一、串口通信原理
UART:Universal Asynchronous Receiver/Transmitter(通用異步收發送器),用來傳輸串行數據,發送數據時,CPU將并行數據寫入UART,UART按照一定格式在TxD線上串行發出;接收數據時,UART檢測到RxD線上的信號,將串行收集放到緩沖區中,CPU即可讀取UART獲得的這些數據。
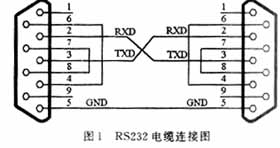
UART最精簡的連線形式只有3根線,TXD用于發送,RXD用于接收,GND用于提供參考電平。UART之間以幀作為數據傳輸單位,幀由具有完整意義的若干位組成,它包含開始位、數據位、校驗位和停止位。發送數據之前,互相通信的UART之間要約定好數據傳輸速率(波特率的倒數)、數據的傳輸格式(多少個數據位、是否使用校驗位、奇校驗還是偶校驗、多少個停止位)。
二、S3C2440串口介紹
s3c2440提供了三個UART端口,它們都可以通過查詢、中斷和DMA方式傳輸數據,而且每個UART都分別有一個64個字節的接收FIFO和一個64個字節的發送FIFO。如下圖所示:每個UART包含一個波特率發生器、發送器、接收器和一個控制單元。波特率發生器可以由PCLK、FCLK/n或UEXTCLK(外部輸入時鐘)時鐘驅動。UART通過使用系統時鐘可以支持最高115.2Kbps的比特率。如果是使用外部器件提供UEXTCLK的UART,則UART可以運行在更高的速度。發送器和接收器各包含一個64字節的FIFO和數據移位器。要發送數據時,先將數據寫入到FIFO接著在發送前復制到發送移位器中,隨后將數據從發送數據引腳(TXDn)移出;接收數據時,從接收數據引腳(RXDn)移入收到的數據,接著從移位器復制到FIFO。

三、S3C2440的串口寄存器配置
3.1 串行數據格式設置

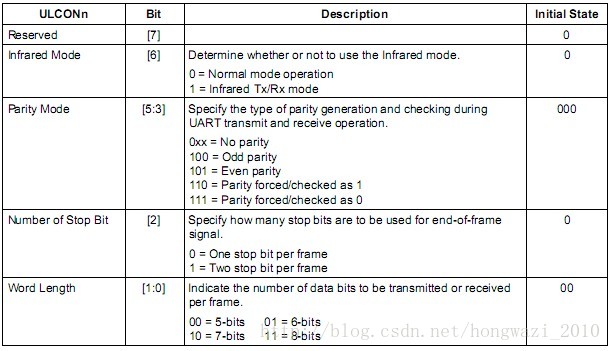
例子:ULCON0=0x03 //8N1(正常模式 8個數據位,無較驗,1個停止位)
3.2 UART控制寄存器

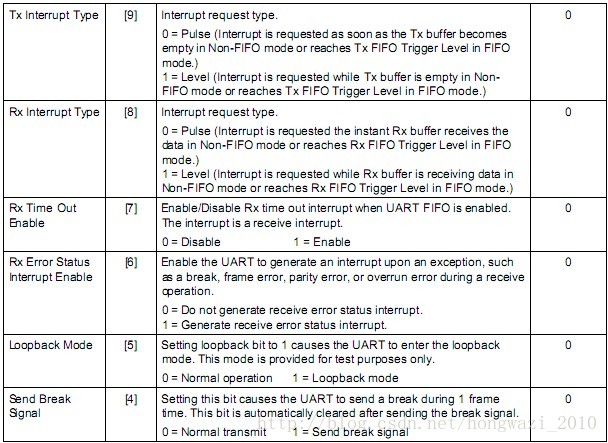
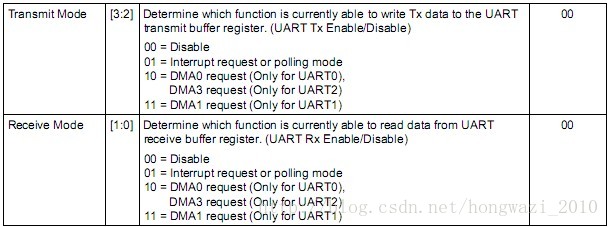
例子:UCON=0x05 //時鐘使用PLCK,中斷為邊沿觸發,禁止接受和發送超時,不產生接受錯誤中斷,不采用RX、TX直接相連的調節模式,rx和tx處于中斷或者查詢模式。
3.3 UART發送接受狀態寄存器
當程序使用的是查詢方式收發數據時,必須通過讀取UART寄存器的值來正確控制UART數據的收發。

