項目簡介
利用CubMX生成基于32單片機的HAl庫工程,然后編寫程序在proteus上仿真驗證。本項目最適合沒有開發(fā)板的同學(xué)學(xué)習(xí),零成本利用仿真軟件率先入門STM32單片機。這是第六部分針對STM32單片機內(nèi)置TIM模塊的PWM波形產(chǎn)生的學(xué)習(xí)和理解。
硬件模塊
STM32F103R4
軟件工具
CubMX
Proteus
KEIL
電路連接圖

工作流程
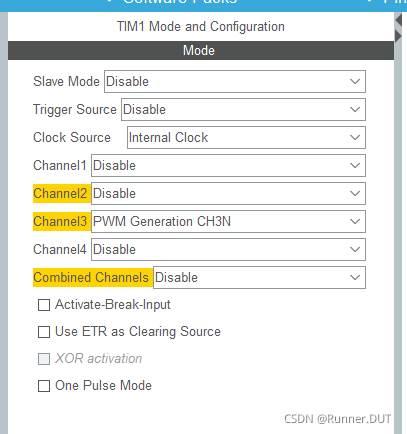
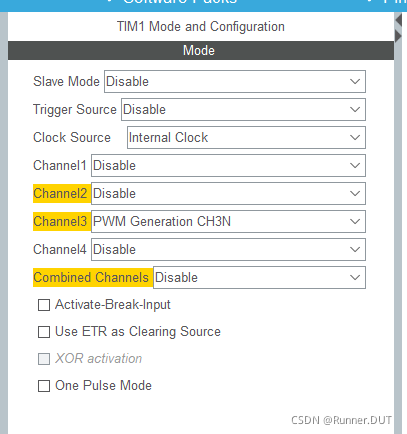
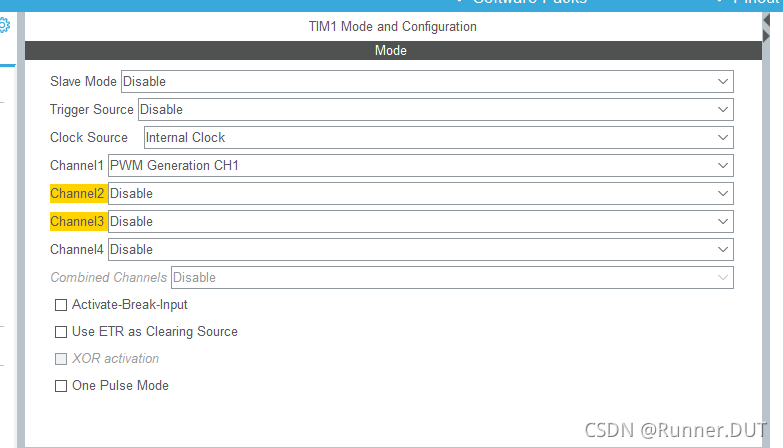
首先,在CubMX種設(shè)置號一些參數(shù),選擇TIM1定時器,按下圖設(shè)置好工作模式。輸出PWM的引腳是PB15引腳。
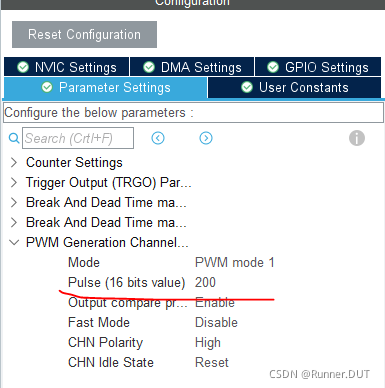
然后再按下圖設(shè)置好預(yù)分頻和計數(shù)值
最好設(shè)置好占空比,占空比=Pulse/Per,比如想要設(shè)置占空比為20%,而上面設(shè)置了計數(shù)值為1000,那么按照這個占空比,就照下圖設(shè)置好Pulse為200即可。
