11.1實驗內容
通過本實驗主要學習以下內容:
SPI簡介
GD32F470 SPI簡介
SPI NOR FLASH——GD25Q32ESIGR簡介
使用GD32F470 SPI接口實現對GD25Q32ESIGR的讀寫操作
11.2實驗原理
11.2.1SPI簡介
SPI(Serial Peripheral interface),顧名思義是串行外設接口,和UART不同的是,SPI是同步通訊接口,所以帶有時鐘線,而UART是異步通訊接口,不需要時鐘線。
SPI通常使用4根線,分別為SCK、MOSI、MISO、NSS(CS):
SCK:串列時脈,由主機發出
MOSI:主機輸出從機輸入信號(數據由主機發出)
MISO:主機輸入從機輸出信號(數據由從機發出)
NSS:片選信號,由主機發出,一般是低電位有效
SPI默認為全雙工工作,在這種工作模式下,主機通過MOSI線發送數據的同時,也在MISO線上接受數據,簡單來說就是主機和從機之間進行數據交換。
SPI是一個可以實現一主多從的通訊接口,從機的片選由主機NSS腳來控制:

每個通訊時刻,只有一個從機NSS被主機選中,選中方式為主機拉低響應的NSS(CS)腳。
SPI的數據線只有一條(雖然有MOSI和MISO,但實際上每個CLK主機都只能發送和接受一個bit),所以稱之為單線SPI。從SPI衍生出來的還有4線制SPI(QSPI)和8線制SPI(OSPI)以及其他多線制SPI,這個我們后面具體再聊。
11.2.2GD32F470 SPI簡介
GD32F470的主要特性如下:
?具有全雙工和單工模式的主從操作;
? 16位寬度,獨立的發送和接收緩沖區;
? 8位或16位數據幀格式;
?低位在前或高位在前的數據位順序;
?軟件和硬件NSS管理;
?硬件CRC計算、發送和校驗;
?發送和接收支持DMA模式;
?支持SPI TI模式;
?支持SPI NSS脈沖模式
?支持SPI四線功能的主機模式(僅在SPI0中)
以下為GD32F470 SPI的框圖:
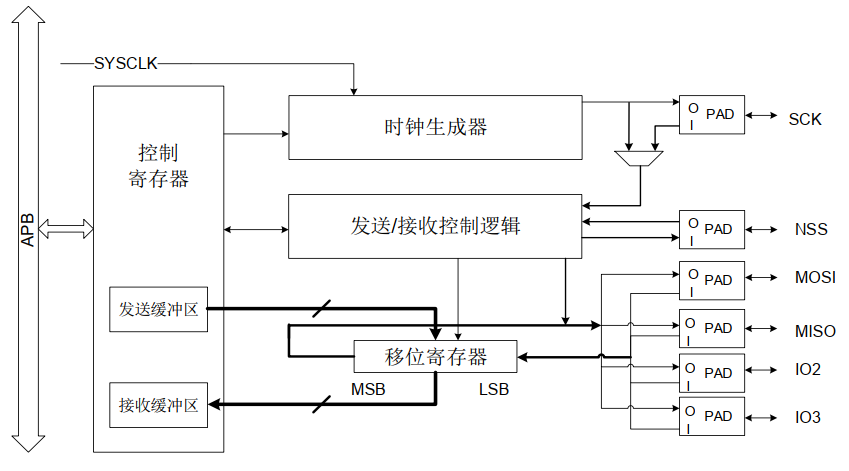
我們可以看到GD32F470有一個發送緩沖區和一個接受緩沖區這兩個緩沖區都對應的是SPI_DATA寄存器,向SPI_DATA寄存器寫數據將會把數據存入發送緩沖區,從SPI_DATA讀數據,將從接受緩沖區獲得數據。GD32F470還有一個移位寄存器,當主機發送緩沖區被寫入數據時,數據將立刻轉移到移位寄存器,移位寄存器通過MOSI信號線將字節傳送給從機,從機也將自己的移位寄存器中的內容通過MISO信號線返回給主機。這樣,兩個移位寄存器中的內容就被交換。外設的寫操作和讀操作是同步完成的。如果只進行寫操作,主機只需忽略接收到的字節;反之,若主機要讀取從機的一個字節,就必須發送一個空字節來引發從機的傳輸。
SPI數據bit在CLK的有效邊沿被鎖存,而有效邊沿是可以選擇的,分別為:
第一個上升沿
第一個下降沿
第二個下降沿
第二個上升沿
通過SPI_CTL0寄存器中的CKPL位和CKPH位來設置有效鎖存沿。其中CKPL位決定了空閑狀態時SCK的電平,CKPH位決定了第一個或第二個時鐘跳變沿為有效采樣邊沿。SPI_CTL0中的LF位可以配置數據順序, 當LF=1時,SPI先發送LSB位,當LF=0時,則先發送MSB位。SPI_CTL0中的FF16位配置數據長度, 當FF16=1時,數據長度為16位,否則為8位。下圖為SPI的時序圖:

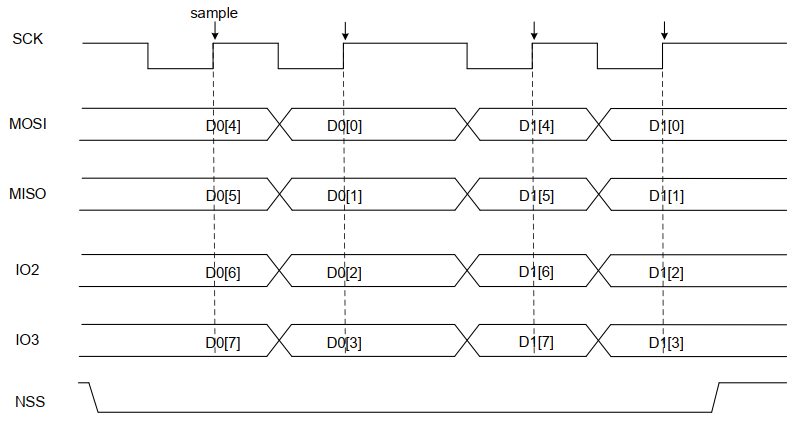
4線SPI(QSPI)的時序圖如下(CKPL=1, CKPH=1, LF=0) ,我們可以看到QSPI是通過MOSI、MISO、IO2、IO3來進行數據收或發,所以QSPI是工作在半雙工模式:
