一、什么是FOC?
FOC是Field Orientation Control的縮寫,字面意思是場方向控制,在電機應用場景下就是磁場方向控制。
現在問題來了,挖掘技術哪家強?不是,走錯了再來,那么問題來了,就不能像小時候四驅賽車馬達一樣,通個電直接就轉了,不簡單粗暴多了,為啥電機控制就要用到FOC呢?這個問題得問你啊,你不用它不就沒有那么多屁事了。
二、學習門檻
FOC是關于電機的一種驅動方式,由于這個東西過于高深,不建議啥都不懂的小伙伴學習,所以要了解并使用它,得具有以下理論基礎:
初中物理,部分電磁學,需要明白如何由電生磁。
高中物理,力的分解與合成。
高中數學,向量運算,向量=矢量;三角函數。
電路、程序基礎,這個就不用多說了,懂的都懂。
三、電機構成
電機分類大概如下所示。
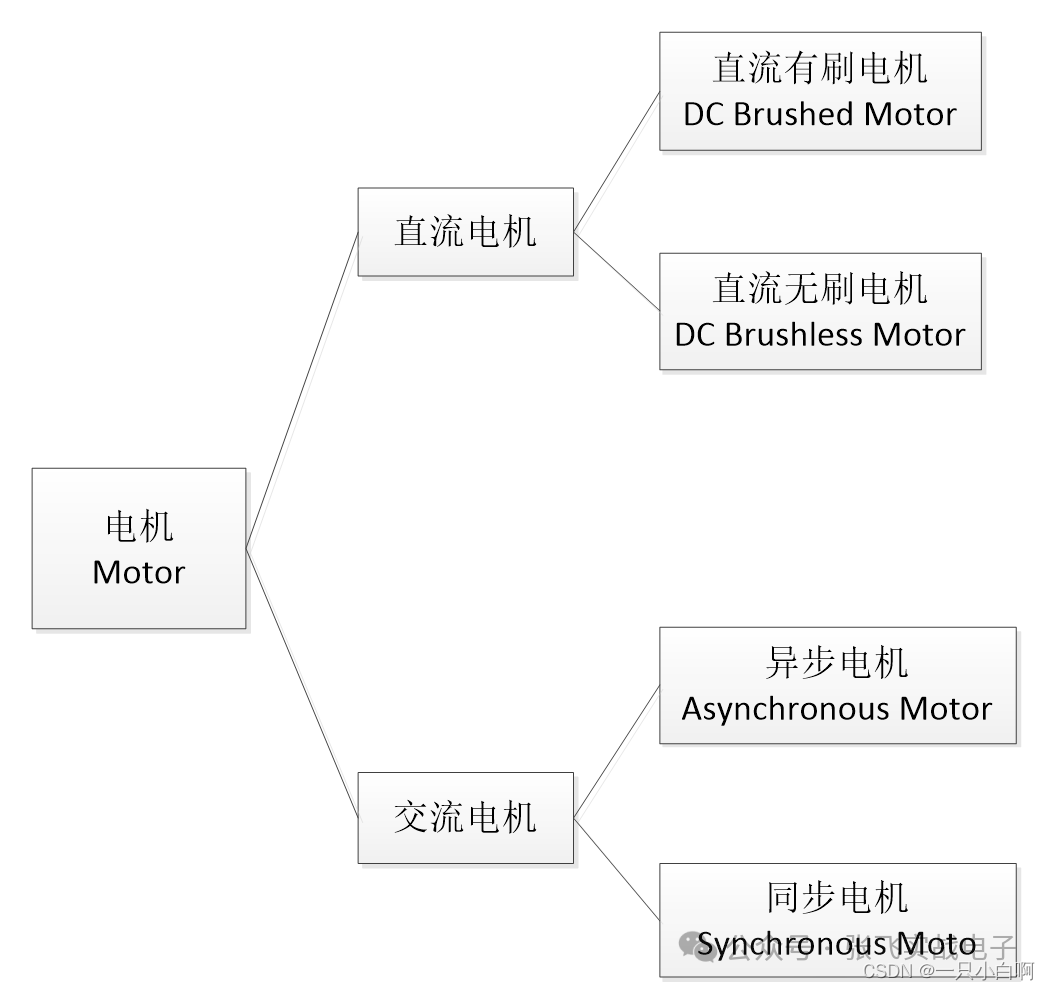
一般的移動或小型的應用場景因為電源是電池類型為低壓直流,所以較為常見的為直流電機。
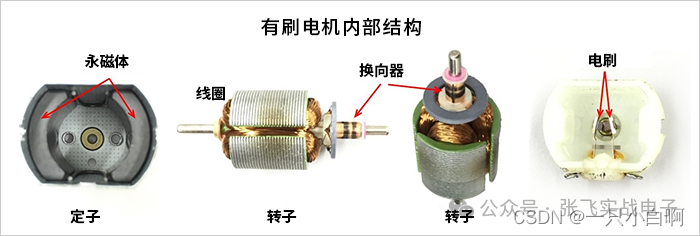
3.1 有刷電機
有刷電機,也就是四驅車馬達電機那種,內部結構如下圖所示。
