1 系統方案論證
1.1 系統各模塊方案的選擇與論證
(1)電機驅動模塊。采用L298驅動芯片組成驅動電路,可以通過控制中心輸出的高低電平對電動機的方向進行控制,并且可以通過PWM波直接控制電動機的速度。電路較為簡 ~單,容易實現,驅動能力和抗干擾能力強,性價比高。
(2)LED燈電流調節與光源檢測模塊。發射端通過直流穩壓電源來點亮白光LED,通過調節白光LED兩端的電壓來調節電流從而調節亮度,接收端采用多個光敏電阻,通過光敏電阻阻值的變化來判斷光源的位置。
(3)LED電流檢測模塊。在LED的下端串聯一0.1Ω的電阻,電阻的另一端接地,采用OPA335精密放大器對0.1 Ω電阻的壓降進行放大,再通過AD采樣處理,從而測量計算出流過LED的電流。
1.2 系統組成
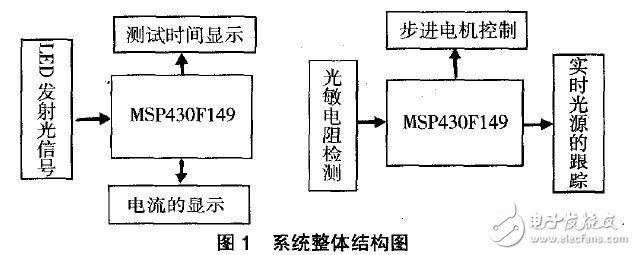
本系統采用兩片TI公司的MSP430F149單片機分別作為發送部分和接受部分的控制核心,完成信號發送和接收、電流檢測、控制電機、鍵盤輸入及液晶顯示等功能。MSP430F149單片機內部資源豐富,集成了A/D模塊,無需擴展引腳,電路設計和制作簡單,功耗低。
外圍電路模塊包括:電機驅動模塊、LED控制模塊、電流檢測模塊、光信號的發射與接收模塊和液晶顯示模塊。
2 理論分析與硬件電路設計
2.1 LED控制和電流檢測電路
LED通過調節LED兩端的電壓,來改變電流,從而實現亮度的調節,可將LED控制電路采用分壓的方式,將LED與一個1OΩ的電阻串聯來對LED分壓,通過調節串聯電路電壓來調節電流,控制LED的亮度。經過計算:

即10Ω 電阻的功率最大值將近1.6W。故10Ω 電阻采用3W的功率電阻。
電壓調整采用LM317,其輸出電壓范圍為:

即可調范圍為4.0 V到8.4V,換算成電流為:
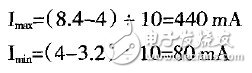
即電流范圍可達80~440 mA,可滿足在150-350 mA的范圍內調節要求。
電流檢測模塊通過測量電路中已知電阻兩端電壓來換算出電流,由于用來測量電壓的電阻阻值要盡量小,故選擇0.1Ω 的功率電阻,并聯的放大器等效電阻可忽略不記,經過計算,0.1 Ω 電阻兩端的壓降在0.008 V~0.042 V之間,電壓值非常小,需要經過一級電壓放大電路。由于單片機的AD采樣內部參考電壓最大值為3.3 V,因此放大后電壓值3.3V以內。
電壓放大采用TI公司的軌到軌運算放大器0PA335,該運放具有良好的電壓放大性能,單電源供電,放大直流信號沒有衰減,連接為同相比例放大。0PA335的輸出接單片機的模擬信號輸入端P6.0,進行AD采樣。電路如圖2所示。
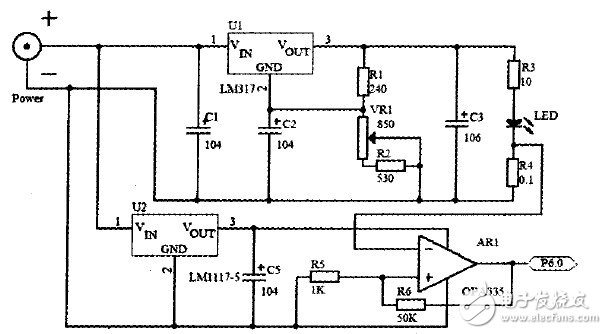
圖2 電流調節與檢測電路
2.3 電機驅動電路
由于采用步進減速電機,電流較大。
經過測量,在7V電壓供電時,電機的電流為1.4A,在5v供電時,電流為0.9 A,系統采用7.2 V的干電池供電,電機驅動芯片需要能夠承受較大的電流。故采用L298作為電機驅動,能承受足夠大的電流。
2.4 檢測光源電路
檢測光源電路的主要原理是通過檢測到光敏電阻的電阻變化,從而引起電壓的變化,單片機通過識別不同的電壓信號來控制電機的轉動。本設計還采用套黑管的方法提高精確度。
將LM324用做電壓比較器,LM324的反向輸入端通過兩個相等的電阻將電源的電壓分半,作為反向輸入端的輸入電壓,在同向輸入端同樣采用分壓的原理,上端連接光敏電阻,下端接一個100K的滑動變阻器來調節光敏電阻的靈敏度。電路如圖3所示。
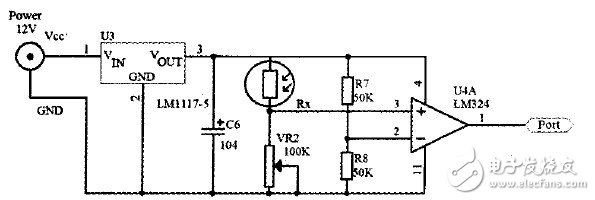
圖3 檢測光源電路
3 控制算法與軟件設計
系統軟件主要分為3個部分:檢測光源、檢測顯示電流、步進電機控制。算法設計也圍繞這3個方面展開。
3.1 控制算法
水平方向用4個光敏電阻來尋找和跟蹤光源,將光敏電阻接入比較器串聯滑動變阻器,接在LM324輸入端,單片機通過電平變化來判斷光源的具體位置。
在沒有檢測到光時,兩個比較器都輸出低電平,當有一個檢測到光時,與此相連的比較器輸出變為高電平,當兩個比較器的輸出都為高電平時,說明此時光源在兩個光敏電阻之間,此時已檢測到光源的中心,控制電機停止。
在光源跟蹤時,通過判斷水平方向兩個比較器的狀態來實現。當左邊的比較器輸出為高電平,右邊輸出低電平時,說明光源左移,控制步進電機左移。同理可控制電機右移。當兩個比較器輸出都為高電平時,說明光源在中心,不用移動。當兩個比較器都輸出低電平時,都沒檢測到光源,此時重新掃描。
由于要實現激光筆對準光源時,將光源支架沿著直線LM平穩緩慢(15秒內)移動60 cm,激光筆能夠連續跟蹤指向光源,而系統采用的減速步進電機可將一個圓周細分為4096步,每個脈沖走的距離約為:

每個脈沖步進3.07 mm,可實現對光源的連續跟蹤。要實現將光源支架沿著直線LM平穩緩慢(15秒內)移動60cm,激光筆能夠連續跟蹤指向光源,當沿直線移動時,光源的豎直高度將發生變化,豎直方向檢測方式類似于水平方向檢測跟蹤,因而可實現整個平面內跟蹤。
3.2軟件設計流程圖
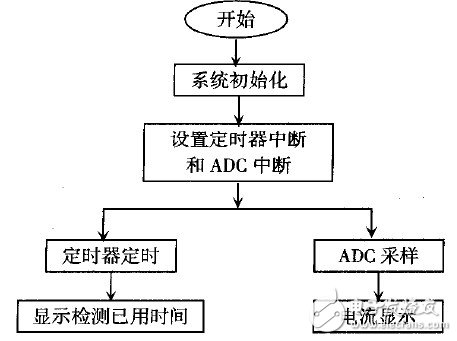
圖4 單片機2流程圖
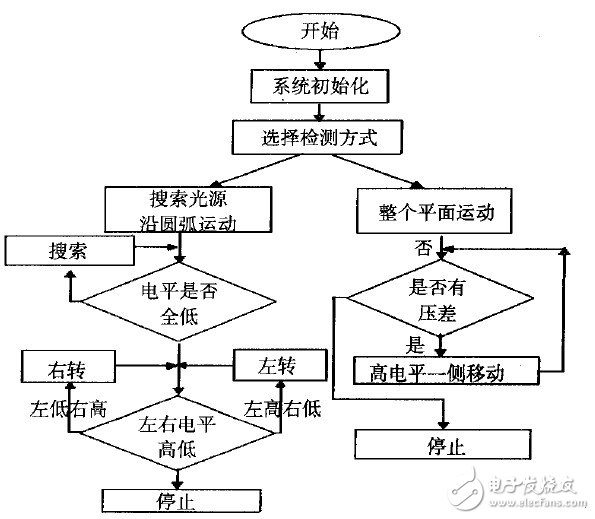
圖5 單片機1流程圖
上一篇:基于MSP430系統時鐘低功耗模式的設置
下一篇:MSP430G2553的引腳功能詳細圖解
推薦閱讀
史海拾趣
Elma Electronic Inc公司在電子封裝市場擁有顯著的領導地位。從VME/VME64x到Rugged COTS封裝,該公司憑借其創新的設計和制造技術,成功地在多個細分市場取得了領先地位。這種領導地位不僅體現在產品的多樣性上,更在于其為客戶提供的高質量、可靠性和性能優異的產品。
為了進一步加速企業的發展,銀河微電決定走上上市之路。經過精心籌備和嚴格審核,公司終于在2021年成功在上交所上市。上市不僅為公司帶來了大量的資金支持,還提高了公司的知名度和品牌影響力。借助上市融資的優勢,銀河微電加大了對研發、生產、銷售等各個環節的投入,企業發展步入快車道。
臺灣德豐股份有限公司(簡稱“臺灣德豐”)自1961年成立以來,一直專注于房屋租售、商業大樓興建等房地產相關業務。公司在長期的經營過程中,形成了穩健的發展風格和良好的市場口碑。臺灣德豐憑借專業的服務團隊和豐富的市場經驗,成功在競爭激烈的房地產市場中占有一席之地。公司的發展不僅為員工創造了良好的工作環境和福利待遇,也為當地經濟的發展做出了積極貢獻。
為了進一步提升公司實力,APX Technologies開始拓展海外市場。公司在多個國家和地區設立了分支機構,并積極招聘當地的優秀人才。通過不斷的努力,APX Technologies的產品逐漸在國際市場上占據了一席之地,公司的規模和影響力也不斷擴大。
Carlo Gavazzi公司由加瓦齊家族在1931年創立,最初可能只是一個小規模的電氣公司。然而,憑借創始人對技術的深刻理解和前瞻性的市場洞察力,公司迅速在行業中嶄露頭角。在隨后的幾十年里,公司不斷擴展業務范圍,逐步建立起自己在電氣和電子領域的地位。
|
我用evc4.0,evcsp33,wince 5.0sdk,wince 5.0模擬器, 可以單獨啟動模擬器,可是用evc建立工程編譯時,報了錯 test_wince_3.exe - 0 error(s), warning(s) Downloading files Failed downloading. 好像是編譯成功后,下載到模擬 ...… 查看全部問答∨ |
|
|
在EW8051的工程中,有兩個文件dmaAlloCannel.c和IRWPAN.h需要用到hal.h中的函數,我已經在dmaAlloCannel.c和IRWPAN.h中加了頭文件include "hal.h"。可是在編譯是還是報這些函數未定義。 請問一下究竟哪 ...… 查看全部問答∨ |
|
|
最近在悉心研究Stellaris 8000系列,依賴著自己過往丁點的單片機經驗,但是還是學的暈暈乎乎。于是萌生了一個想法,還請有經驗的朋友多多幫忙 :何不從技術角度分享下:從其他單片機(51、AVR、STM32、PIC等)轉變到Stellaris的方式、方法。這樣為 ...… 查看全部問答∨ |
ADC10模塊的特點是: 最大轉換速率200ksps; 固定的10位轉換; 具有采樣保持功能,并可選采樣周期; 通過軟件或Timer_A初始化轉換 ; 軟件選擇片內參考電壓(1.5V或 2.5V) & ...… 查看全部問答∨ |
|
看到版主上次發的帖子http://bbs.eeworld.com.cn/thread-314149-1-5.html,很是好奇,當時正在搞智林stm32開發板,于是到處搜集資料,斷斷續續近一周,昨晚終于搞定,先把視頻拿出來分享一下。 還沒有加入幀速控制,所以播放速度有點快,聲音是電 ...… 查看全部問答∨ |
這個板子其實很早前就做好了,但因為忙于freescale的一些板子和公司合作的產品開發,LM3S6911的這塊板子一直做好扔在這里,最近下狠心把板子整理了下,算是定型。LM3S6911相當old了,但對于學TI的stellaris來說還是不錯的選擇,比起9xxx系列是便宜 ...… 查看全部問答∨ |
|
網上講的添加printf()到程序中一般都是這樣的(簡要提一下):1.配置GPIO ,USART,RCC 的Configuration2.勾選usb micro lib3.在程序中添加:(頭文件需要添加#include <stdio.h>)#ifdef __GNUC__#define PUTCHAR_PROTOTYPE int __io_putchar(int ch ...… 查看全部問答∨ |
本帖最后由 jameswangsynnex 于 2015-3-3 20:02 編輯 后臺偷偷運行、流量越耗越大、卸載幾無可能……隨著智能手機的不斷普及,手機預裝軟件在帶給用戶方便的同時,也讓不少消費者感嘆“請神容易送神難”。針對手機預裝軟件帶來的種種問題,在昨日 ...… 查看全部問答∨ |

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 1M3039-034-3811-020.0-33-AB-00-1
1M3039-034-3811-020.0-33-AB-00-1






 京公網安備 11010802033920號
京公網安備 11010802033920號