摘要 自動控制系統的綜合性能在很大程度上取決于步進電機的度,細分技術可以顯著改善步進電機的距角。利用細分算法控制AT89C51單片機輸出具有一定時序的方波控制信號,經過TA8435芯片處理后輸出相應的階梯波來實現對步進電機的細分控制。本文重點就TA8435芯片的使用與控制進行詳細介紹。
引 言
步進電機是控制執行元件,是機電一體化的關鍵產品之一,廣泛應用在各種自動化控制系統和精密機械等領域。步進電機將電脈沖信號轉換成相應角位移或線性位移的驅動裝置,其轉動速度和脈沖頻率能嚴格同步,具有較高的重復定位,且沒有累積誤差。步進電機的驅動是由驅動電路實現的,驅動電路和步進電機構成一個有機整體。
步進電動機具有結構簡單、可靠性高和成本低的優點,但同時也存在振蕩、失步以及不夠的問題,從而制約了在高度自動控制系統中的應用,如雕刻機、打印機、硬盤驅動器、繪圖儀、鉆孑L機等。采用細分控制可以很好地提高,因此對基于單片機控制的步進電機步距角細分系統進行設計與研究有著實際的意義。
1 原理與方案
1.1 細分原理
細分控制本質上是對步進電機的勵磁繞組中的電流進行控制,使內部的合成磁場為均勻的圓形旋轉磁場。合成磁場矢量的幅值決定了步進電機旋轉力矩的大小,相鄰兩合成磁場矢量的夾角大小決定了該步距角的大小。
細分就是將輸入脈沖從原來的電流方波細分成以若干個等幅、等寬上升和下降的電流階梯波。電流波形有多少個臺階,轉子就會以同樣的個數轉過一個步距角。
這種將1個步距角細分成若干步的驅動方法稱為“細分驅動”。
細分驅動的特點是,可以在不改變電機結構參數的情況下,使步距角減小、提高;同時能使步進電機運行平穩,提高勻速性,此外,還能減弱或消除振蕩。
1.2 細分方案
如采用DSP的軟件細分方式,具有編程的靈活性、細分的成本低、效率高的優點,但單一的軟件細分在與速度兼顧上會有矛盾。細分的步數越多,越高,但步進電機的轉動速度卻會降低;要提高轉動速度,細分的步數就得減少。
如采用FPGA的全數字化控制方式,工作過程為PwM的輸出經過驅動模塊控制電機的繞組電流。電機的繞組電流被采樣后變成電壓信號輸入到電流傳感器,傳感器輸出占空比變化的PWM波輸入到FPGA中,FPGA根據輸入的PWM波的占空比的值確定反饋電流的大小;但這種方式存在功耗高,成本高的缺點。
如采用脈沖調制單片機細分控制方式,單片機按控制要求輸出驅動脈沖,經過TA8435集成芯片放大調制,形成的階梯波對電機進行細分控制。由于單片機細分控制在與速度上不存在矛盾,兩者可以單獨運行,而且單片機成本低,結構簡單,可以實現步距角的細分,提高步距角細分的性,所以單片機細分控制是比較理想的低成本細分方案。
2 系統設計
為便于實驗調試以及系統的設置與監控,系統主要由步進電機、AT89CC51單片機、TA8435步進電機細分芯片、LED顯示模塊、波形顯示模塊、按鍵等幾部分構成,如圖1所示。從功能上又可分為方波與階梯波兩部分。

2.1 方波部分
AT89C51是一種低功耗、高性能CMOS 8位單片機,具有8 KB可編程Flash存儲器,在外圍電路配合下輸出對應的需要步進電機動作的方波。脈沖的個數和頻率直接對旋轉角度和轉動速度進行控制,按鍵與顯示模塊可以方便地設置和監控。
2.2 階梯波部分
TA8435是產生階梯波的芯片,波形顯示模塊可以直觀顯示階梯波形。
(1)TA8435的特點
TA8435是東芝公司生產的單片正弦細分二相步進電機驅動專用芯片,具有以下特點:
①工作電壓范圍寬(10~40 V);
②輸出電流可達1.5 A(平均)和2.5 A(峰值);
③具有整步、半步、1/4細分、1/8細分運行方式供選擇;
④采用脈寬調試式斬波驅動方式;
⑤具有正/反轉控制功能;
⑥帶有復位和使能引腳;
⑦可選擇使用單時鐘輸入或雙時鐘輸入。
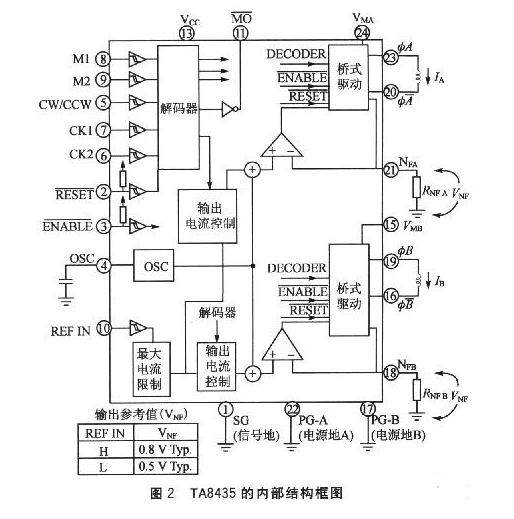
(2)TA8435的內部結構
TA8435主要由1個解碼器、2個橋式驅動電路、2個輸出電流控制電路、2個電流限制電路、1個斬波器等功能模塊組成,內部結構如圖2所示。
(3)TA8435的引腳
TA8435的引腳如表1所列。

