不同的平臺的匯編代碼是不一樣的,最早的匯編在50年代就發(fā)明了,比很多人的父母的年齡都大,老掉牙,不用學(xué)習(xí)怎么寫匯編。一個公司有一個人知道怎么寫匯編就夠了。但要學(xué)習(xí)讀匯編,為什么學(xué)習(xí)匯編? 1、性能 直接翻譯為機器語言,性能最高。優(yōu)秀的C語言效率只能達(dá)到匯編的80%左右。其他高級語言跟匯編一比差得更遠(yuǎn)。語言越高級性能越差。很多bootloader和BIOS用匯編寫,匯編操作的是電腦,手機剛剛上電時,硬件和初始化的那些命令,它們的性能的要求比較高,效率高開機速度更快。
分析問題 個人認(rèn)為,編程人與機器對話,我們寫C,寫JAVA,但是電腦并不認(rèn)識這些語言,電腦只認(rèn)識0和1;所以需要一個人來翻譯這些語言,這個翻譯官就是編譯器,但是編譯器不能百分之百準(zhǔn)確的表達(dá)程序員的意思,也就是所謂的翻譯有反義。例如,編譯器為了性能好一點,可能會優(yōu)化變量和語句,這個過程可能好心辦壞事,把有用的操作優(yōu)化了。因此只有看懂一些匯編語句,才能分析程序真正執(zhí)行的流程。在問題難以定位的情況下,匯編可能是分析問題的最后一根稻草。 幫助理解硬件 有些學(xué)校的單片機課程是以匯編進行教學(xué)的,主要原因就是匯編更貼近硬件。不過我不贊成這種做法,C語言能快速做出一點東西,有利于學(xué)生在放棄之前,增加成就感,好堅持下去。但是匯編確實更貼近硬件。
LDR指令
為了便于理解下文,先介紹下LDR指令,其格式如下:
LDR{條件} 目的寄存器 <存儲器地址> 作用:將 存儲器地址 所指地址處連續(xù)的4個字節(jié)(1個字)的數(shù)據(jù)傳送到目的寄存器中。LDR指令的尋址方式比較靈活,實例如下:
LDR R0,[R1] ;將存儲器地址為R1的字?jǐn)?shù)據(jù)讀入寄存器R0。LDR R0,[R1,R2] ;將存儲器地址為R1+R2的字?jǐn)?shù)據(jù)讀入寄存器R0。LDR R0,[R1,#8] ;將存儲器地址為R1+8的字?jǐn)?shù)據(jù)讀入寄存器R0。LDR R0,[R1],R2 ;將存儲器地址為R1的字?jǐn)?shù)據(jù)讀入寄存器R0,并將R1+R2的值存入R1。LDR R0,[R1],#8 ;將存儲器地址為R1的字?jǐn)?shù)據(jù)讀入寄存器R0,并將R1+8的值存入R1。LDR R0,[R1,R2]! ;將存儲器地址為R1+R2的字?jǐn)?shù)據(jù)讀入寄存器R0,并將R1+R2的值存入R1。LDR R0,[R1,LSL #3] ;將存儲器地址為R1*8的字?jǐn)?shù)據(jù)讀入寄存器R0。LDR R0,[R1,R2,LSL #2] ;將存儲器地址為R1+R2*4的字?jǐn)?shù)據(jù)讀入寄存器R0。LDR R0,[R1,,R2,LSL #2]!;將存儲器地址為R1+R2*4的字?jǐn)?shù)據(jù)讀入寄存器R0,并將R1+R2*4的值存入R1。LDR R0,[R1],R2,LSL #2 ;將存儲器地址為R1的字?jǐn)?shù)據(jù)讀入寄存器R0,并將R1+R2*4的值存入R1。LDR R0,Label ;Label為程序標(biāo)號,Label必須是當(dāng)前指令的-4~4KB范圍內(nèi)。要注意的是:
LDR Rd,[Rn],#0x04 ;這里Rd不允許是R15。 另外LDRB 的指令格式與LDR相似,只不過它是將存儲器地址中的8位(1個字節(jié))讀到目的寄存器中。LDRH的指令格式也與LDR相似,它是將內(nèi)存中的16位(半字)讀到目的寄存器中。
LDR R0,=0xff 這里的LDR不是arm指令,而是偽指令。這個時候與MOVE很相似,只不過MOV指令后的立即數(shù)是有限制的。這個立即數(shù)必須是0X00-OXFF范圍內(nèi)的數(shù)經(jīng)過偶數(shù)次右移得到的數(shù),所以MOV用起來比較麻煩,因為有些數(shù)不那么容易看出來是否合法。 2、如何在KEIL下閱讀匯編 按d進入debug模式,在view下選擇disassembly window 。
看光標(biāo),c文件下指向了main函數(shù)的第一行。 匯編窗口也指向了對應(yīng)的語句。但是,在執(zhí)行C語言的第一行之前,仍然有許多操作要做,比如變量放在哪?在哪里調(diào)用了main函數(shù)等,這些操作都被集成開發(fā)環(huán)境IDE給封裝起來了。我們必須知道,在執(zhí)行main函數(shù)之前,有許多事情要做,只不過,初學(xué)的時候不必理會。以下是C語言源碼,功能是點亮LED。
//main.c#include int main(void){ RCC->APB2ENR |= RCC_APB2ENR_IOPBEN; GPIOB->CRL &= ~(0xf<<(1*4)); GPIOB->CRL |= 0x2<<(1*4); GPIOB->ODR &= ~(1<<1); return 0; } //main.h#define RCC_APB2ENR (*(unsigned int *)0x40021018)#define GPIOB_CRL (*(unsigned int *)0x40010c00)#define GPIOB_ODR (*(unsigned int *)0x40010c0c) 匯編窗口往上翻,確實很多語句,先看這幾行代碼的匯編:
先說最常用的兩句匯編:
LDR r0,[r1] r0 = *r1 STR r0,[r1] *r1 = r0 MOVr0,r1r1->r0拷貝