正常情況下,要讓電機轉動很簡單,用手撥就可以讓電機轉動,現在都什么時代了,還要自己動手?那有什么能夠代替我的手呢,就是用另外一種力替代我手撥動的這個力就行了,萬有引力行不行呢,不行,雖然說兩個物體相互吸引,但是這個力太小了,而且不能控制大小,所以我需要一種力氣大小可控的力。
磁鐵大家應該都玩過,磁場越強的磁鐵吸到一起后就越難分開。根據電磁學第二定律,通電電流約大,磁場越強,那么磁力也就越大,那這力氣不就來了嘛。
有了力氣,那么我就用上去唄,我們定義上面能轉動的磁鐵叫做轉子,下面固定不動的磁鐵叫做定子,用了之后發現,也只能動一下,要讓它連續轉動,好像還要合計合計。如果當要達到穩定狀態時,改變定子的磁極,這時候會產生一個排斥力,讓它繼續轉動,只要我在合適的時間變換定子的磁極,那轉子不就一直在轉動。
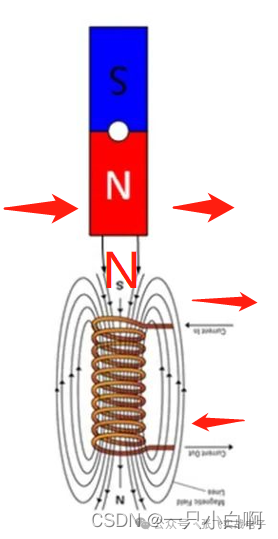
用手動變化定子磁極的話太累了,根據初中物理的安培定則即右手螺旋定則,線圈+電流=磁鐵,而且方向可控,同時磁力大小與電流成正比。PS:電磁學三大定律:法拉第電磁感應定律、安培環路定理、麥克斯韋-安培定律,描述了電場和磁場之間的相互作用關系。
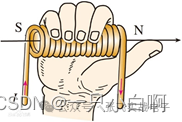
于是乎有了下面的狀態,
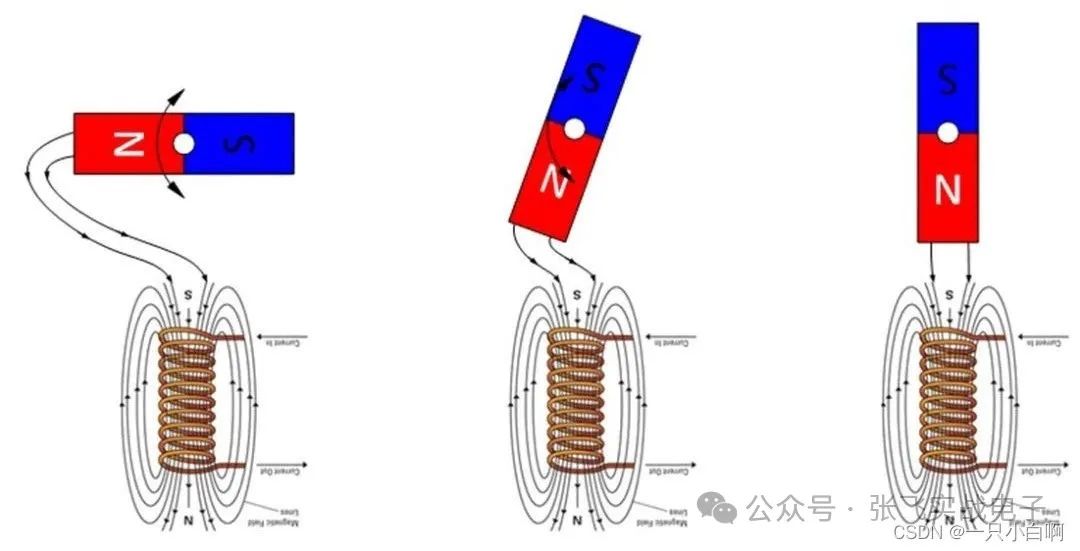
