



仿真原理圖如下
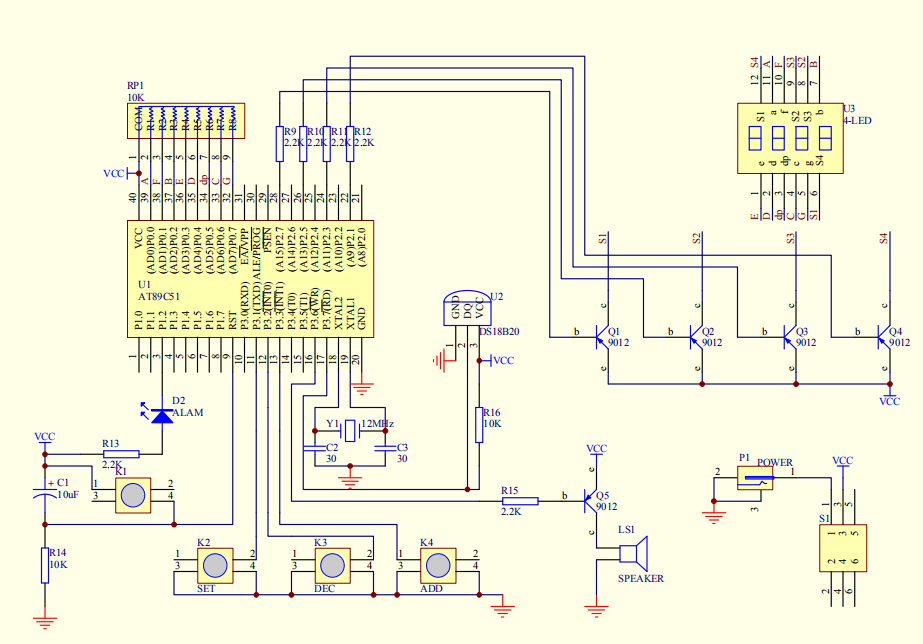
全部資料分享,可設置溫度報警的上下限,5641四位共陽數碼管顯示溫度,自己曾經做的設計,實測可行,提供給有需要的人