從內(nèi)存0x0800 017c的32位數(shù)據(jù)拷貝到r0:
r0 = * 0x0800 017c 我們看到的 1000 4002其實 就是0x4002 1000。這里邊有個知識點叫做大小端模式,以下簡單講解,不能理解就記住。
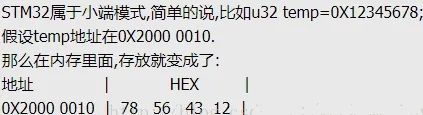
這個數(shù)據(jù)是在地址是這么存放的: 7C 7D 7E 7F 00 10 02 40 實際數(shù)據(jù)是0x4002 1000
* 0x0800 017c=0x4002 1000 然后r0的值+0x18也就是24 因為這個是第6號(第6號就是第7個的意思)元素 得到r0 = *0x4002 1018,r0的值由一個地址,變成了地址所存放的數(shù)據(jù)。 然后是或0x08操作,結(jié)果再復(fù)制給r0,*0x4002 1018 |=0x08 給r1分配地址,這個地址也是0x4002 1000, r1 = *0x4002 1000 把r0存放的值,(不是r0的地址,)存到r1+18的空間上 *(r1+0x18) = r0 *0x4002 1018 = (*0x4002 1018 |=0x08) *0x4002 1018|=0x08 最終結(jié)果:地址4002 1018的數(shù),執(zhí)行了或0x08的操作。再分析下一句 :
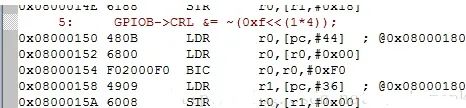
前兩句給r0分配空間,r0 = *0x4001 0c00 然后用BIC清除數(shù)據(jù)位,把4-7位清零,結(jié)果再賦值給r0。
*0x4001 0c00 &= ~(0xf0) r1 = *0x4001 0c00 *0x4001 0c00 &= ~(0xf0)
剩下的不再詳細(xì)分析,直接給答案:
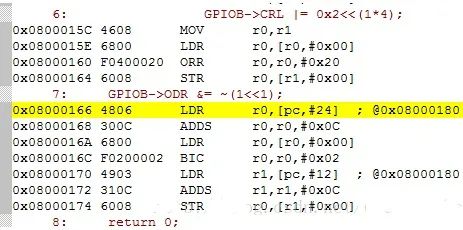
***0x4001 0c00 |= 0x20 0x4001 0c0c &= ~(0x02)* 最終,可以看到C語句被翻譯成了意料之中的匯編語句,自己的意圖被機器準(zhǔn)確的理解了。
上一篇:深度解析鏈表在STM32中的應(yīng)用
下一篇:STM32單片機GPIO的配置模式
推薦閱讀最新更新時間:2025-06-22 06:08