(4)TA8435的細分工作原理
在圖3中個CK時鐘周期時,解碼器打開橋式驅動電路,電流從VMA流經電機的線圈后經RNFA后與地構成回路。由于線圈電感的作用,電流是逐漸增大的,所以RNFB上的電壓也隨之上升。當RNFB上的電壓大于比較器正端的電壓時,比較器使橋式驅動電路關閉,電機線圈上的電流開始衰減,RNFB上的電壓也相應減小;當電壓值小于比較器正向電壓時,橋式驅動電路又重新導通。如此循環,電流不斷的上升和下降形成鋸齒波,其波形如圖3中IA波形的第1段。另外由于斬波器頻率很高,一般在幾十kHz(其頻率大小與所選用電容有關),在OSC作用下,電流鋸齒波紋是非常小的,可以近似認為輸出電流是直流。在第2個時鐘周期開始時,輸出電流控制電路輸出電壓UA達到第2階段,比較器正向電壓也相應為第2階段的電壓,因此,流經步進電機線圈的電流從第1階段也升至第2階段2,電流波形如圖JA的第2部分。第3、4時鐘周期的工作原理與第1、2周期是一樣的,只是又升高了比較器的正向電壓而已。如此終形成階梯電流,即加在線圈B上的電流。在CK一個時鐘周期內,流經線圈A和線圈B的電流共同作用,步進電機運轉一個細分步。

(5)電路中TA8435引腳的設定
①TA8435的工作方式設定。TA8435有4種工作方式,分別代表著無細分、2細分、4細分、8細分。工作方式由M1、M2引腳電平的組合來決定:M1:O、M2一O時,細分數=無;M1=O、M2=1時,細分數=2;M1=1、M2=0時,細分數=4;M1=1、M2=1時,細分數=8。本設計為了步進電機能平穩工作,選擇8細分,即將M1、M2置為高電平。
②控制脈沖的輸入設定。TA8435有兩個脈沖輸入引腳CKl、CK2,可以用來輸入兩路脈沖。當其中一個引腳輸入脈沖時,另一個引腳必須保持高電平。本設計中,控制脈沖只有一路,因此直接接入CKl,同時將CK2置高,即可滿足要求。
③驅動電流的設定。TA8435輸出的驅動電流由VNF和NFA、NFB引腳上所連的檢測電阻RNF決定,公式為Io=VNF/RNF;而VNF的大小由REF IN引腳電平決定,即高電平時VNF=0.8 V,低電平時VNF=0.5 V。本設計中所需驅動電流為1.5 A,因此設定REF IN引腳為高電平,RNF=0.53 Ω。步進電機細分驅動電路如圖4所示。

(6)步進電機接口
本電路采用四相六線制的PM42L-048系列永磁步進電動機。電機的主要參數為:步距角7.5。,步距角±7%。電機接口電路如圖5所示,四相按二相使用可以提高步進電機的輸出轉矩。D1~D4快恢復二極管用來泄放繞組電流,其型號為IN5822。

3 運行測試
在同等條件下做兩個實驗:51單片機按照鍵盤的設置輸出相應時序的脈沖,此脈沖為TA8435的輸入標準信號。實驗1設置整步運行工作方式,TA8435輸出的脈沖沒有變化;實驗2設置1/8細分運行工作方式,TA84.35輸出的脈沖變化為上升與下降均有8個階梯波形,以實現對步進電機的細分。1/8細分時,每個脈沖轉O.981 7。,轉換成步距角為O.9802°×8=7.8416°與整步運行方式測量值比較過后,其步距角提高23%。每個脈沖步進電機轉的角度如表2所列。
結 語
在低速工作時,可以選用1/4細分或l/8細分模式,以提高步距角;在高速工作時,細分模式有可能達不到要求的速度,這時可以選用整步或半步方式,步進電機運行穩定,振動小、噪聲也小。采用單片機可以方便地控制TA8435在幾種工作模式之間的切換,而且TA8435細分芯片具有價格低、控制簡單、工作可靠的特點,所以本方案實現的細分控制技術可以有效地提高步進電機的控制,減小步進電機的振動并降低其噪聲。此項目是課題組在福建省科技廳的支持下研究開發的,其已在智能居家系統中的動作執行部分運行;工作可靠,性能穩定。
上一篇:8位單片機體系的直接軟件構架(C51系列)
下一篇:(17)單片機仿真還可以這樣玩?Keil聯合Proteus實現51單片機
推薦閱讀最新更新時間:2025-06-16 08:00

 時間觸發嵌入式系統設計模式(使用8051系列微控制器開發可靠應用)
時間觸發嵌入式系統設計模式(使用8051系列微控制器開發可靠應用) TT-DL-1電力電子技術及電機控制實驗裝置指導書
TT-DL-1電力電子技術及電機控制實驗裝置指導書 2023年F題-基于聲傳播的智能定位系統-技術報告
2023年F題-基于聲傳播的智能定位系統-技術報告 振蕩電路的設計與應用
振蕩電路的設計與應用設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- T12智能恒溫焊臺V2
- LTM4650IY-1A 1.2V 和 1V 輸出跟蹤的典型應用電路
- 遠程文字圖形顯示器
- LTC1550LCS8-2 1mVP-P 紋波、-2V 輸出 GaAs FET 偏置發生器的典型應用電路
- 使用 NXP Semiconductors 的 ISP1705 的參考設計
- LPC32x0 電源域設計,適用于低功耗、高性能應用的嵌入式 MCU 系列
- 基于 ADG904-R 的中頻帶通濾波器組切換網絡,用于無線基礎設施
- FS1.1s雙面HUB
- DC489A-B,使用 LTC5507ES6 HF 至 UHF 頻率射頻功率檢測器的演示板
- XRP7714EVB-DEMO-3,基于XRP7714的四通道數字PWM演示板













 京公網安備 11010802033920號
京公網安備 11010802033920號