單片機源程序如下:
#include #define uint unsigned int #define uchar unsigned char //宏定義 #define SET P3_1 //定義調整鍵 #define DEC P3_2 //定義減少鍵 #define ADD P3_3 //定義增加鍵 #define BEEP P3_6 //定義蜂鳴器 #define ALAM P1_2 //定義燈光報警 #define DQ P3_7 //定義DS18B20總線I/O bit shanshuo_st; //閃爍間隔標志 bit beep_st; //蜂鳴器間隔標志 sbit DIAN = P0^5; //小數點 uchar x=0; //計數器 signed char m; //溫度值全局變量 uchar n; //溫度值全局變量 uchar set_st=0; //狀態標志 signed char shangxian=38; //上限報警溫度,默認值為38 signed char xiaxian=5; //下限報警溫度,默認值為5 //uchar code LEDData[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xff}; uchar code LEDData[]={0x5F,0x44,0x9D,0xD5,0xC6,0xD3,0xDB,0x47,0xDF,0xD7,0xCF,0xDA,0x9B,0xDC,0x9B,0x8B}; //============================================================================================ //====================================DS18B20================================================= //============================================================================================ /*****延時子程序*****/ void Delay_DS18B20(int num) { while(num--) ; } /*****初始化DS18B20*****/ void Init_DS18B20(void) { unsigned char x=0; DQ = 1; //DQ復位 Delay_DS18B20(8); //稍做延時 DQ = 0; //單片機將DQ拉低 Delay_DS18B20(80); //精確延時,大于480us DQ = 1; //拉高總線 Delay_DS18B20(14); x = DQ; //稍做延時后,如果x=0則初始化成功,x=1則初始化失敗 Delay_DS18B20(20); } /*****讀一個字節*****/ unsigned char ReadOneChar(void) { unsigned char i=0; unsigned char dat = 0; for (i=8;i>0;i--) { DQ = 0; // 給脈沖信號 dat>>=1; DQ = 1; // 給脈沖信號 if(DQ) dat|=0x80; Delay_DS18B20(4); } return(dat); } /*****寫一個字節*****/ void WriteOneChar(unsigned char dat) { unsigned char i=0; for (i=8; i>0; i--) { DQ = 0; DQ = dat&0x01; Delay_DS18B20(5); DQ = 1; dat>>=1; } } /*****讀取溫度*****/ unsigned int ReadTemperature(void) { unsigned char a=0; unsigned char b=0; unsigned int t=0; float tt=0; Init_DS18B20(); WriteOneChar(0xCC); //跳過讀序號列號的操作 WriteOneChar(0x44); //啟動溫度轉換 Init_DS18B20(); WriteOneChar(0xCC); //跳過讀序號列號的操作 WriteOneChar(0xBE); //讀取溫度寄存器 a=ReadOneChar(); //讀低8位 b=ReadOneChar(); //讀高8位 t=b; //高8位轉移到t t<<=8; //t數據左移8位 t=t|a; //將t和a按位或,得到一個16位的數 tt=t*0.0625; //將t乘以0.0625得到實際溫度值(溫度傳感器設置12位精度,最小分辨率是0.0625) t= tt*10+0.5; //放大10倍(將小數點后一位顯示出來)輸出并四舍五入 return(t); //返回溫度值 } //===================================================================================== //===================================================================================== //===================================================================================== /*****延時子程序*****/ void Delay(uint num) { while( --num ); } /*****初始化定時器0*****/ void InitTimer(void) { TMOD=0x1; TH0=0x3c; TL0=0xb0; //50ms(晶振12M) } /*****讀取溫度*****/ void check_wendu(void) { uint a,b,c; c=ReadTemperature(); //獲取溫度值 a=c/100; //計算得到十位數字 b=c/10-a*10; //計算得到個位數字 m=c/10; //計算得到整數位 n=c-a*100-b*10; //計算得到小數位 if(m<0){m=0;n=0;} //設置溫度顯示上限 if(m>99){m=99;n=9;} //設置溫度顯示上限 } /*****顯示開機初始化等待畫面*****/ void Disp_init(void) { P0 = ~0x80; //顯示---- P2 = 0x7F; Delay(200); P2 = 0xDF; Delay(200); P2 = 0xF7; Delay(200); P2 = 0xFD; Delay(200); P2 = 0xFF; //關閉顯示 } /*****顯示溫度子程序*****/ void Disp_Temperature(void) //顯示溫度 { P0 = ~0x98; //顯示C P2 = 0x7F; Delay(100); P2=0xff; P0=~LEDData[n]; //顯示個位 P2 = 0xDF; Delay(100); P2=0xff; P0 =~LEDData[m%10]; //顯示十位 DIAN = 0; //顯示小數點 P2 = 0xF7; Delay(100); P2=0xff; P0 =~LEDData[m/10]; //顯示百位 P2 = 0xFD; Delay(100); P2 = 0xff; //關閉顯示 } /*****顯示報警溫度子程序*****/ void Disp_alarm(uchar baojing) { P0 =~0x98; //顯示C P2 = 0x7F; Delay(100); P2=0xff; P0 =~LEDData[baojing%10]; //顯示十位 P2 = 0xDF; Delay(100); P2=0xff; P0 =~LEDData[baojing/10]; //顯示百位 P2 = 0xF7; Delay(100); P2=0xff; if(set_st==1)P0 =~0xCE; else if(set_st==2)P0 =~0x1A; //上限H、下限L標示 P2 = 0xFD; Delay(100); P2 = 0xff; //關閉顯示 } /*****報警子程序*****/ void Alarm() { if(x>=10){beep_st=~beep_st;x=0;} if((m>=shangxian&&beep_st==1)||(m BEEP=0; ALAM=0; } else { BEEP=1; ALAM=1; } } /*****主函數*****/ void main(void) { uint z; InitTimer(); //初始化定時器 EA=1; //全局中斷開關 TR0=1; ET0=1; //開啟定時器0 IT0=1; IT1=1; check_wendu(); check_wendu(); for(z=0;z<300;z++) { Disp_init();


