




1. 自動駕駛技術的發展趨勢與 AI 應用現狀分析
1.1 自動駕駛技術發展現狀
自動駕駛汽車是一個機電一體、軟硬件高度集成、以最終實現替代人操作的復雜信息物理融合系統,主要由感知、決策和執行子系統構成,自動駕駛技術涉及環境感知、決策規劃、控制執行、V2X 通信等關鍵技術,其結構如圖 1 所示。
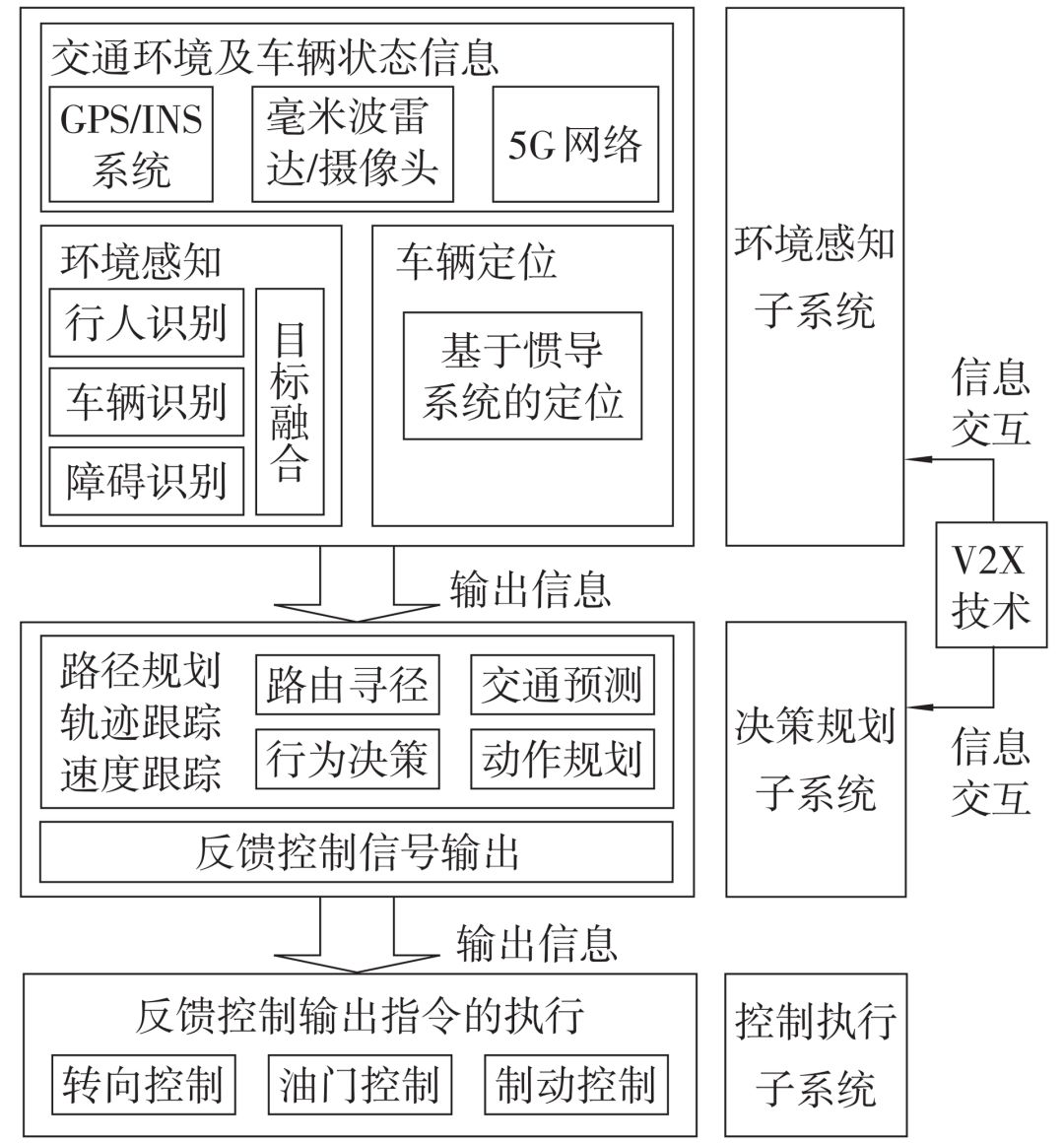
圖 1 自動駕駛汽車分層結構示意圖
1.1.1 自動駕駛發展路線
1.1.2 我國自動駕駛技術發展現狀

1.2 AI 在自動駕駛中的應用現狀與挑戰
1.2.1 人工智能技術簡介
AI 是一門研究模擬、延伸和擴展人類智能的理論、方法及技術的科學,其誕生于 20 世紀 50 年代,目前發展為計算機視覺、自然語言理解與交流、認知與推理、機器人學、博弈與倫理和機器學習六大領域,并呈現出各領域相互滲透的趨勢。
其中,機器學習研究如何在算法的指導下自動學習輸入數據樣本的數據結構和內在規律并獲得新的經驗與知識,從而對新樣本進行智能識別,甚至對未來進行預測 [6]。典型的機器學習算法有線性回歸、K-均值、K-近鄰、主成份分析、支持向量機、決策樹、人工神經網絡等。
在人工神經網絡基礎上發展起來的深度學習模型是當前最為有效的機器學習算法模型之一,成為當前人工智能研究與應用的熱點。深度學習模型在人工神經網絡中加入了多個隱層,于 2006 年由 Geoffrey Hinton 和 Ruslan Salakhutdinov 提出。由于在 2012 年的 ImageNet 比賽(計算機視覺領域最具影響力的國際比賽)中成績突出,深度學習模型受到社會各界的極大關注,并在多個領域取得研究進展,出現了一批成功的商業應用,如谷歌翻譯、蘋果語音工具 Siri、微軟的 Cortana 個人語音助手、螞蟻金服的掃臉技術、谷歌的 AlphaGo 等[6]。
1.2.2 人工智能在自動駕駛技術中的應用
AI 在自動駕駛技術中有著豐富的應用,諸如深度學習、增強學習都在自動駕駛技術中取得較好的研究結果。
1)環境感知領域
感知處理是 AI 在自動駕駛中的典型應用場景。如基于 HOG 特征的行人檢測技術在提取圖像的 HOG 特征后通常通過支持向量機算法進行行人檢測;基于激光雷達與攝像頭的車輛檢測技術中,需對激光雷達數據做聚類處理;線性回歸算法、支持向量機算法、人工神經網絡算法也常被用于車道線和交通標志的檢測。
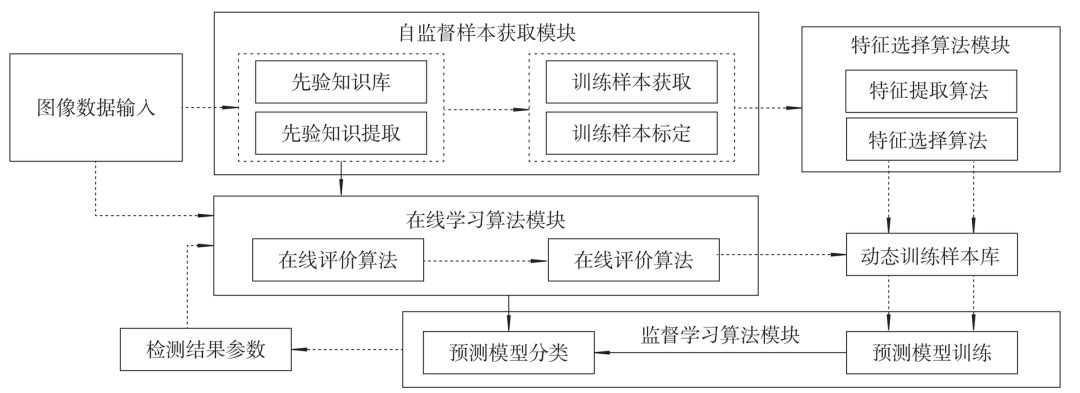
圖 2 基于機器學習的非結構化道路檢測框架
圖 2[7]所示的框架把機器學習用到鄉村公路、野外土路等非結構化道路的檢測中。由于車輛行駛環境復雜,已有感知技術在檢測與識別精度方面尚無法滿足自動駕駛的需要,基于深度學習的圖像處理成為自動駕駛視覺感知的重要支撐[8]。在感知融合環節,常用的 AI 方法有貝葉斯估計、統計決策理論、證據理論、模糊推理,、神經網絡以及產生式規則等。
2)決策規劃領域