- 熱門資源推薦
- 熱門放大器推薦
 【Follow me第三季第1期】任務(wù)三:Arduino環(huán)境運動傳感器數(shù)據(jù)讀取
【Follow me第三季第1期】任務(wù)三:Arduino環(huán)境運動傳感器數(shù)據(jù)讀取 Follow me第三季第1期STM32F429作品代碼
Follow me第三季第1期STM32F429作品代碼 射頻電路設(shè)計
射頻電路設(shè)計 5962-8959401XC
5962-8959401XC設(shè)計資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析

- Microchip 升級數(shù)字信號控制器(DSC)產(chǎn)品線 推出PWM 分辨率和 ADC 速度業(yè)界領(lǐng)先的新器件
- 意法半導(dǎo)體STM32MP23x:突破成本限制的工業(yè)AI應(yīng)用核心
- 意法半導(dǎo)體推出用于匹配遠(yuǎn)距離無線微控制器STM32WL33的集成的匹配濾波芯片
- ESP32開發(fā)板連接TFT顯示屏ST7789跳坑記
- 如何讓ESP32支持analogWrite函數(shù)
- LGVL配合FreeType為可變字體設(shè)置字重-ESP32篇
- 使用樹莓派進行 ESP32 Jtag 調(diào)試
- ESP32怎么在SPIFFS里面存儲html,css,js文件,以及網(wǎng)頁和arduino的通訊
- ESP32 freeRTOS使用測試

- 在隔離應(yīng)用中使用 AD7740
- DC2373A,使用 LT8641 65V、3.5A 微功率同步降壓靜音開關(guān)的演示板
- Tda7385 4 X 30W 四橋車載收音機放大器的典型應(yīng)用
- 時間控制板 帶均衡
- 手持無線電通訊器
- 使用 Analog Devices 的 AD8033AKS 的參考設(shè)計
- #第五屆立創(chuàng)電子設(shè)計大賽#QCC5124藍(lán)牙高保真播放器
- 使用 ROHM Semiconductor 的 BD5244 的參考設(shè)計
- AM2G-0518SH30Z 18V 2 瓦 DC/DC 轉(zhuǎn)換器的典型應(yīng)用
- 基于STUSB4500的即用型USB PD控制器評估板






- 為什么電源紋波測試結(jié)果與理論設(shè)計如此之大?
- UWB信標(biāo)與LoRa基站網(wǎng)關(guān)數(shù)據(jù)區(qū)別在哪里?
- 什么是AI 同傳技術(shù)
- 人工智能處理器和加速器到底是什么?
- PWM控制(脈沖寬度調(diào)制)的基本原理是什么
- 如何設(shè)計帶集成運放構(gòu)成的方波發(fā)生器
- DSP調(diào)度算法的基本概念和原理
- 什么是集成動力總成? 集成動力總成的優(yōu)勢在哪里
- 鐵威馬 D5/D8 Hybrid:精準(zhǔn)擴容時代的“5+8”雙引擎
- MOMAX摩米士堅守品質(zhì)承諾,移動電源符合國家 CCC 認(rèn)證及航空UN38.3安全標(biāo)準(zhǔn)







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號