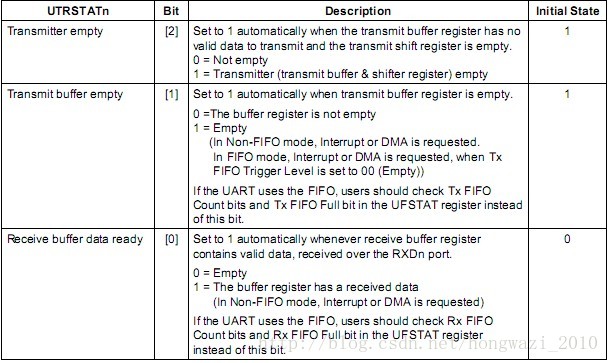
#define TXD0READY (1<<2)
#define RXD0READY (1)
//發送字符
void putc(unsigned char c)
{
/* 等待,直到發送緩沖區中的數據已經全部發送出去 */
while (!(UTRSTAT0 & TXD0READY));
/* 向UTXH0寄存器中寫入數據,UART即自動將它發送出去 */
UTXH0 = c;
}
//接受字符
unsigned char getc(void)
{
/* 等待,直到接收緩沖區中的有數據 */
while (!(UTRSTAT0 & RXD0READY));
/* 直接讀取URXH0寄存器,即可獲得接收到的數據 */
return URXH0;
}
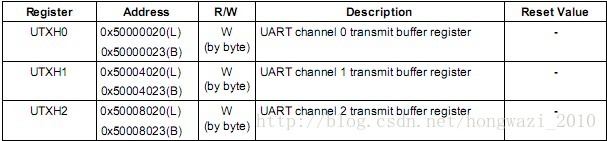
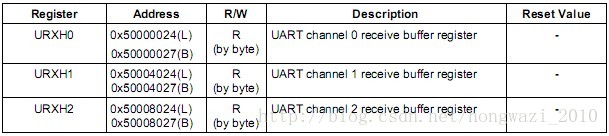
3.4 發送和接受緩沖寄存器
當串口有數據可讀時,程序直接讀取URXHn,當用戶想發送數據時直接將數據寫入到UTXHn即可。
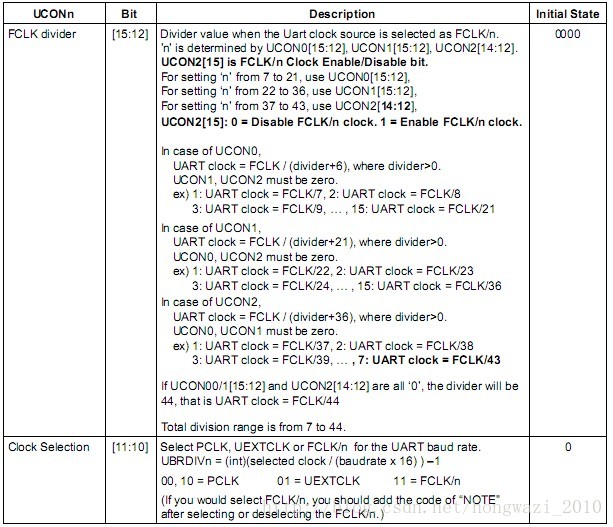
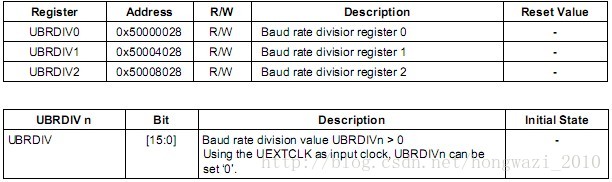
3.5 波特率寄存器
UBRDIVn由下列表達式確定:
UBRDIVn=(int)(UART時鐘/(波特率*16))-1
假如uart0采用中斷模式來收發數據我們必須要做三件事:
1.在程序的啟動代碼中開中斷
2.設置INTMSK和INTSUBMSK,打開uart0中斷
3.配置GPH2,GPH3用作TXD0,RXD0
四、串口中斷控制led燈實例(tq2440)
啟動代碼:初始化時鐘、led引腳配置、uart0初始化以及中斷相關設定
.extern main
.text
.global _start
_start:
@******************************************************************************
@ 異常向量,本程序中,除Reset和HandleIRQ外,其它異常都沒有使用
@******************************************************************************
b Reset
@ 0x04: 未定義指令中止模式的向量地址
HandleUndef:
b HandleUndef
@ 0x08: 管理模式的向量地址,通過SWI指令進入此模式
HandleSWI:
b HandleSWI
@ 0x0c: 指令預取終止導致的異常的向量地址
HandlePrefetchAbort:
b HandlePrefetchAbort
@ 0x10: 數據訪問終止導致的異常的向量地址
HandleDataAbort:
b HandleDataAbort
@ 0x14: 保留
HandleNotUsed:
b HandleNotUsed
@ 0x18: 中斷模式的向量地址
b HandleIRQ
@ 0x1c: 快中斷模式的向量地址
HandleFIQ:
b HandleFIQ
Reset:
ldr sp, =4096 @ 設置棧指針,以下都是C函數,調用前需要設好棧
bl disable_watch_dog @ 關閉WATCHDOG,否則CPU會不斷重啟
msr cpsr_c, #0xd2 @ 進入中斷模式
ldr sp, =3072 @ 設置中斷模式棧指針
msr cpsr_c, #0xd3 @ 進入管理模式
ldr sp, =4096 @ 設置管理模式棧指針,
@ 其實復位之后,CPU就處于管理模式,
@ 前面的“ldr sp, =4096”完成同樣的功能,此句可省略
bl clock_init
bl init_led @ 初始化LED的GPIO管腳
bl init_irq @ 調用中斷初始化函數,在init.c中
msr cpsr_c, #0x53 @ 設置I-bit=0,開IRQ中斷
ldr lr, =halt_loop @ 設置返回地址
ldr pc, =main @ 調用main函數
halt_loop:
b halt_loop
HandleIRQ:
sub lr, lr, #4 @ 計算返回地址
stmdb sp!, { r0-r12,lr } @ 保存使用到的寄存器
@ 注意,此時的sp是中斷模式的sp
@ 初始值是上面設置的3072
ldr lr, =int_return @ 設置調用ISR即EINT_Handle函數后的返回地址
ldr pc, =EINT_Handle @ 調用中斷服務函數,在interrupt.c中
int_return:
ldmia sp!, { r0-r12,pc }^ @ 中斷返回, ^表示將spsr的值復制到cpsr
啟動代碼中使用到的初始化代碼
#define GPB5_out (1<<(5*2))
#define GPB6_out (1<<(6*2))
#define GPB7_out (1<<(7*2))
#define GPB8_out (1<<(8*2))
#define GPB5_msk (3<<(5*2))
#define GPB6_msk (3<<(6*2))
#define GPB7_msk (3<<(7*2))
#define GPB8_msk (3<<(8*2))
/*