上一篇:一個定時器生成多路PWM波形的原理和方法
下一篇:STC12C5A60S2利用PCA時鐘溢出做的PWM信號
推薦閱讀
史海拾趣
在電子行業中,產品質量和客戶服務是企業生存和發展的關鍵。CCS公司始終堅持質量第一的原則,建立了嚴格的質量管理體系和客戶服務體系。公司從原材料采購到產品生產、銷售等各個環節都進行嚴格的質量控制,確保產品的質量和性能達到客戶的期望。同時,CCS公司還提供了全方位的客戶服務,包括售前咨詢、售后服務和技術支持等,為客戶提供了全方位的支持和幫助。
在全球環保和可持續發展的背景下,DAPAudio也積極響應這一號召。公司投入大量資源用于研發環保型音頻處理器產品,通過采用環保材料和節能技術降低產品對環境的影響。同時,DAPAudio還積極參與社會公益活動,推動音頻行業的可持續發展。
請注意,以上故事均為虛構內容,僅供參考。如需了解DAPAudio公司的真實發展故事,建議查閱相關官方資料或新聞報道。
AUK Contractors Co Ltd深知人才是企業發展的核心。因此,公司一直注重人才培養和團隊建設。通過定期的培訓、交流以及激勵機制,公司吸引并留住了一批批優秀的電子工程師和技術人才。這些人才為公司的發展提供了源源不斷的動力。
ASSMANN WSW components公司的創立源于一個對電子行業充滿熱情的家族。起初,它只是一個小型家族企業,專注于為當地電子市場提供連接器和其他基礎電子元件。然而,憑借其出色的產品質量和專業的服務態度,ASSMANN WSW逐漸贏得了客戶的信任和好評。隨著時間的推移,公司的業務范圍逐漸擴大,不僅在國內市場取得了顯著成績,還開始進軍國際市場。
隨著公司規模的擴大和產品質量的提升,ASSMANN WSW components公司開始積極拓展全球市場。通過與全球知名企業的合作,公司成功打入國際市場,產品遠銷海外。同時,公司還積極參加國際電子展會和交流活動,與全球同行建立了廣泛的合作關系。這些舉措不僅提升了ASSMANN WSW的品牌知名度和影響力,還為公司帶來了更多的商業機會和發展空間。
品質控制一直是Emhiser Research非常重視的方面。公司建立了嚴格的質量管理體系和檢測流程,確保每一件產品都符合高標準的質量要求。同時,公司還注重品牌建設,通過不斷提升產品品質和服務水平來樹立品牌形象。這些努力使得Emhiser Research在客戶中贏得了良好的口碑和信任。
|
Ü 外掛2M~32M的Flash,時間從32—1054秒。掩膜為內置ROM,最長支持400秒(@6K采樣)。采樣率支持6K~22K Ü DAC輸出:13Bit,PWM輸出:12Bit Ü 內置0.5W功放,可直接推動0.5W/8Ω揚聲器 Ü 支持加載MP3/WAV/WMA ...… 查看全部問答∨ |
|
|
ARM處理器上電/復位操作 本問節選自《嵌入式系統Linux內核開發實戰指南(ARM平臺)》一書 ARM處理器上電與復位操作過程類似,都是從處理器的低端復位向量地址0位置讀取第一條指令,由于ARM處理器的異常中斷向量是連續排列的,所 ...… 查看全部問答∨ |
每次重啟電源后開機,cpu、顯卡風扇轉一下就停了,主板無法上電,主板上的LED燈不亮,再按開機鍵就沒有任何反應了,只能再次重啟電源才能復現上述情況。 請問這是怎么回事啊?電源供電不足?還是主板燒了(為什么每次重啟電源后風扇都能轉一下呢) ...… 查看全部問答∨ |
|
這款地鐵應急燈是為應付地鐵突發狀況準備的。當地鐵突然停運,電源切斷的時候,乘客們可以將把手取下,充當應急電筒使用。通過擠按把手上的按鈕,就能夠輕松將把手與帶子分離。當然,只有在地鐵熄燈之后才能啟動這一按鈕。 &n ...… 查看全部問答∨ |
在VHDL中,類屬參數可以在不同層次的模塊間傳遞。可以在頂層修改這些參數,下面各層隨之改變。 verilog中怎么實現這一功能? 謝謝!… 查看全部問答∨ |

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 XC5200-3BG225C
XC5200-3BG225C






 京公網安備 11010802033920號
京公網安備 11010802033920號