這里再介紹下SPI的NSS(片選)功能。NSS電平由主機來控制,主機將需要操作的從機NSS拉低,從而使該從機在總線上生效。
主機控制NSS的方式有兩種——硬件方式和軟件方式。主機硬件NSS模式下,NSS腳只能選擇特定IO口(具體見datasheet中IO口功能表),當開始進行數據讀寫時,NSS自動拉低,這種方式的優點是主機NSS由硬件自動控制,缺點是只能控制一個從機;主機NSS軟件模式下,NSS可以使用任意IO口,需要控制哪個從機,軟件將對于IO拉低即可,這種方式的優點是可以實現一個主機多個從機的通訊,缺點是軟件需要介入控制NSS腳。
注意:GD32F470 主機硬件NSS模式下,一旦開始第一次數據讀取,NSS被硬件自動拉低后,將不會自行拉高,從機將處于始終被片選的狀態下。 |
從機獲取NSS狀態的方式也有兩種——硬件方式和軟件方式。從機硬件NSS模式下,SPI從NSS引腳獲取NSS電平, 在軟件NSS模式(SWNSSEN = 1) 下,SPI根據SWNSS位得到NSS電平。
SPI除了單線全雙工模式外,還有很多其他方式,比如可以實現只用MOSI進行數據收和發的半雙工通訊,這樣就可以省下MISO用作他處了,具體可以參考GD32F4xxx系列官方用戶手冊。
下面介紹下SPI的發送和接受流程:
發送流程
在完成初始化過程之后, SPI 模塊使能并保持在空閑狀態。在主機模式下, 當軟件寫一個數據到發送緩沖區時,發送過程開始。在從機模式下,當SCK引腳上的SCK信號開始翻轉, 且NSS引腳電平為低, 發送過程開始。 所以, 在從機模式下,應用程序必須確保在數據發送開始前, 數據已經寫入發送緩沖區中。
當 SPI 開始發送一個數據幀時, 首先將這個數據幀從數據緩沖區加載到移位寄存器中,然后開始發送加載的數據。在數據幀的第一位發送之后,TBE(發送緩沖區空) 位置1。TBE標志位置1, 說明發送緩沖區為空, 此時如果需要發送更多數據, 軟件應該繼續寫SPI_DATA寄存器。在主機模式下, 若想要實現連續發送功能, 那么在當前數據幀發送完成前, 軟件應該將下一個數據寫入SPI_DATA寄存器中。
接收流程
在最后一個采樣時鐘邊沿之后, 接收到的數據將從移位寄存器存入到接收緩沖區, 且 RBNE(接收緩沖區非空) 位置1。軟件通過讀SPI_DATA寄存器獲得接收的數據, 此操作會自動清除RBNE標志位。
11.2.3SPI FLASH——GD25Q32ESIGR簡介
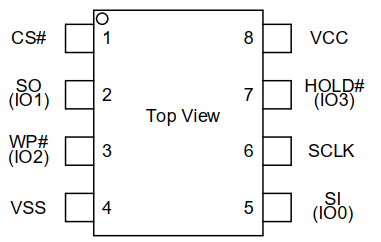
GD25Q32ESIGR是一款容量為32Mbit(即4Mbyte)的SPI接口的NOR FLASH,其支持SPI和QSPI模式,芯片示意圖如下:
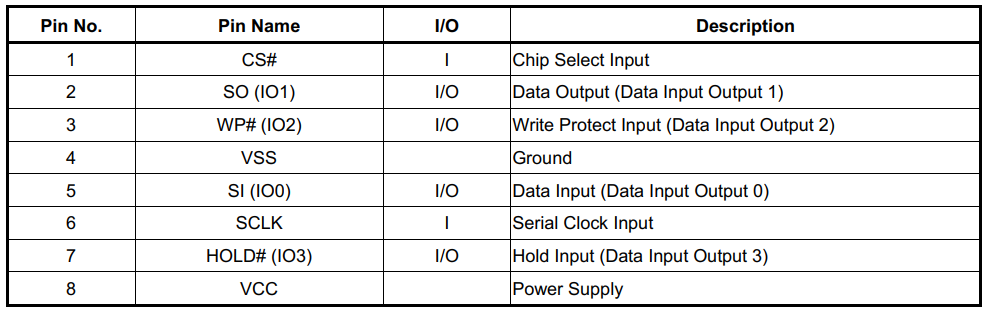
GD25Q32ESIGR管腳定義如下:
GD25Q32ESIGR內部flash結構如下:

下面介紹GD25Q32ESIGR的一些功能碼。
Write Enable (WREN) (06H) :接受到該命令后,GD25Q32ESIGR做好接受數據并進行存儲的準備,時序如下:
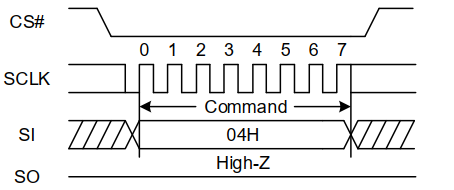
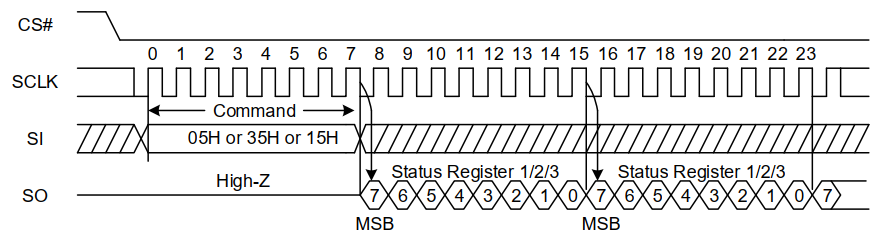
Read Status Register (RDSR) (05H or 35H or 15H) :讀GD25Q32ESIGR的狀態,時序如下:
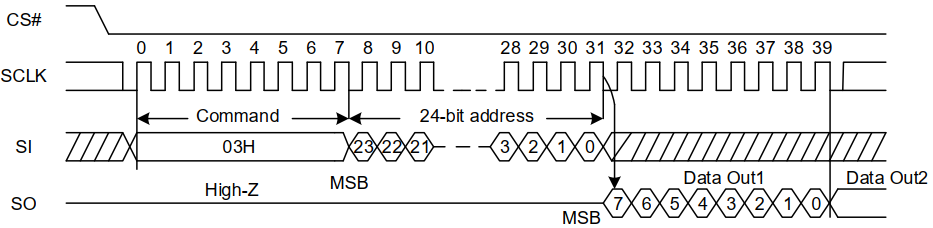