* K1,K2,K3,K4對應GPF1、GPF4、GPF2、GPF0
*/
#define GPF0_int (0x2<<(0*2))
#define GPF1_int (0x2<<(1*2))
#define GPF2_int (0x2<<(2*2))
#define GPF4_int (0x2<<(4*2))
#define GPF0_msk (3<<(0*2))
#define GPF1_msk (3<<(1*2))
#define GPF2_msk (3<<(2*2))
#define GPF4_msk (3<<(4*2))
/*
* 關閉WATCHDOG,否則CPU會不斷重啟
*/
void disable_watch_dog(void)
{
WTCON = 0; // 關閉WATCHDOG很簡單,往這個寄存器寫0即可
}
void init_led(void)
{
// LED1,LED2,LED3,LED4對應的4根引腳設為輸出
GPBCON &= ~(GPB5_msk | GPB6_msk | GPB7_msk | GPB8_msk);
GPBCON |= GPB5_out | GPB6_out | GPB7_out | GPB8_out;
}
/*
* 初始化GPIO引腳為外部中斷
* GPIO引腳用作外部中斷時,默認為低電平觸發、IRQ方式(不用設置INTMOD)
*/
void init_irq( )
{
INTMSK &=~(1<<28); //開啟uart0中斷
INTSUBMSK &=~(3<<0);//開啟uart0的接收和發送中斷
GPHCON |= 0xa0; // GPH2,GPH3用作TXD0,RXD0
GPHUP = 0x0c; // GPH2,GPH3內部上拉
ULCON0 = 0x03; // 8N1(8個數據位,無較驗,1個停止位)
UCON0 = 0x05; // 查詢方式,UART時鐘源為PCLK
UFCON0 = 0x00; // 不使用FIFO
UMCON0 = 0x00; // 不使用流控
UBRDIV0 = 0x1a; // 波特率為115200
/*
* 設定優先級:
* ARB_SEL0 = 00b, ARB_MODE0 = 0: REQ1 > REQ2 > REQ3,即EINT0 > EINT1 > EINT2
* 仲裁器1、6無需設置
* 最終:
* EINT0 > EINT1> EINT2 > EINT4 即K4 > K1 > K3 > K2
*/
PRIORITY = (PRIORITY & ((~0x01) | ~(0x3<<7)));
// EINT0、EINT1、EINT2、EINT4_7使能
INTMSK &= (~(1<<0)) & (~(1<<1)) & (~(1<<2)) & (~(1<<4));
}
/*
* 對于MPLLCON寄存器,[19:12]為MDIV,[9:4]為PDIV,[1:0]為SDIV
* 有如下計算公式:
* S3C2410: MPLL(FCLK) = (m * Fin)/(p * 2^s)
* S3C2440: MPLL(FCLK) = (2 * m * Fin)/(p * 2^s)
* 其中: m = MDIV + 8, p = PDIV + 2, s = SDIV
* 對于本開發板,Fin = 12MHz
* 設置CLKDIVN,令分頻比為:FCLK:HCLK:PCLK=1:2:4,
* FCLK=200MHz,HCLK=100MHz,PCLK=50MHz
*/
void clock_init(void)
{
CLKDIVN = 0x03; // FCLK:HCLK:PCLK=1:2:4, HDIVN=1,PDIVN=1
/* 如果HDIVN非0,CPU的總線模式應該從“fast bus mode”變為“asynchronous bus mode” */
__asm__(
"mrc p15, 0, r1, c1, c0, 0n" /* 讀出控制寄存器 */
"orr r1, r1, #0xc0000000n" /* 設置為“asynchronous bus mode” */
"mcr p15, 0, r1, c1, c0, 0n" /* 寫入控制寄存器 */
);
MPLLCON =((0x5c<<12)|(0x01<<4)|(0x02)); /* 現在,FCLK=200MHz,HCLK=100MHz,PCLK=50MHz */
}
中斷處理函數
#include "s3c24xx.h"
void EINT_Handle()
{
/*
* K1,K2,K3,K4對應GPF1、GPF4、GPF2、GPF0
* 即 EINT1, ETIN4, EINT2, EINT0
* oft為 1, 4, 2, 0 (對應INTMSK寄存器)
*/
switch(URXH0)
{
// K1被按下
case '1':
{
GPBDAT |= (0xF<<5); // 所有LED熄滅
GPBDAT &= ~(1<<5); // LED1點亮
break;
}
// K2被按下
case '2':
{
GPBDAT |= (0xF<<5); // 所有LED熄滅
GPBDAT &= ~(1<<6); // LED2點亮
break;
}
// K3被按下
case '3':
{
GPBDAT |= (0xF<<5); // 所有LED熄滅
GPBDAT &= ~(1<<7); // LED3點亮
break;
}
// K4被按下
case '4':
{