當要達到穩定狀態時,改變一下電流方向,線圈磁極也跟著改變后,就會產生一個繼續波動的力,如下圖。
有刷電機,刷子和換向器的作用,就是更換電流方向。一個線圈、一個磁極、一個刷子+換向器就能實現轉動了,一臺電機原型機就出來了。
為什么拆過的那些電機有好幾個磁鐵和線圈呢?不是一個就夠了么,搞那么多不是浪費。你聽我解釋,我有借口,不是,我有理由這么做,多線圈和磁極的設計有以下目的和優勢:1、增強轉矩,可以提供更多的磁場與線圈的相互作用,進一步增強轉矩。2、平滑轉動,通過交替激活不同的線圈,可以使電機的輸出轉矩更加連續和均勻,減少震動和振動。3、改善運行特性和控制性能等。
不過話說回來,咱還沒搞懂原型機怎么轉動呢,你就跟我扯什么性能,我這不是話說開了就收不住,書接上回,以有刷電機的原型機為例分析原型機怎么轉動的,直接花大價錢拿一個奧迪雙鉆夢之隊經典四驅車馬達來分解說明。
四驅馬達車實物內部圖如下所示。
根據線圈與電刷的接觸程度可以分為以下四個過程,電機轉動就在這四個過程之前依次不斷循環。這里驅動電源始終是直流不用變化,變化的是線圈的接觸改變線圈里面流過的電流,從而完成磁場的轉換。
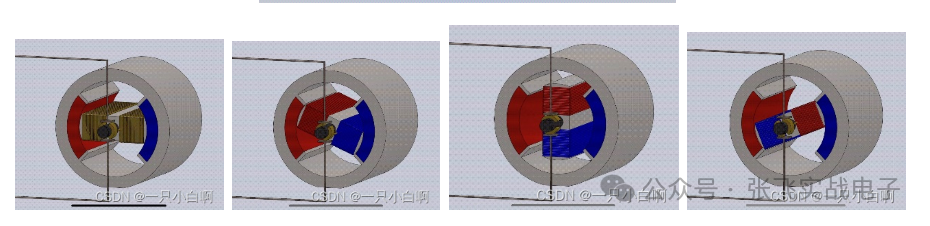