Read Data Bytes (READ) (03H) :接受到該命令后,GD25Q32ESIGR將數據準備好供主機讀走,時序如下:
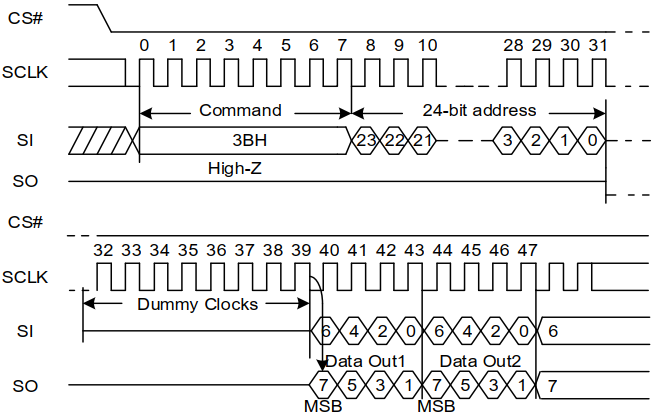
Dual Output Fast Read (3BH) :使GD25Q32ESIGR切換到QSPI模式,時序如下:
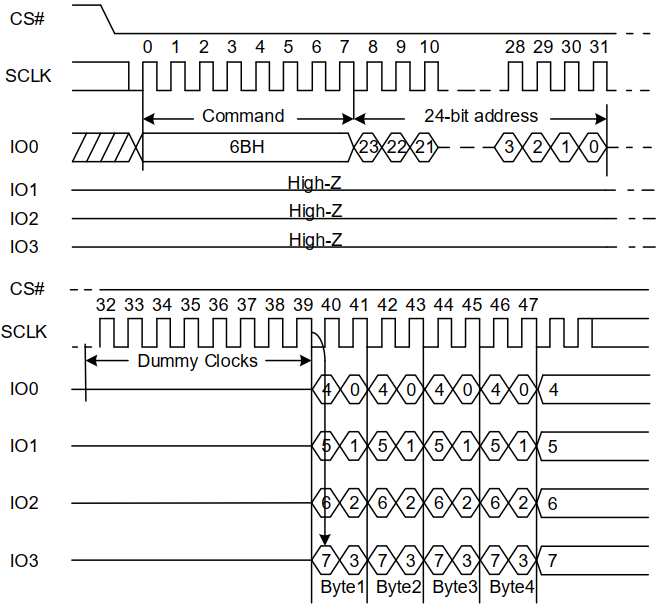
Quad Output Fast Read (6BH) :QSPI讀命令,時序如下:
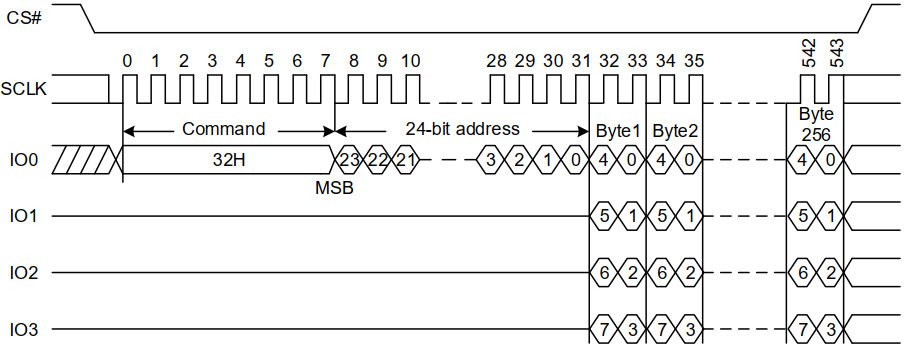
Quad Page Program (32H) :QSPI寫命令,時序如下:
Sector Erase (SE) (20H) :Sector擦除命令,時序如下:

GD25Q32ESIGR就介紹到這里,讀者可以在兆易創新官網下載該NOR FLASH的datasheet以獲取更多信息。
11.3硬件設計
紫藤派開發板SPI——NOR FLASH的硬件設計如下:
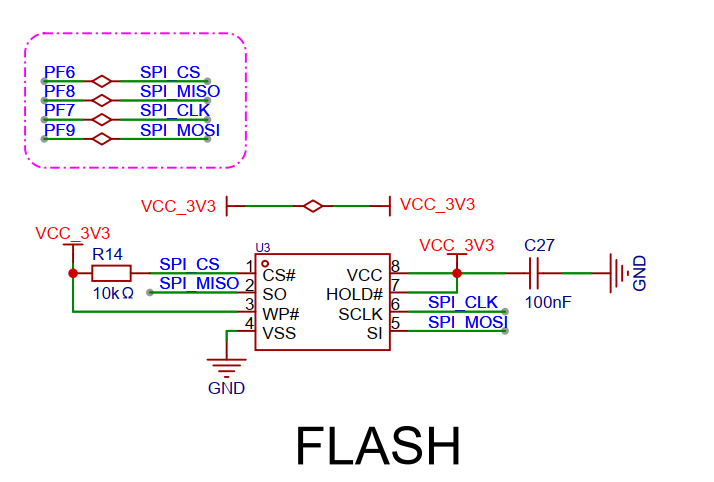
從圖中可以看出,本實驗使用的是普通單線SPI,GD25Q32ESIGR的片選由GD32F470的PF6控制,并采用主機NSS軟件模式,GD25Q32ESIGR的SO、SI和SCLK分別和GD32F470的PF8(SPI4_MISO)、PB9(SPI4_MOSI)以及PF7(SPI4_CLK)相連。
11.4代碼解析
11.4.1SPI初始化函數
在driver_spi.c文件中定義了SPI初始化函數driver_spi_init:
C
void driver_spi_init(typdef_spi_struct *spix)
{
spi_parameter_struct spi_init_struct;
rcu_periph_clock_enable(spix->rcu_spi_x);
/* spi configure */
spi_i2s_deinit(spix->spi_x);
driver_gpio_general_init(spix->spi_cs_gpio);
driver_gpio_general_init(spix->spi_sck_gpio);
driver_gpio_general_init(spix->spi_mosi_gpio);
driver_gpio_general_init(spix->spi_miso_gpio);
if(spix->spi_mode==MODE_DMA)
{
if(spix->spi_rx_dma!=NULL)
{
if(spix->frame_size==SPI_FRAMESIZE_8BIT){
driver_dma_com_init(spix->spi_rx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_8BIT,DMA_PERIPH_TO_MEMORY);
}
else{
driver_dma_com_init(spix->spi_rx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_16BIT,DMA_PERIPH_TO_MEMORY);
}
}
if(spix->spi_tx_dma!=NULL)
{
if(spix->frame_size==SPI_FRAMESIZE_8BIT){
driver_dma_com_init(spix->spi_tx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_8BIT,DMA_MEMORY_TO_PERIPH);