上一篇:S3C2440串口學習
下一篇:S3C2440開發板的學習使用(一)----串口的安裝
- 熱門資源推薦
- 熱門放大器推薦
 混合式高壓直流斷路器試驗規范
混合式高壓直流斷路器試驗規范 903RPFE
903RPFE
設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- 用于 STK6000 入門套件的 ATSTK600-SC14、STK600-TQFP64-2 插座卡
- 【訓練營】機器狗v0.0.1
- EVAL-ADuM1241EBZ,基于 ADuM1446ARQZ 數字隔離器的 iCoupler 評估系統
- 使用 Analog Devices 的 LTC3130IUDC-1 的參考設計
- TC78S121FTG/FNG 用于 TC78S121FNG 步進電機驅動器的應用說明
- AD5348 并行接口、八路電壓輸出、12 位 DAC 的典型應用
- stm32f103vct6 開發板
- AD1583 2.5V 至 5.0V 微功率、精密串聯模式電壓基準的典型應用電路
- AD8627AKSZ-REEL精密放大器用于8極Sallen-Key低通濾波器的典型應用電路
- LT8303ES5 30 至 80Vin、24Vout 隔離反激式轉換器的典型應用電路






- 意法半導體緊湊型可配置車規負載驅動器具備安全引腳
- 美光宣布在美投資增至 2000 億美元,加建晶圓廠和 HBM 封裝設施
- AMD舉辦Advancing AI 2025大會:Instinct MI350系列GPU發布,35倍推理性能提升
- 特斯拉起訴前Optimus機器人工程師,指控其竊取商業機密
- Nordic Semiconductor將在MWC上海2025上展示前沿蜂窩物聯網解決方案
- SiC 市場的下一個爆點:共源共柵(cascode)結構詳解
- 香港科技大學工學院推出擬人化自動駕駛系統
- 現代摩比斯推出新型安全技術 防止追尾碰撞
- 研究人員開發新型機器人系統 利用AI賦能機器人技術
- 研究人員開發具有突破性觸覺靈敏度的機械手 可實現類人靈巧操作







 京公網安備 11010802033920號
京公網安備 11010802033920號