然后生成工程。
增加輸出PWM的代碼。
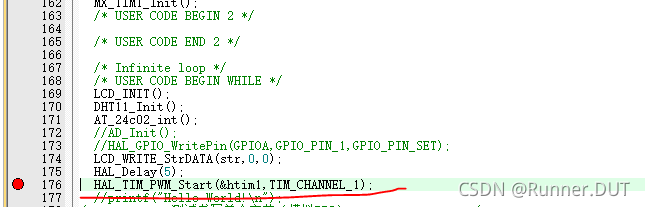
出現(xiàn)問題了,上網(wǎng)查了一下好像是超出了單片機內(nèi)部的資源。網(wǎng)上推薦的方法是直接換一個型號的32單片機,但是我不想用這種方法,后來我刪掉一行有浮點運算的Printf函數(shù)就可以了,可能是printf用的太多了,太占內(nèi)存。可以運行了,但是一開始還是沒有PWM波形輸出,于是我換了個通道,如下圖。
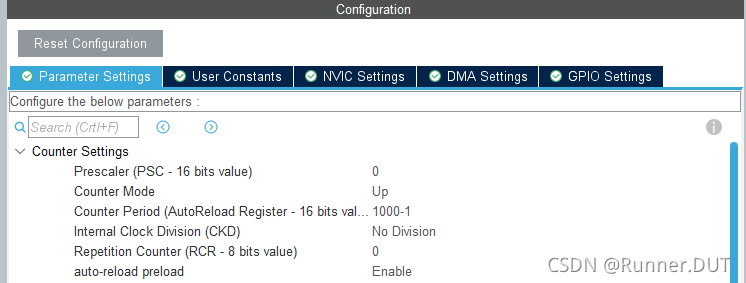
Prescaler:分頻值,可以設(shè)置為0
Counter Mode:計數(shù)模式
Counter Period:自動裝載值
Auto-reload preload:使能自動裝載功能
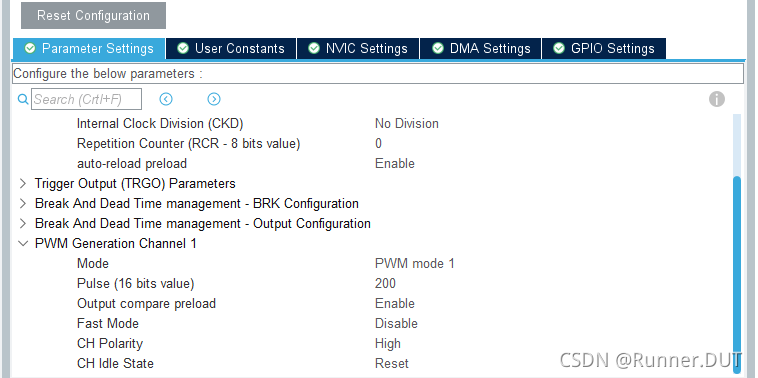
Mode:PWM波模式
Pulse:計數(shù)比較值
CH Polarity:輸出極性
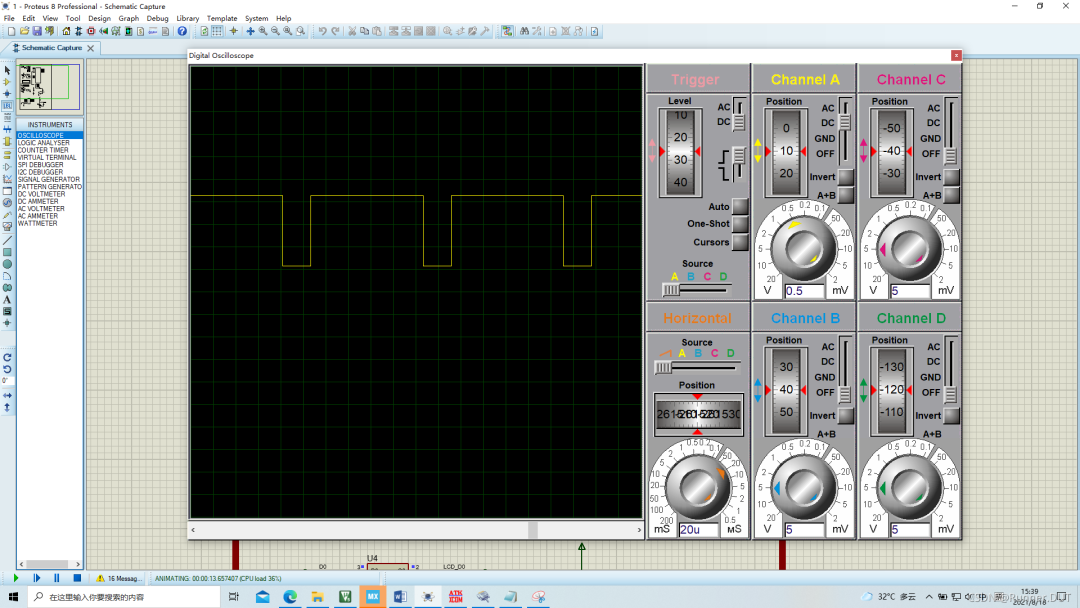
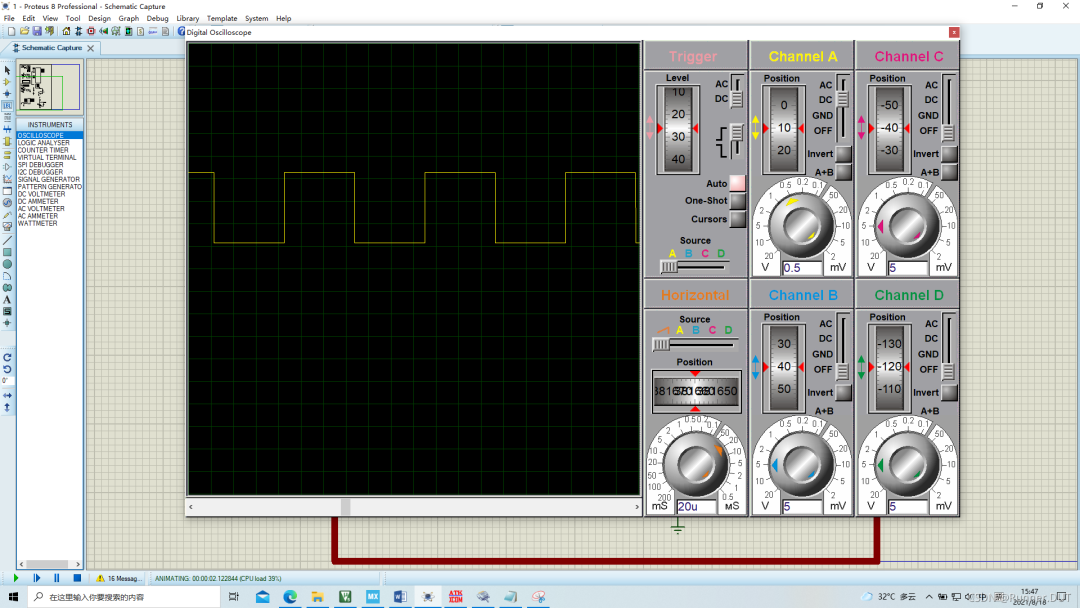
輸出的結(jié)果如下圖,這是20%的
然后改變占空比為50%