}
else{
driver_dma_com_init(spix->spi_tx_dma,(uint32_t)&SPI_DATA(spix->spi_x),NULL,DMA_Width_16BIT,DMA_MEMORY_TO_PERIPH);
}
}
}
if(spix->spi_cs_gpio!=NULL)
{
driver_gpio_pin_set(spix->spi_cs_gpio);
}
spi_struct_para_init(&spi_init_struct);
/* SPI3 parameter config */
spi_init_struct.trans_mode = SPI_TRANSMODE_FULLDUPLEX;
spi_init_struct.device_mode = spix->device_mode;
spi_init_struct.frame_size = spix->frame_size;
spi_init_struct.clock_polarity_phase = spix->clock_polarity_phase;
if(spix->device_mode==SPI_MASTER){
spi_init_struct.nss = SPI_NSS_SOFT;
}else{
spi_init_struct.nss = SPI_NSS_HARD;
}
spi_init_struct.prescale = spix->prescale;
spi_init_struct.endian = spix->endian;
spi_init(spix->spi_x, &spi_init_struct);
/* enable SPI3 */
spi_enable(spix->spi_x);
}
11.4.2SPI輪訓接受一個數函數
在driver_spi.c文件中定義了使用輪訓方式發送接受一個字節數據函數driver_spi_master_transmit_receive_byte:
C
uint8_t driver_spi_master_transmit_receive_byte(typdef_spi_struct *spix,uint8_t byte)
{
SPI_DATA(spix->spi_x);
SPI_STAT(spix->spi_x);
driver_spi_flag_wait_timeout(spix,SPI_FLAG_TBE,SET);
spi_i2s_data_transmit(spix->spi_x,byte);
DRV_ERROR==driver_spi_flag_wait_timeout(spix,SPI_FLAG_RBNE,SET);
return spi_i2s_data_receive(spix->spi_x);
}
上面函數中有帶超時功能的等待SPI狀態的函數driver_spi_flag_wait_timeout,該函數定義在driver_spi.c:
C
Drv_Err driver_spi_flag_wait_timeout(typdef_spi_struct *spix, uint32_t flag ,FlagStatus wait_state)
{
uint64_t timeout = driver_tick;
while(wait_state!=spi_i2s_flag_get(spix->spi_x, flag)){
if((timeout+SPI_TIMEOUT_MS) <= driver_tick) {
return DRV_ERROR;
}
}
return DRV_SUCCESS;
