四相步進電機正轉四拍程序》 《例十二、四相步進電機八拍調速程序》 《例十三、四相步進電機八拍調速程序方法二》 《例十四、步進電機分檔控制》 《例十五、步進電機每按一下轉1.8度》 使用直流/步進兩用驅動器可以驅動兩臺直流電機。分別為M1和M2。引腳A,B可用于輸入PWM脈寬調制信號對電機進行調速控制。(如果無須調速可將兩引腳接5V,使電機工作在最高速狀態,既將短接帽短接)實現電機正反轉就更容易了,輸入信號端IN1接高電平輸入端IN2接低電平,電機M1正轉。(如果信號端IN1接低電平, IN2接高電平,電機M1反轉。)控制另一臺電機是同樣的方式,輸入信號端IN3接高電平,輸入端IN4接低電平,電機M2正轉。(反之則反轉),PWM信號端A控制M1調速,PWM信號端B控制M2調速。 可參考下圖表:
《例四、步進電機反轉兩相八拍程序》
《例六、步進電機兩相八拍調速程序》
《例八、四相步進電機正轉八拍程序》
《例九、四相步進電機反轉四拍程序》
《例十、四相步進電機反轉八拍程序》
《例十一、四相步進電機四拍調速程序》
以下為參考程序:
《例十六、步進電機每按一下轉3.6度》
實例二:直流電機的控制實例



 5.光電隔離(抗干擾)
5.光電隔離(抗干擾)


上一篇:教你使用一個單片機IO口控制RGB彩燈,單總線LED燈使用教程
下一篇:完美搞定keil error C100: unprintable character 0xA3 skipped
推薦閱讀
史海拾趣
面對工業4.0的浪潮,乾坤公司積極響應國家智能制造的號召,開始進行智能制造的轉型。公司引進了先進的自動化設備,對生產線進行了全面升級,實現了生產過程的自動化、信息化和智能化。通過智能制造的轉型,乾坤不僅提高了生產效率,還降低了生產成本,同時提升了產品的一致性和可靠性。這一轉型為乾坤公司的持續發展注入了新的動力,使其在激烈的市場競爭中保持了領先地位。
隨著電子行業的快速發展和市場競爭的加劇,Crowd Supply Inc.也面臨著諸多挑戰。為了保持競爭優勢,公司不斷調整戰略方向,加大在新技術領域的投入。例如,公司近期開始關注物聯網和人工智能等前沿技術的應用,通過整合社區資源和技術優勢,成功開發出了一系列具有市場潛力的新產品。
隨著電子行業的快速發展,CETC意識到單打獨斗難以應對市場的快速變化。于是,公司積極尋求與其他企業的合作,共同推動產業的發展。在與某知名通信設備制造商的合作中,CETC提供了先進的電子元件和解決方案,雙方共同開發出了多款暢銷產品,實現了市場的共贏。這種合作模式不僅提升了CETC的市場競爭力,也促進了整個電子行業的健康發展。
進入21世紀,ERNI繼續深耕連接器技術。他們成功研發出世界上第一個DIN連接器,并隨后發展了各種電路板連接器和輸入/輸出連接器。其中,2mm連接器成為ERNI的明星產品之一。憑借其優越的性能和可靠的品質,ERNI的2mm連接器在國內軍工領域得到廣泛應用,并贏得了廣大客戶的信賴和好評。
倍(DBIC)公司自創立之初,就致力于在電子行業中進行技術創新。公司投入大量資源進行研發,成功推出了一系列具有革命性的產品,如高效能芯片和智能傳感器。這些產品不僅提高了生產效率,還滿足了市場對智能化、高效能電子產品的需求。隨著技術的不斷進步,倍(DBIC)公司逐漸在行業中樹立了技術領先的形象,吸引了眾多合作伙伴和客戶。
|
上海公司招聘以下職位,有興趣請速發簡歷到xinjihr_cn@126.com,或者msn: mouhuitou@hotmail.com,謝謝 ASIC Verfication Engineer: 1)本科以上學歷 2)有3年左右驗證工作背景. 3)熟悉system verilog最好. Process Engineer: 1)本科以上學歷 2) ...… 查看全部問答∨ |
市場上有S3C,TI,Freescale等不同品牌的產品,但是那一款比較適合做消費電子產品,下面我給大家做個分析。S3C的開發板產品價格相對較低,受到很多高校的鐘愛,但是,要知道作為工程師必須使用和了解高端的產品,像這種給高校用來做基礎教育的產品 ...… 查看全部問答∨ |
|
程序要分離系統聲音和按鍵聲音,使兩者互不干擾。 現在系統聲音的設置通過waveOutSetVolume(0, 音量值) 這種情況下,可不可以實現另外做一個音頻的通道,使其不受主音量的干擾,成為按鍵的聲音? 要怎么做才能實現呢? 請指教啊~~~~~謝謝… 查看全部問答∨ |
linux中一個文件都有一個dentry和一個inode,這兩個結構是VFS根據具體文件系統磁盤上的信息在內存中建立的數據結構,我這么理解對吧?我們在mount一個文件系統的時候,系統應該負責建立這些dentry和inode吧?那如果一個磁盤包括的文件數很多,那么內 ...… 查看全部問答∨ |
|
現在有個心片,是一個usb的audio設備 ,我現在可以把她作為一個普通的usb設備讀寫,但是現在有個問題就是希望該設備作為audio 設備來播放音樂,除了控制命令用endpoint1和4來傳外,另外的audio channel怎么指定啊? 謝謝指定一下!… 查看全部問答∨ |
|
|
今天熟悉了一下LM提供的StellarisWare固件庫,感覺跟STM32的固件庫有很大的差異,使用上有點像Windows平臺API函數的意思,使用外設的時候到對應的固件庫看看有啥函數可以用就行了。 &nbs ...… 查看全部問答∨ |
|
|
MCU輸出主時鐘給音頻ADC芯片,讓ADC芯片工作在master 模式,產生standerd philips I2S格式(64FS,FS=48K),但從MCU端看,接收到的數據有錯位情況。 舉例:MCU I2S配置如下,I2S時鐘誤差為0, I2S_InitStructure.I2S_Standard = I2S_Standa ...… 查看全部問答∨ |

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 XC5200-3BG225C
XC5200-3BG225C






 京公網安備 11010802033920號
京公網安備 11010802033920號