輸出波形
至此,PWM模塊完成。
程序代碼
mian.c
int main(void)
{
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
// MX_ADC1_Init();
// MX_USART1_UART_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */;
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);//開啟PWM波形輸出
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500); //改變占空比,500/1000=50%
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
上一篇:硬件電路設(shè)計之STM32最小系統(tǒng)電路設(shè)計
下一篇:STM32F407 GPIO口輸出配置配置步驟
推薦閱讀最新更新時間:2025-05-31 12:42

 匠人手記:一個單片機工作者的實踐
匠人手記:一個單片機工作者的實踐 2023年F題-基于聲傳播的智能定位系統(tǒng)-技術(shù)報告
2023年F題-基于聲傳播的智能定位系統(tǒng)-技術(shù)報告 相控陣天線手冊(英文)
相控陣天線手冊(英文)設(shè)計資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析

- 人形機器人馬拉松背后的思考,兆易創(chuàng)新如何賦能機器人產(chǎn)業(yè)
- 一種基于STM32的智能柜控制器設(shè)計
- 小型傾轉(zhuǎn)旋翼機的無刷直流電機驅(qū)動器設(shè)計
- 超高速攝影機電控系統(tǒng)設(shè)計
- 基于GPS自動授時的無線智能控制器的設(shè)計
- 基于PTR2000的無線氣象信息采集系統(tǒng)設(shè)計
- Microchip推出MEC175xB系列器件,為嵌入式控制器引入硬件 抗量子攻擊能力
- 無人飛行器機載穩(wěn)定云臺控制系統(tǒng)的設(shè)計
- 匠芯創(chuàng)推出面向具身智能高性能實時處理器M7000

- LT6656BIS6-3、3V 電壓基準(zhǔn)作為微功率穩(wěn)壓器的典型應(yīng)用
- 實施血糖儀和血壓監(jiān)測儀醫(yī)療設(shè)備
- 用于電池充電器的 6V AC 到 DC 單路輸出電源
- ADZS-BF518F-EZBRD、ADSP-BF518F EZ-Board 評估板基于 ADSP-BF51xF Blackfin 數(shù)字信號處理器 (DSP)
- 游戲(LOL)專用鍵盤 帶閃現(xiàn)計時
- 用于開/關(guān)控制應(yīng)用的 AM2G-4812SH30Z 12V 2 瓦 DC-DC 轉(zhuǎn)換器的典型應(yīng)用
- AD6643-250EBZ,用于評估 AD6643 模數(shù)轉(zhuǎn)換器的評估板
- 2.9寸/1.54寸桌面墨水屏擺件
- 液晶電視電源用DC轉(zhuǎn)DC單路輸出電源
- 典型應(yīng)用使用 TC7116A 模數(shù)轉(zhuǎn)換器獲得 2V 滿量程的推薦組件值






- 通用汽車轉(zhuǎn)向LFP電池,LG新能源和三星SDI擬在美建廠
- 蓋世汽車研究院:政策助推疊加技術(shù)迭代 全固態(tài)電池蓄勢待發(fā)
- 小鵬汽車董事長預(yù)測:2027年激光雷達非智能駕駛必備
- 解碼大眾汽車中國戰(zhàn)略 - 決戰(zhàn)智能化電氣化的三板斧
- 2025從具身智能大腦展望人形機器人發(fā)展
- “荊楚”人形機器人即將量產(chǎn),智能時代的新篇章!
- 小鵬純視覺方案:技術(shù)突圍與市場下沉的雙重博弈
- 為什么無人出租車能“零”事故,而智能駕駛輔助卻事故頻發(fā)?
- 重磅!一顆要顛覆全球智駕的芯片點亮了!
- 3D視覺技術(shù)為工業(yè)自動化帶來新“視界”







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號