決策規劃處理是 AI 在自動駕駛中的另一個重要應用場景,狀態機、決策樹、貝葉斯網絡等 AI 方法已有大量應用。近年來興起的深度學習與強化學習能通過大量學習實現對復雜工況的決策,并能進行在線學習優化,由于需要較多的計算資源,當前是計算機與互聯網領域研究自動駕駛規劃決策處理的熱門技術 [8]。
3)控制執行領域
傳統控制方法有 PID 控制、滑模控制、模糊控制、模型預測控制等。智能控制方法主要有基于模型的控制、神經網絡控制和深度學習方法等。
1.2.3 自動駕駛領域AI應用面臨的挑戰
當前,以深度學習為代表的當代 AI 技術,基于在機器視覺(MV)、自然語言處理(NLP)等領域的成功應用,被引入到自動駕駛技術的環境感知、決策規劃和控制執行的研究中,獲得了較好的效果。
由于車輛行駛環境復雜,一些嚴重依賴于數據、計算資源和算法的 AI 技術,在自動駕駛的感知、決策、執行等環節尚無法滿足實時性需求,一些以其作為核心支撐的自動駕駛系統原型面臨挑戰:
1)實時可靠性需求給系統的計算速度和計算可靠性帶來挑戰。自動駕駛系統要求感知、決策和執行各子系統的響應必須是實時可靠的,因此需要系統提供高速可靠的計算能力。
2)部件小型化的產業化需求使目前系統龐大的硬件尺寸面臨挑戰。當前的自動駕駛系統原型大多是計算機系統或工控機系統,不滿足車規級部件需求。
3)個性化適配無法滿足。當前興起的深度學習算法對應用環境變異的自適應性較差,對不同車型和不同場景存在模型重新訓練的適配問題,已有的自動駕駛系統原型不能滿足。
4)自主學習、自主維護需求無法滿足。深度學習呈現出學習集越大,效果越好的特點,由此需要自動駕駛系統具備持續自主學習能力,而已有的自動駕駛原型無法滿足。面對老化、磨損等問題,部件出廠時的標定參數不再處于最優狀態,自動駕駛系統需要基于汽車行駛數據、性能評價進行智能整定(自標定)、診斷和維護,已有的自動駕駛原型也無法滿足需求。
5)成本控制面臨挑戰。當前自動駕駛系統原型造價尚不滿足產業化成本需求。
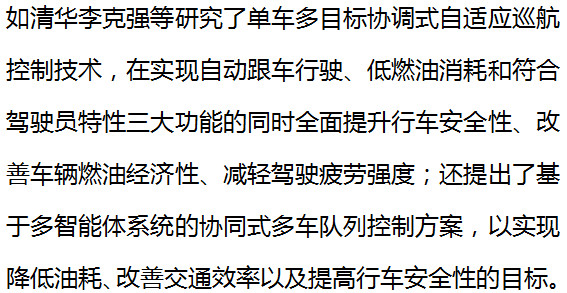
上述問題本質上是由于智能駕駛單車數據積累深度與廣度不足、強計算能力欠缺、任務自適應能力差、AI 算法優化適配困難。為解決上述問題,完成 AI 在車載終端的深度集成應用,考慮構建車云協同一體的智能駕駛系統。借助云平臺靈活、豐富的計算資源,處理復雜的 AI 算法,并將分析結果發給車端進行實時決策規劃,使云端域作為具有網絡功能開放的大腦和核心,成為連接網絡內部和車端業務需求的紐帶,藉此真正實現網絡智能化。基于云計算和大數據技術的發展,把自動駕駛系統分為車、云(平臺)兩層,提出車云協同自動駕駛系統架構。在云端提供數據存儲、數據共享和計算資源,支持深度學習、自主學習、自主維護和個性化適配等復雜 AI 算法。通過部分軟/硬件共享技術,可降低車端成本,使計算量減少,有利于車端嵌入式 AI 硬件產品的研發,以滿足車規級部件的需求。
2. 基于 AI 的車云協同自動駕駛系統架構及關鍵技術