至此有刷電機的轉動分析完成,而實際有三個線圈是為了規避圖1的狀態,避免卡死到中間不轉的情況。其他電機也是從這個基礎上延伸出來,俗話說的好,萬丈高樓平地起,基礎了解完了就可以開始深一步的學習。
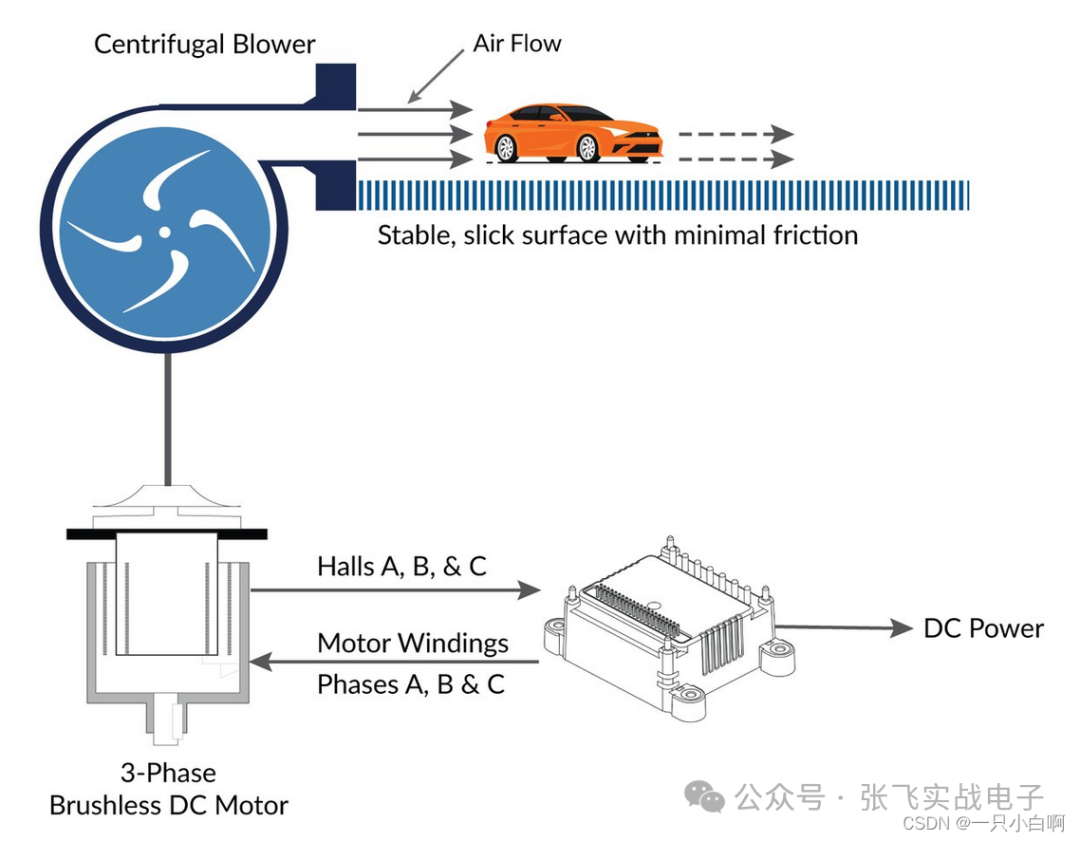
3.2 無刷電機
無刷電機,常見四旋翼無人機電機,內部結構如下圖所示。

無刷電機,顧名思義相比較上面的有刷電機,無刷就是沒有刷子,那沒有刷子的話,如何完成換向,同時這么做的優點是什么,對吧,沒有好處你跟我整這么一出,那別人肯定不買賬,那么聽我慢慢道來。還有就是為啥是三相的?
了解一下三相電機的優點,主要原因:三相電源不是同時交替,而是同一時刻每相相差120°相位,這就意味著在任意時刻,三相提供的電壓總和相同,相當于一個恒定的電源,這是單向系統不具備的。
其他優點:
增加帶負載能力,同等條件下,三相能運輸的功率是單向的三倍,因為有三根線。
三相電機還具有更高的功率因數,這意味著它們在給定負載和效率下消耗更少的能量。
相比較單向的脈沖,三相提供恒定功率,使電機運行更加穩定。
等等,但是也有缺點,相比較單向電機應用起來復雜等。
反正就是優勝劣汰的結果,導致這玩意就是三相結構,而你就是要了解學習它。