}
11.4.3SPI NOR FLASH 接口bsp層函數
操作NOR FLASH的函數都定義在bsp層文件bsp_spi_nor.c中,這個文件中定義的函數都是針對NOR FLASH特性來實現的,我們選取幾個函數進行介紹。
NOR FLASH按sector擦除函數bsp_spi_nor_sector_erase,該函數流程是:使能NOR FLASH的寫功能->拉低片選->向NOR FLASH發送sector擦除指令SE(0x20)->從低地址到高地址發送需要擦除的地址->拉高片選->等待NOR FALSH內部操作完成(循環去讀NOR FLASH狀態,直到讀出編程狀態為0)
C
void bsp_spi_nor_sector_erase(uint32_t sector_addr)
{
/* send write enable instruction */
bsp_spi_nor_write_enable();
/* sector erase */
/* select the flash: chip select low */
bsp_spi_nor_cs_low();
/* send sector erase instruction */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,SE);
/* send sector_addr high nibble address byte */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,(sector_addr & 0xFF0000) >> 16);
/* send sector_addr medium nibble address byte */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,(sector_addr & 0xFF00) >> 8);
/* send sector_addr low nibble address byte */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,sector_addr & 0xFF);
/* deselect the flash: chip select high */
bsp_spi_nor_cs_high();
/* wait the end of flash writing */
bsp_spi_nor_wait_for_write_end();
}
2.按page寫數據函數bsp_spi_nor_page_write,該函數實現在page范圍內寫數據,該函數流程是:使能NOR FLASH的寫功能->拉低片選->向NOR FLASH發送寫指令WRITE(0x02)->從低地址到高地址發送要寫的地址(每次進行寫數據時,只需要給初始地址即可,寫完一個數據后NOR FLASH內部會自動把地址+1)->寫數據->拉高片選->等待NOR FALSH內部操作完成(循環去讀NOR FLASH狀態,直到讀出編程狀態為0)
C
void bsp_spi_nor_page_write(uint8_t* pbuffer, uint32_t write_addr, uint16_t num_byte_to_write)
void bsp_spi_nor_page_write(uint8_t* pbuffer, uint32_t write_addr, uint16_t num_byte_to_write)
{
/* enable the write access to the flash */