圍繞 AI 技術應用于自動駕駛中的數據、計算與算法三大要素,面向多車型、多場景與個性化智能駕駛需求,針對智能駕駛單車系統面臨的等問題,提出一種基于 AI 的車云協同的自動駕駛系統架構方案,如圖 3 所示。
圖 3 基于 AI 的車云協同自動駕駛系統架構方案示意圖
該架構方案由基于 AI 的自動駕駛智能車端設備和基于大數據分析的自動駕駛云端系統兩部分組成,共同形成一個集復雜環境精確感知、通行智慧決策與行車控制優化執行的車云協同一體自動駕駛系統。
2.1 基于 AI 的自動駕駛智能終端
自動駕駛智能終端是一個集環境感知、規劃決策、執行控制等多項功能于一體的信息物理融合系統(CPS)[9]。為適應不同場景不同車型汽車自動駕駛的應用需求,需深入研究自動駕駛汽車嵌入式智能控制器軟硬件協同設計技術,建立可承載集傳感器數據采集、環境感知數據融合、規劃決策,執行控制 AI 算法為一體,滿足自動駕駛行車需求的智能終端軟硬件體系架構,設計實時可靠、具有系統容錯和「跛行」能力的自動駕駛汽車 AI 終端,提出實時可靠、任務自適應的智能終端專用系統軟件,實現 AI 算法的系統集成驗證與實車應用。需突破的關鍵技術包括實時可靠的自動駕駛 AI 終端硬件架構、可靠自適應的自動駕駛 AI 終端軟件架構和自動駕駛智能終端的 AI 技術集成應用等。
1)自動駕駛 AI 終端硬件架構
自動駕駛汽車 AI 終端是一個集環境感知、規劃決策、控制執行等多項功能于一體的綜合智能系統。根據自動駕駛系統在典型應用場景中針對環境感知、規劃決策以及執行控制等業務模塊體現出的不同任務分工、工作模式及通信互聯方式,研究自動駕駛 AI 終端的系統可靠性設計及模塊化設計方法,重點研究基于 GPU 和 MCU 的異構多核硬件系統架構和基于以太網的高速互聯通信架構。
2)自動駕駛 AI 終端軟件架構
自動駕駛車端系統集成了多個軟件功能模塊(環境感知、規劃決策、執行控制、導航、定位、交通信號監測等)和多個硬件執行單元(計算單元、控制單元、傳感器等),研究:
基于 AI 的感知、規劃、執行等功能性應用軟件系統架構與層次化、模塊化的設計方法;
基于任務自適應的系統軟件和應用軟件最優構架;
確保合理分配和調度包括 GPU、CPU、內存、總線和通信接口等在內的軟硬件資源,提供系統自我修復能力、模塊資源隔離能力、計算與內存資源分配能力、優先級執行能力,以及模塊間有效通信能力等。
3)自動駕駛 AI 終端的技術集成應用
自動駕駛系統作為一個典型的物理信息融合系統,必須通過 AI 方法的綜合運用才能實現進行數據信息和知識信息的綜合集成。
針對自動駕駛智能終端的有限軟硬件資源,構建面向自動駕駛智能終端的 AI 操作系統,使自動駕駛的感知融合、決策控制等任務能夠實時執行。AI 操作系統除具有通用操作系統的所有功能,還應包括語音識別、機器視覺、執行器系統和認知行為系統,可分為基礎設施層、技術研發層和集成應用層。基于 AI 的自動駕駛智能終端目前已得到業界的普遍重視,大量 AI 技術正以驚人的速度應用在自動駕駛汽車領域。
然而,目前仍面臨的一些問題亟待解決:
如 AI 算法需要大量標記的樣本庫進行自學習,且內在機理不清晰、邊界條件不確
定;
AI 技術應用范圍受限于車載芯片及傳感器的處理能力等。
因此,注重傳感器與汽車產業同步升級,藉此提高數據采集質量,使數據融合在硬件層面有解決方案;最大限度發揮 AI 技術在限定場景下的應用,如封閉/半封閉區域、低速/高速狀態、有軌交通、特種車輛等。
2.2 基于大數據分析的自動駕駛云端系統
在云計算平臺的強計算能力保障下,面向多車型、多場景以及個性化駕駛的需求,分析自動駕駛汽車系統中 AI 關于數據質量與訪問效率的要求,
研究面向 AI 的云計算平臺數據空間構建技術,實現車云兩端多類型、多領域數據的歸一化;
研究自動駕駛汽車系統中的車云兩端信息數據交互協同技術,構建信息數據交互協同框架,解決車云兩端信息數據的無縫對接問題,完成車端的信息數據訂閱與云端的信息數據分發。
在此基礎上,研究在不同車型、不同駕駛風格下適應多場景的 AI 算法適配問題,使自動駕駛汽車在感知、決策與執行 3 個層次均呈現較深的智能化,進而實現自動駕駛汽車整體智能的提升。
1)云端數據空間構建技術
為降低在多場景、多車型與個性駕駛等背景下的自動駕駛系統中 AI 數據處理和信息服務的復雜性,分析信息數據的分布、異構、時變、海量的數據特征,
研究基于信息數據源的元數據描述方法、元數據的沖突消減技術以及元數據的發布發現技術,實現元數據集的構建與管理;
研究信息數據空間的組織結構與建模技術,構建信息數據空間的對象關聯集;
研究基于元數據實體對象的索引和檢索技術,實現基于元數據的異構信息數據源的發布與發現能力。
2)車云協同技術
在不同的行車工況與應用場景中,無論是自動駕駛的在線 AI 學習訓練,還是離線的交互信息準備,為實施精準的行車環境感知、智慧的通行決策與優化的行車動作控制,車端與云端之間均需要進行大量的信息數據交互與協同。
基于 AI 的自動駕駛系統車云協同技術需主要解決信息數據在車端與云平臺之間的統一有效傳遞問題。車身傳感器節點的采樣數據包括數值型數據(如 GPS/INS 數據、毫米波雷達數據)和多媒體數據(如攝像頭圖像),將這些傳感器數據按一定頻率傳輸到云端數據庫,進行在線處理、離線處理、溯源處理和復雜數據分析。
文中提出的自動駕駛系統包括車端與云端兩部分智能子系統,云端系統不僅能夠存儲海量的傳感器實時采集數據,還可以存儲采集歷史數據,同時借助云計算完成這些海量數據的存儲、傳輸、分析處理,基于 AI 集成應用算法的智能駕駛控制模型,為車輛決策提供可靠、高效的協同控制方案。
3)云平臺 AI 算法應用技術
云平臺 AI 算法應用是自動駕駛云端系統的核心部分,它結合機器學習、數據挖掘等相關技術,對感知融合信息進行分析,為車輛控制規劃提供決策依據。車載嵌入式硬件平臺因計算、存儲能力有限,無法滿足 AI 模型的訓練需求。自動駕駛云平臺 AI 算法應用技術,利用虛擬化技術及網絡技術整合大規模可擴展的計算、存儲、數據、應用等分布式計算資源完成 AI 模型算法的學習訓練,能實現在云端訓練 AI 模型,通過車云協同技術將其部署到嵌入式平臺,使 AI 算法在車端自動駕駛系統上得到深度應用。