好了既然定下了電機構造,然后來分析一下,由上面有刷電機的了解,線圈內的電流是需要換向才能讓電機轉起來的。
單向有刷電機,通電就轉,因為內部有電刷和換向器完成線圈電流的換向,三相無刷電機沒有電刷,外部驅動用MOS管開關,完成線圈內電流的換向。
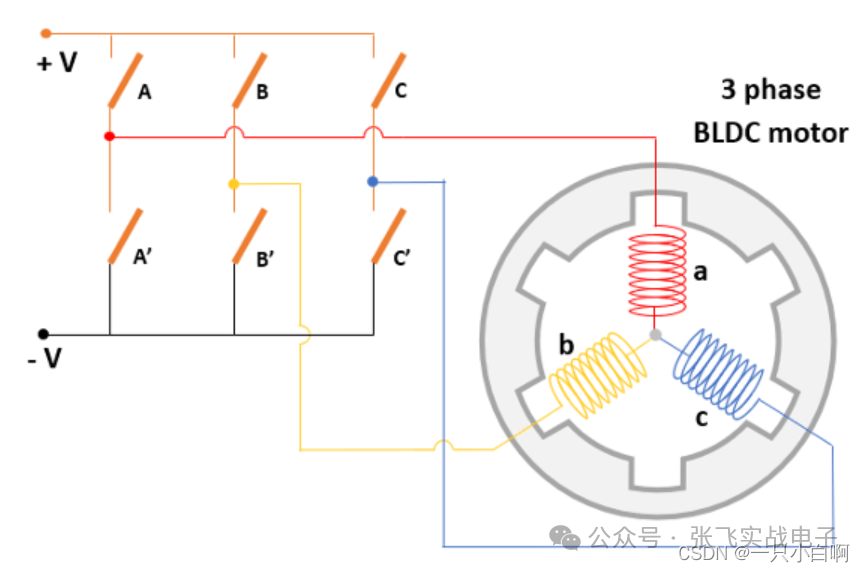
按照有刷電機的邏輯去驅動三相電機,按一定順序依次將每一個線圈通電,這個過程稱為六步換向法。三相電機線圈的控制一共有8種狀態,去掉全開(111)和全關(000)兩種運行過程中沒用的狀態,剩6種,把它分布到電機上去,如圖所示。
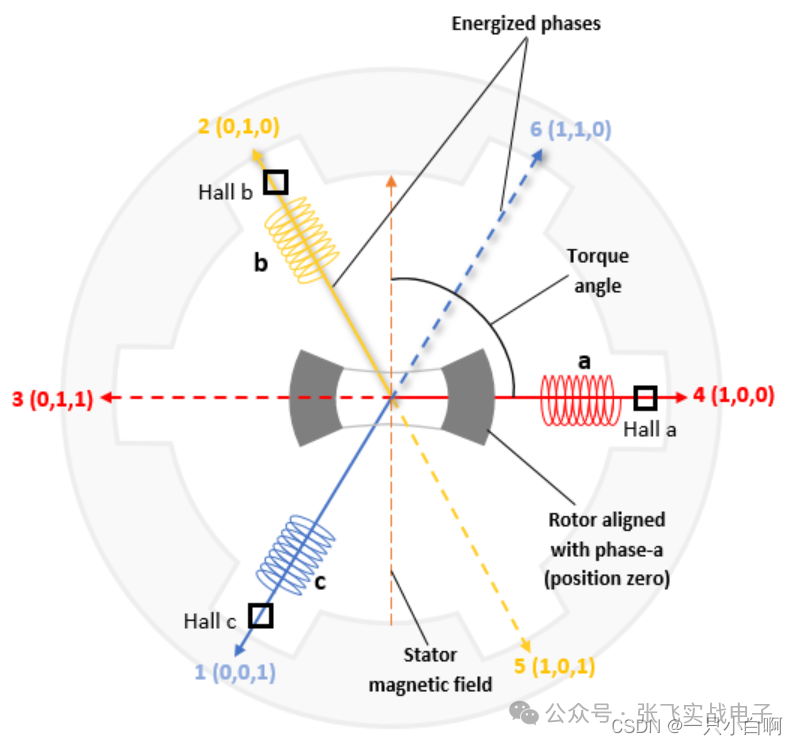
按照順序驅動電機就可以控制正反轉了,如下圖,霍爾傳感器數據代表線圈狀態,下表是力矩情況。
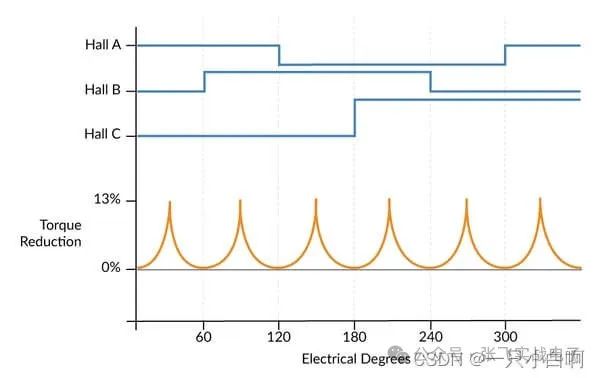
可以看出轉矩一點都不平滑,有大有小,為了使電機轉動更快,能源轉換效率更高,就不能使用這種驅動方式。
那可能就會有人問了,有沒有一種方式,可以控制磁場的大小,每時每刻都讓轉動方向的磁力維持最大,那么這樣的情況下,能量的轉換效率也越高,電機的轉速就越快,是不是很妙啊。
