仿真原理圖如下
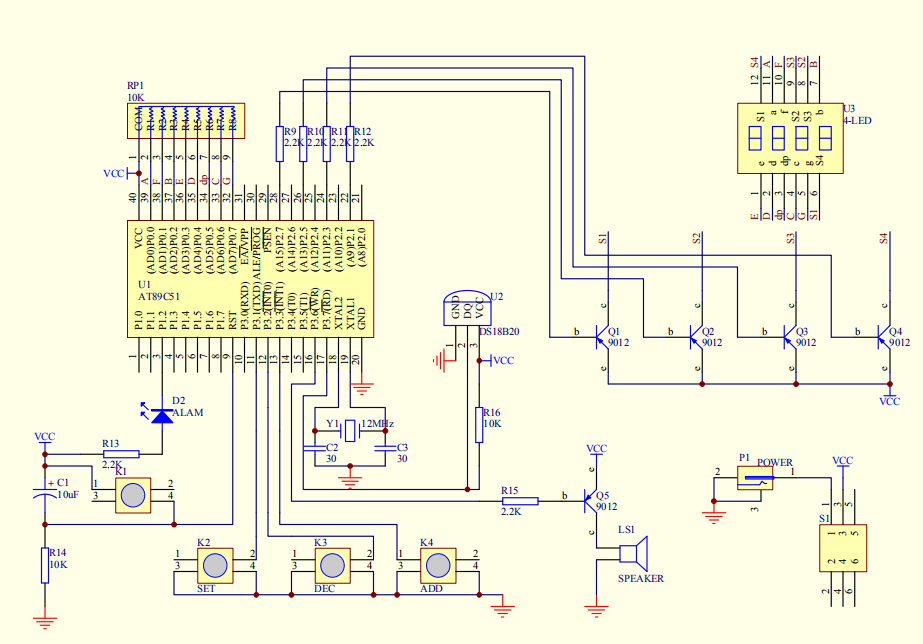
全部資料分享,可設置溫度報警的上下限,5641四位共陽數(shù)碼管顯示溫度,自己曾經(jīng)做的設計,實測可行,提供給有需要的人

單片機源程序如下:
#include #define uint unsigned int #define uchar unsigned char //宏定義 #define SET P3_1 //定義調(diào)整鍵 #define DEC P3_2 //定義減少鍵 #define ADD P3_3 //定義增加鍵 #define BEEP P3_6 //定義蜂鳴器 #define ALAM P1_2 //定義燈光報警 #define DQ P3_7 //定義DS18B20總線I/O bit shanshuo_st; //閃爍間隔標志 bit beep_st; //蜂鳴器間隔標志 sbit DIAN = P0^5; //小數(shù)點 uchar x=0; //計數(shù)器 signed char m; //溫度值全局變量 uchar n; //溫度值全局變量 uchar set_st=0; //狀態(tài)標志 signed char shangxian=38; //上限報警溫度,默認值為38 signed char xiaxian=5; //下限報警溫度,默認值為5 //uchar code LEDData[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xff}; uchar code LEDData[]={0x5F,0x44,0x9D,0xD5,0xC6,0xD3,0xDB,0x47,0xDF,0xD7,0xCF,0xDA,0x9B,0xDC,0x9B,0x8B}; //============================================================================================ //====================================DS18B20================================================= //============================================================================================ /*****延時子程序*****/ void Delay_DS18B20(int num) { while(num--) ; } /*****初始化DS18B20*****/ void Init_DS18B20(void) { unsigned char x=0; DQ = 1; //DQ復位 Delay_DS18B20(8); //稍做延時 DQ = 0; //單片機將DQ拉低 Delay_DS18B20(80); //精確延時,大于480us DQ = 1; //拉高總線 Delay_DS18B20(14); x = DQ; //稍做延時后,如果x=0則初始化成功,x=1則初始化失敗 Delay_DS18B20(20); } /*****讀一個字節(jié)*****/ unsigned char ReadOneChar(void) { unsigned char i=0; unsigned char dat = 0; for (i=8;i>0;i--) { DQ = 0; // 給脈沖信號 dat>>=1; DQ = 1; // 給脈沖信號 if(DQ) dat|=0x80; Delay_DS18B20(4); } return(dat); } /*****寫一個字節(jié)*****/ void WriteOneChar(unsigned char dat) { unsigned char i=0; for (i=8; i>0; i--) { DQ = 0; DQ = dat&0x01; Delay_DS18B20(5); DQ = 1; dat>>=1; } } /*****讀取溫度*****/ unsigned int ReadTemperature(void) { unsigned char a=0; unsigned char