可以預見,自動駕駛云端系統未來面臨的主要問題集中在超大規模的數據存儲、數據加密和安全性保證以及提高 I/O 速率等方面;在技術落地上也面臨供應商協作及運營收費政策的限制。
因此,考慮充分利用現有創新資源和載體,融通各類企業級平臺及政府監管平臺數據,轉變通信系統和發布系統的封閉現狀,采用云計算模式構建交通服務體系,對于一些中小城市而言只需要租用相應的服務即可,有利于自動駕駛云端系統的普及。同時由政府引導,對云平臺技術規范及數據元格式等核心草案進行編制與推廣,從而引導自動駕駛云端系統應用的示范,推廣及可持續發展。
3. 結論
文中分析了自動駕駛技術的發展現狀,以及 AI 在自動駕駛技術中的應用發展趨勢與面臨的挑戰。在此基礎上,提出了一個基于 AI 的車云協同自動駕駛系統,闡述了系統組成及其關鍵技術。
文中提出 AI 深度應用于自動駕駛領域需重點解決自動駕駛車載終端的 AI 深度集成、自動駕駛系統車云計算平臺數據歸一化、車云信息數據交互協同、車云 AI 算法多車型多場景及個性駕駛適配等關鍵技術。
針對多車型多場景的應用工況,指出需研究自動駕駛汽車嵌入式智能控制器軟硬件協同設計技術;
針對車載自動駕駛系統本地存儲和計算能力有限的問題,提出以云計算作為車端能力的擴展,解決 AI 算法模型學習訓練所必需的大數據存儲空間和 HPC 能力的問題;
針對車云兩端的交互問題,提出通過車云協同方法將云端上訓練的 AI 模型部署到車端進行執行,完成感知融合、規劃決策等自動駕駛任務。
最終基于車端和云端軟硬件架構形成一套完整的車云協同一體自動駕駛系統。
上一篇:商業的本質是企業要創造獨特的價值
下一篇:新能源和智能網聯“要點”迥異的背后
推薦閱讀
史海拾趣
在電子行業中,Helicomm公司憑借其深厚的技術積累和不斷創新的精神,逐漸嶄露頭角并發展成為業界的佼佼者。以下是關于Helicomm公司發展起來的五個相關故事:
1. ZigBee技術的引領者
自2002年成立以來,Helicomm公司便致力于ZigBee及IEEE 802.15.4標準的研究與產品開發,成為全球ZigBee技術的引領者之一。公司不僅成功完成了IEEE 802.15.4和ZCP的雙重資格認證,還推出了多款經過FCC認證的ZigBee模塊,廣泛應用于市政、安全、監測、物流、定位等領域。Helicomm的ZigBee模塊為客戶搭建了一條從芯片到應用的快速通道,極大地簡化了無線產品的開發流程。(信息來源:百度百科)
2. 技術并購與子公司成立
2005年,Helicomm公司完成了對尉普(WirelessPlug)科技股份有限公司的并購,并成立了赫立訊科技(北京)有限公司,作為其在中國的全資子公司。這一舉措不僅增強了Helicomm在全球無線通訊市場的競爭力,還為其在中國市場的拓展奠定了堅實的基礎。赫立訊科技繼承了尉普在無線傳輸終端產品方面的技術積累,進一步推動了ZigBee等無線通訊技術在中國的應用與發展。(信息來源:安陽市菲云網絡科技有限公司網站)
