本篇介紹如何將sqlite3移植到 ARM開發板上,以及在開發板上用 C語言操作sqlite3,操作源碼下載地址:https://www.sqlite.org/download.html,我們直接下載最新版(3.32.3版本),我們把下載后的壓縮包放在了文檔目錄底下:
解壓后創建安裝目錄 mkdir install:

進入解壓后的目錄,配置編譯選項:
[backcolor=rgba(0, 0, 0, 0.03)]./configure --host=arm-linux-gnueabihf --prefix=
[backcolor=rgba(0, 0, 0, 0.03)]/home/ubuntu
[backcolor=rgba(0, 0, 0, 0.03)]/sqlite3/install
[backcolor=rgba(0, 0, 0, 0.03)]/
[backcolor=rgba(0, 0, 0, 0.03)]
--host: 指定交叉編譯工具,和編譯Linux的編譯器一致。
--prefix:指定安裝目錄,編譯后生成的文件放在此目錄,必須是絕對路徑

執行make,make install,完成后如圖 4:
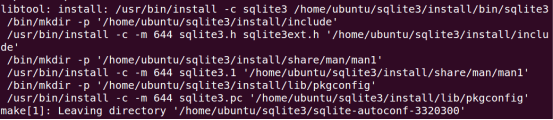
查看install目錄下是否生成了需要的文件。

將lib目錄下的庫文件拷貝到開發板的/lib/目錄下,

將bin目錄下的sqlite3拷貝到開發板的/bin/目錄下,

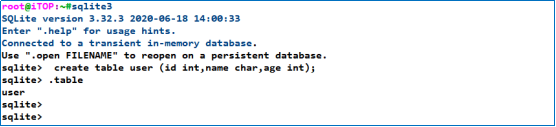
在開發板的終端命令行輸入sqlite3,會進入如圖 8所示:

測試:新建表,輸入 create table user (id int,name char,age int); 然后查詢表,輸入.table,即可查到剛創建的user表,如圖 9所示:
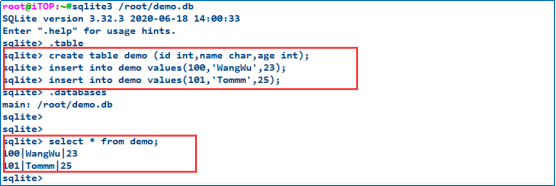
創建.db文件
Sqlite3 /路徑/文件名.db
操作完后一定要輸入.databases。

編寫C代碼測試:
現在數據庫創建表,插入數據:
create table demo (id int,name char,age int);
insert into demo values(100,'WangWu',23);
insert into demo values(101,'Tommm',25);
select * from demo;
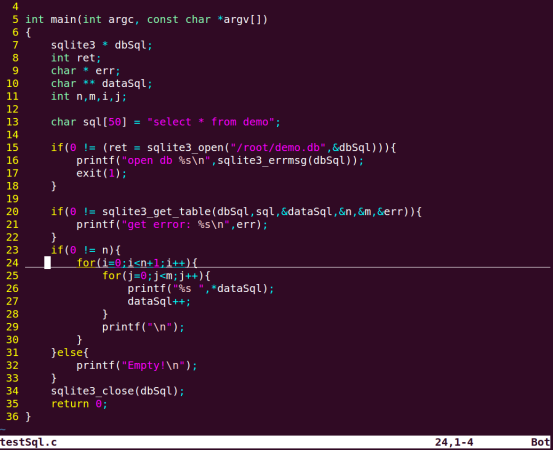
C代碼如下,具體可參照目錄下的demo源碼
交叉編譯
:arm-linux-gnueabihf-gcc -I /home/ubuntu/sqlite3/install/include/ -L /home/ubuntu/sqlite3/install/lib/ -o sql testSql.c -lsqlite3 -ldl
-I指定了sqlite3.h所在路徑,
-L指定sqlite3的lib庫路徑。

將生成的可執行文件拷貝到開發板:

執行后可看到查詢結果:

至此sqlite3的移植和簡單使用介紹結束。
關鍵字:Sqlite3 移植 ARM開發板
引用地址:
Sqlite3移植和使用-移植到ARM開發板上
推薦閱讀最新更新時間:2025-04-23 18:10
ARM+FPGA開發板基于FFMPEG的網絡視頻播放終端——米爾NXP I.MX 8M
ARM+FPGA開發板基于FFMPEG的網絡視頻播放終端——米爾NXP I.MX 8M MINI+ARTIX-7處理器開發板 本篇測評由優秀測評者“qinyunti”提供。 01.前言 米爾這款ARM+fpga開發板具備高性能的ARM MPU+多媒體能力,采用i.MX 8M Mini+Artix-7處理器,特別適合多媒體終端開發。本篇就體驗搭建ffmpeg開發環境,并進行性能測試,進行視頻播放,演示網絡視頻播放器等。 02.編譯過程 交叉編譯 ./configure --cross-prefix=aarch64-linux-gnu- --enable-cross-compile --target-os=l
[嵌入式]
基于arm開發板四個按鍵控制四個燈亮
基于s5pv2410,cortex a8的四個按鍵每一個按鍵點了對應的燈 對于用匯編來編程的話不難,重點在于數據手冊,電路圖,管腳的看懂 直接上代碼 .globl _start _start: ldr r0,=0xe0200c40 @按鍵控制寄存器的地址 ldr r1, bic r1,r1,#0xff @bic一次只能清8為每四位控制一個按鍵 bic r1,r1,#0xff 8 @把16位清為零控制四個按鍵為輸入方式 str r1, @配置按鍵為輸入方式 ldr r0,=0xe0200280 @led燈控制寄存器的地址 ldr r1,=0x1111 str r1, @配置led燈為輸出方式 loop: @循環讀取按鍵的值 ldr
[單片機]
迅為i.MX6ULL開發板移植Gdb+Gdbserver調試
因為有很多小伙伴是從單片機轉過來的,用慣了單片機使用JLINk來調試程序,換到Linux非常不習慣。確實是如此,如果能在Linux上能設置斷點,單步調試,查看變量,那就再好不過了。那么接下來將教大家怎么在arm板上調試應用代碼的方法。 ?首先,了解下基本的思路: 采用這種方式進行遠程調試,目標系統必須包括gdbserver程序,宿主機也必須安裝gdb程序。一般Linux發行版中都有一個可以運行的gdb,但我們不能直接使用該發行版中的gdb來做遠程調試,而要獲取gdb的源代碼包,針對arm平臺做一個簡單的配置,重新編譯得到相應的gdb,如armv4. ?搭建環境 UBuntu版本:Ubuntu 12.04 交叉編譯器:arm-200
[單片機]

在GD32F310開發板上進行MultiTimer移植與分析
先說一下我的需求,首先要在裸機上實現基于離散傅里葉變換的特征信號識別,因為采樣點是864不是基4的,沒法用快速傅里葉變換。對時間的要求較高,但是有一個對時間要求更高的需求故障判斷。 為了保障故障判斷功能模塊,工程大量采用狀態機,對于涉及技術的過程,沒計算兩三步就需要狀態機跳出,對于顆粒度如何劃分只能通過實際的測試進行調試。 看到MultiTimer猜想是否可以在裸機上實現任務的自動切換。下面直接基于小虎的工程進行移植,但是發現MultiTimer文件夾沒有文件,從github上Load下載后進行測試分析。 安裝pack存在如下問題: 別人說MDK版本太低導致,但是我的MDK是正版只支持到5.16a無法進行升級。也在微信群里
[單片機]
u-boot2010.03 移植篇(二)-----修改start.S,支持nand啟動
---------------------------------------------------------- 使用環境 PC: Centos5.4 kernel: 3.0.1 corss: arm-linux-gcc 4.4.1 arm: s3c6410 uboot: uboot-2010-03 ---------------------------------------------------------- uboot的第一階段,其實做的事情也是比較多的,,但是一般來說,重點就是配置各種硬件環境,來保證第二階段能正常啟動. 而該部分根據不同的硬件也是不同的..像我的,s3c6410有2片dr
[單片機]
Linux 藍牙系列 -- ARM-Linux藍牙工具的移植
一 內核修改 ------------------------------------------------------------ 將內核的藍牙做成模塊形式。 并配置如下, Bluetooth subsystem support --- L2CAP protocol support SCO links support RFCOMM protocol support RFCOMM TTY support BNEP protocol support HIDP protocol support (NEW) Bluetooth d
[單片機]
U-Boot移植
1. 安裝韋東山的虛擬版的ubuntu 9, 里面交叉編譯啥的都弄好了, 直接用, 然后把workstation共享目錄打開, 指向uboot的壓縮包所在目錄. 2. 在虛擬機上, 打開ssh, 通過ssh, 進/mnt/hgfs/ 把uboot壓縮包解壓了. 3. 編輯Makefile, 在smdk2400下面增加兩行, 注意要好tab鍵 smdk2400_config : unconfig @$(MKCONFIG) $(@:_config=) arm arm920t smdk2400 NULL s3c24x0 tx2440_config : unconfig @$(MKCONFIG) $(@:_conf
[單片機]
linux-2.6.32在mini2440開發板上移植 SD卡驅動移植
編者:這個驅動還是比較復雜的,先移植著,以后在分析吧。 SD卡驅動移植 1 在內核中注冊SD 設備驅動 Linux-2.6.32.2 已經自帶了S3C2440 芯片的SD 卡驅動,我們只需在初始化代碼中加入SD 平臺設備結構就可以,打開arch/arm/mach-s3c2440/mach-mini2440.c,在nand flash 平臺結構后面添加如下紅色代碼: ;在mini2440.c 的頂部添加SD 卡設備結構所需的頭文件 #include linux/mmc/host.h #include plat/mci.h static struct platform_device mini2440_device_eth = { .n
[單片機]
 STM32G431移植FreeModbus
STM32G431移植FreeModbus C語言高級編程及實例剖析
C語言高級編程及實例剖析 PID控制器的結構及穩定性分析
PID控制器的結構及穩定性分析














 京公網安備 11010802033920號
京公網安備 11010802033920號