b=0; unsigned int t=0; float tt=0; Init_DS18B20(); WriteOneChar(0xCC); //跳過讀序號列號的操作 WriteOneChar(0x44); //啟動溫度轉(zhuǎn)換 Init_DS18B20(); WriteOneChar(0xCC); //跳過讀序號列號的操作 WriteOneChar(0xBE); //讀取溫度寄存器 a=ReadOneChar(); //讀低8位 b=ReadOneChar(); //讀高8位 t=b; //高8位轉(zhuǎn)移到t t<<=8; //t數(shù)據(jù)左移8位 t=t|a; //將t和a按位或,得到一個16位的數(shù) tt=t*0.0625; //將t乘以0.0625得到實際溫度值(溫度傳感器設置12位精度,最小分辨率是0.0625) t= tt*10+0.5; //放大10倍(將小數(shù)點后一位顯示出來)輸出并四舍五入 return(t); //返回溫度值 } //===================================================================================== //===================================================================================== //===================================================================================== /*****延時子程序*****/ void Delay(uint num) { while( --num ); } /*****初始化定時器0*****/ void InitTimer(void) { TMOD=0x1; TH0=0x3c; TL0=0xb0; //50ms(晶振12M) } /*****讀取溫度*****/ void check_wendu(void) { uint a,b,c; c=ReadTemperature(); //獲取溫度值 a=c/100; //計算得到十位數(shù)字 b=c/10-a*10; //計算得到個位數(shù)字 m=c/10; //計算得到整數(shù)位 n=c-a*100-b*10; //計算得到小數(shù)位 if(m<0){m=0;n=0;} //設置溫度顯示上限 if(m>99){m=99;n=9;} //設置溫度顯示上限 } /*****顯示開機初始化等待畫面*****/ void Disp_init(void) { P0 = ~0x80; //顯示---- P2 = 0x7F; Delay(200); P2 = 0xDF; Delay(200); P2 = 0xF7; Delay(200); P2 = 0xFD; Delay(200); P2 = 0xFF; //關閉顯示 } /*****顯示溫度子程序*****/ void Disp_Temperature(void) //顯示溫度 { P0 = ~0x98; //顯示C P2 = 0x7F; Delay(100); P2=0xff; P0=~LEDData[n]; //顯示個位 P2 = 0xDF; Delay(100); P2=0xff; P0 =~LEDData[m%10]; //顯示十位 DIAN = 0; //顯示小數(shù)點 P2 = 0xF7; Delay(100); P2=0xff; P0 =~LEDData[m/10]; //顯示百位 P2 = 0xFD; Delay(100); P2 = 0xff; //關閉顯示 } /*****顯示報警溫度子程序*****/ void Disp_alarm(uchar baojing) { P0 =~0x98; //顯示C P2 = 0x7F; Delay(100); P2=0xff; P0 =~LEDData[baojing%10]; //顯示十位 P2 = 0xDF; Delay(100); P2=0xff; P0 =~LEDData[baojing/10]; //顯示百位 P2 = 0xF7; Delay(100); P2=0xff; if(set_st==1)P0 =~0xCE; else