3. 參與國際標準制定
作為ZigBee聯盟的創始會員之一,Helicomm公司積極參與了ZigBee標準的制定與推廣工作。通過與國際同行的緊密合作與交流,Helicomm不斷提升自身在無線通訊領域的技術實力和影響力。其產品在符合國際標準的同時,也融入了公司的獨特創新,滿足了不同行業客戶的多樣化需求。(信息來源:綜合多個來源)
4. 工業無線監控系統的創新
近年來,Helicomm公司聯合柏元網控、研華科技等合作伙伴,共同推出了針對油田、水利等行業的工業無線監控系統方案。該系統方案充分利用了Helicomm在ZigBee、GSM/GPRS/CDMA等無線通訊技術方面的優勢,結合合作伙伴在軟件監控、硬件采集控制等方面的專長,為相關行業提供了高效、可靠的無線監控解決方案。這一創新不僅提升了行業的智能化水平,也進一步鞏固了Helicomm在無線通訊領域的領先地位。(信息來源:重慶市智暢行物聯科技有限公司網站)
5. 國際市場的拓展
Helicomm公司的產品不僅在中國市場取得了顯著成績,還成功打入國際市場,贏得了廣泛的認可。公司憑借其先進的技術、穩定的產品性能和優質的本地化服務,在國際市場中建立了一席之地。特別是在水利、交通、環保、氣象等領域,Helicomm的無線通訊產品得到了廣泛應用,為全球客戶提供了可靠的無線通訊解決方案。(信息來源:綜合多個來源)
以上五個故事展示了Helicomm公司在電子行業中的發展歷程和成就,體現了其在無線通訊領域的深厚技術實力和不斷創新的精神。
港源公司深知品質是企業生存之本。公司先后通過了ISO9001質量管理體系認證、ISO14001環境體系認證、ISO45001職業健康安全管理體系認證以及IATF16949汽車質量體系認證等國際權威認證。這些認證不僅證明了港源公司在品質管理方面的卓越能力,還為公司贏得了國內外客戶的廣泛信賴和好評。港源公司堅持“誠信、創新、和諧、共贏”的企業核心價值觀,致力于為客戶提供高品質、高可靠性的產品和服務。
隨著技術的不斷進步和市場的不斷變化,Fairview Microwave意識到只有不斷創新才能保持領先地位。因此,公司加大了在研發方面的投入力度,建立起一支高素質的研發團隊。他們不斷推出具有自主知識產權的新產品和技術,為客戶提供更加全面、高效的解決方案。這些創新成果不僅增強了公司的核心競爭力,也為公司在行業內樹立了技術領先的地位。
Fairview Microwave Inc公司成立于1992年,最初只是一個由幾位工程師組成的小團隊,他們致力于開發高質量的射頻和微波組件。在當時,微波技術正逐漸在通信、雷達和衛星通信等領域得到廣泛應用,但市場上缺乏高性能、可靠的組件供應商。Fairview Microwave看到了這個市場空白,決定從適配器、連接器和衰減器等基礎組件入手,憑借精湛的技術和不斷的創新,逐漸在行業內樹立了良好的口碑。