bsp_spi_nor_write_enable();
/* select the flash: chip select low */
bsp_spi_nor_cs_low();
/* send 'write to memory' instruction */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,WRITE);
/* send write_addr high nibble address byte to write to */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,(write_addr & 0xFF0000) >> 16);
/* send write_addr medium nibble address byte to write to */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,(write_addr & 0xFF00) >> 8);
/* send write_addr low nibble address byte to write to */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,write_addr & 0xFF);
/* while there is data to be written on the flash */
while(num_byte_to_write--){
/* send the current byte */
driver_spi_master_transmit_receive_byte(&BOARD_SPI,*pbuffer);
/* point on the next byte to be written */
pbuffer++;
}
/* deselect the flash: chip select high */
bsp_spi_nor_cs_high();
/* wait the end of flash writing */
bsp_spi_nor_wait_for_write_end();
}
3.按buffer寫數據函數bsp_spi_nor_buffer_write,該函數實現任意長度數據寫入,使用page寫函數搭配算法,可以跨page進行寫數據:
C
void bsp_spi_nor_buffer_write(uint8_t* pbuffer, uint32_t write_addr, uint16_t num_byte_to_write)
{
uint8_t num_of_page = 0, num_of_single = 0, addr = 0, count = 0, temp = 0;
addr = write_addr % SPI_FLASH_PAGE_SIZE;
count = SPI_FLASH_PAGE_SIZE - addr;
num_of_page = num_byte_to_write / SPI_FLASH_PAGE_SIZE;
num_of_single = num_byte_to_write % SPI_FLASH_PAGE_SIZE;
/* write_addr is SPI_FLASH_PAGE_SIZE aligned */
if(0 == addr){
/* num_byte_to_write < SPI_FLASH_PAGE_SIZE */
if(0 == num_of_page)