if(set_st==2)P0 =~0x1A; //上限H、下限L標示 P2 = 0xFD; Delay(100); P2 = 0xff; //關閉顯示 } /*****報警子程序*****/ void Alarm() { if(x>=10){beep_st=~beep_st;x=0;} if((m>=shangxian&&beep_st==1)||(m BEEP=0; ALAM=0; } else { BEEP=1; ALAM=1; } } /*****主函數(shù)*****/ void main(void) { uint z; InitTimer(); //初始化定時器 EA=1; //全局中斷開關 TR0=1; ET0=1; //開啟定時器0 IT0=1; IT1=1; check_wendu(); check_wendu(); for(z=0;z<300;z++) { Disp_init();


上一篇:一個定時器生成多路PWM波形的原理和方法
下一篇:STC12C5A60S2利用PCA時鐘溢出做的PWM信號
- 熱門資源推薦
- 熱門放大器推薦
 開關電源EMI技術(shù)文檔
開關電源EMI技術(shù)文檔 LM760H/883
LM760H/883
設計資源 培訓 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- 使用 Infineon Technologies AG 的 OM7641SM 的參考設計
- 使用外部基準電流的 LT3088EDD 線性穩(wěn)壓器的典型應用
- NSV50350AST3G 恒流 LED 燈串驅(qū)動器的典型應用
- LM431B 可編程并聯(lián)穩(wěn)壓器的典型應用
- MIC280,MIC280 Precision Itty-bitty 熱監(jiān)控器評估板
- STEVAL-ISA165V1,用于帶有 STP120N4F6 的 LLC 諧振轉(zhuǎn)換器的 SRK2001 自適應同步整流控制器的評估板
- Relay_ZFV1:基于ESP32的6路繼電器控制板
- 使用具有 B 類 EMI 過濾功能的 RP10-123.3SA DC/DC 轉(zhuǎn)換器(單輸出)的典型應用
- 89C52RC plcc 44 刷程序驗證板
- #第五屆立創(chuàng)電子設計大賽#智慧安全用電探測器






- 大眾汽車宣布明年起其所有電動車型全面轉(zhuǎn)向磷酸鐵鋰電池,升級至MEB Plus平臺
- 總產(chǎn)值破2000億,深圳要做“機器人第一城”?
- 鴻道Intewell操作系統(tǒng) 人形機器人底層操作系統(tǒng)
- 如何定位國產(chǎn)智駕芯片的終局價值?
- 新一代車規(guī)級數(shù)字功放電感VSAD-T系列 為汽車音響注入高保真基因
- 蜂巢能源快充電池突破:15分鐘充至滿電,提升30%效率
- 整車操作系統(tǒng)何以躋身智能汽車三大件?
- 人形機器人如何做到“手眼”協(xié)同+“大小腦”協(xié)同?
- 中國電池公司獲英國政府10億英鎊支持!
- 從游戲到智能駕駛,英偉達有哪些技術(shù)升級?
- 嘉聯(lián)益Q1毛利率回升 LCP天線軟板效應如何仍有待觀察
- 樂視網(wǎng):6億元為擬進行理財?shù)念~度 存不確定性
- 傳360公司將拆分IoT業(yè)務 周鴻祎:徹底謠言
- 樂視網(wǎng)談樂融致新融資:恢復公司業(yè)務規(guī)模仍存不確定
- 董明珠對新產(chǎn)業(yè)布局缺乏明確規(guī)劃|一句話點評
- 2018年度工業(yè)機器人發(fā)展綜述 投資者警惕機器人產(chǎn)業(yè)投資過熱的風險
- 美國五家RPA企業(yè)搶走半數(shù)全球市場 中國還有機會嗎?
- 物聯(lián)網(wǎng)正在悄然改變你身邊的十大場景有哪些?
- 我國能源互聯(lián)網(wǎng)典型應用、制約瓶頸和發(fā)展建議
- 國家電網(wǎng)有限公司大數(shù)據(jù)中心主任王繼業(yè):把數(shù)據(jù)從“戰(zhàn)斗”資源變“戰(zhàn)略”資源







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號