Deutron Electronics Corp深知研發和創新對于公司發展的重要性。因此,公司始終保持著對研發的高投入,不斷引進和培養人才。公司建立了完善的研發體系,鼓勵員工參與創新活動,并為他們提供了充足的資源和支持。這些措施使得Deutron Electronics Corp在研發方面取得了顯著成果,為公司的發展提供了源源不斷的動力。
隨著環保意識的日益提高,Deutron Electronics Corp也積極響應環保號召,致力于實現綠色生產和可持續發展。公司采用環保材料和生產工藝,減少了對環境的污染。同時,公司還加大了對節能減排的投入,提高了資源利用效率。這些努力使得Deutron Electronics Corp在行業內樹立了良好的環保形象,也為公司的長期發展奠定了堅實基礎。
|
164是串入并出,165是并出串入,通常單片機的IO不夠用時,用這兩個是比較不錯的擴展IO方法,164只要兩條線就可以擴展成16個,165要3條線就可以把外部的信號通過串行的方式讀取到單片機,一個擴展輸出,一個擴展輸入。 這種方法已經在硬件上實現了 ...… 查看全部問答∨ |
09儀表交流---my first芯片 D78F1203 913KM001 收到 本帖最后由 paulhyde 于 2014-9-15 09:41 編輯 我們實驗室的到了NEC 這款芯片 D78F1203 913KM001 估計要用!!! … 查看全部問答∨ |
|
記TI M3 Day -- Stellaris family 技術培訓(轉) 這次錯過了,自己下次一定補上,先看看別人的經驗唄: 其實早就該寫這篇文章了,只是由于最近工作比較忙,一時間沒有抽出時間寫,一直拖到現在。趁著目前比較清閑,感覺寫下來,要不還不知道要拖到什么時候。 以前工作的時候,調試觸摸屏芯片ads ...… 查看全部問答∨ |
|
|
請問大家,我通過Ethernet下載Debug Image到開發板上,當Attach Device之后的進度條完成后,開發板就自動重啟了,這是什么原因呢? 開發板板載2個網卡,我用的8139C來下載的鏡像。 Build Options選項是: Enable eboot space in memory; Enable ...… 查看全部問答∨ |
|
|
#include<reg52.h> #include<intrins.h> #define uchar unsigned char #define uint unsigned int uchar temp; uchar tt,idelay,i=0,kk=0,pp=2; void main() { TMOD=0X01; &n ...… 查看全部問答∨ |
用什么命令獲取nand flash的unique id, 有沒有標準的命令啊,google中找到有些flash是用0xED,但用在k9gag08u0m上不行,大家指點啊… 查看全部問答∨ |












 BL-B2324C
BL-B2324C






 京公網安備 11010802033920號
京公網安備 11010802033920號