bsp_spi_nor_page_write(pbuffer,write_addr,num_byte_to_write);
/* num_byte_to_write > SPI_FLASH_PAGE_SIZE */
else{
while(num_of_page--){
bsp_spi_nor_page_write(pbuffer,write_addr,SPI_FLASH_PAGE_SIZE);
write_addr += SPI_FLASH_PAGE_SIZE;
pbuffer += SPI_FLASH_PAGE_SIZE;
}
bsp_spi_nor_page_write(pbuffer,write_addr,num_of_single);
}
}else{
/* write_addr is not SPI_FLASH_PAGE_SIZE aligned */
if(0 == num_of_page){
/* (num_byte_to_write + write_addr) > SPI_FLASH_PAGE_SIZE */
if(num_of_single > count){
temp = num_of_single - count;
bsp_spi_nor_page_write(pbuffer,write_addr,count);
write_addr += count;
pbuffer += count;
bsp_spi_nor_page_write(pbuffer,write_addr,temp);
}else
bsp_spi_nor_page_write(pbuffer,write_addr,num_byte_to_write);
}else{
/* num_byte_to_write > SPI_FLASH_PAGE_SIZE */
num_byte_to_write -= count;
num_of_page = num_byte_to_write / SPI_FLASH_PAGE_SIZE;
num_of_single = num_byte_to_write % SPI_FLASH_PAGE_SIZE;


上一篇:基于GD32E505的3KW諧振型直流變壓器方案
下一篇:關于GD32F190R8的模擬信號采集與顯示裝置設計的分析和應用
推薦閱讀最新更新時間:2025-05-20 19:47

 一種基于深度學習的框架,用于具有密集焦點損失和遮擋的生態環境中的目標識別(英文)
一種基于深度學習的框架,用于具有密集焦點損失和遮擋的生態環境中的目標識別(英文) PID控制器的結構及穩定性分析
PID控制器的結構及穩定性分析設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- 使用 Diodes Incorporated 的 PT8A 3518CPE 的參考設計
- P1020RDB: QorIQ? P1020和P1011參考設計板
- LTC2602CMS8 演示板,雙 16 位軌至軌 Vout DAC
- 基于ISD4002-120錄音回放的ISD-ES302、ES302演示板
- 使用 Diodes Incorporated 的 ZSAT600 的參考設計
- 聲控LED燈
- 1117 電壓調節器的簡易板
- DER-857 - 基于具有PowiGaN技術的LYTSwitch-6的65 W高功率因數、隔離反激式和開關填谷PFC LED驅動器
- 隨機數發生器
- CAT4252EVAL、AN??D9010/D CAT4252 LED 驅動器評估板













 京公網安備 11010802033920號
京公網安備 11010802033920號