不知道怎么做之前,先取個名字吧,不如就叫做磁場方向控制Field Orientation Control,簡稱FOC。
四、FOC學習
需要控制磁場力,首先要分析磁場力,然后根據想要達到的狀態去控制磁場最后達到目標狀態。可以分解為下面三個步驟:
分析磁力:目的在于要知道如何去控制它
采集數據和計算誤差:采集到實際的數據并與設定的數據與實際數據誤差
調節輸出:將誤差反饋控制輸出。
4.1分析磁力:
那么如何優化這個控制呢,那么從數學和物理學的角度出發分析出解決方案,設某一時刻,磁鐵和線圈的磁場如下所示。
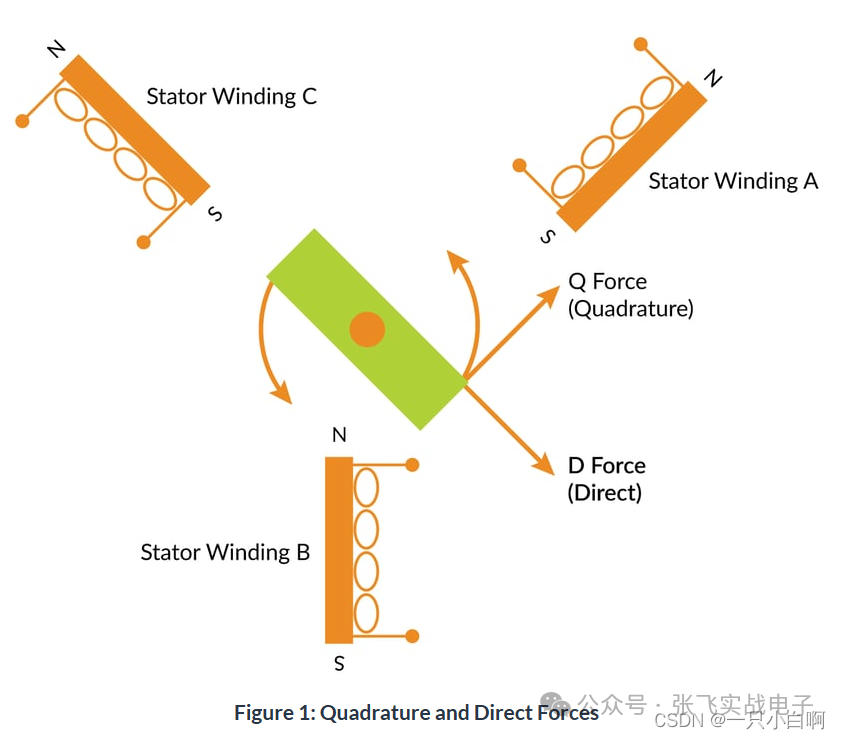
以轉子磁鐵一邊為原點,建立直角坐標系,這個坐標系隨磁鐵旋轉,所以稱為旋轉坐標系,平行于磁鐵的稱為磁軸,垂直于磁鐵的稱為旋轉軸。
將磁鐵所受到的力分解到這兩個坐標軸上,并命名為Q正交力,D正向力。轉子在運行過程中受到這兩個力的作用,在其中D不做功,沒啥作用,所以要把這個力控到0,另一個力Q旋轉軸上的力,用于旋轉,如想要獲得最大轉速,那么就使轉子受到的Q正交力始終保持最大,D為0,這種情況下,效率最高,轉速最快。同樣的道理,如果Q為0,D最大,那么電機就處于扭矩最大的靜止狀態。
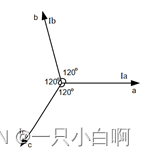
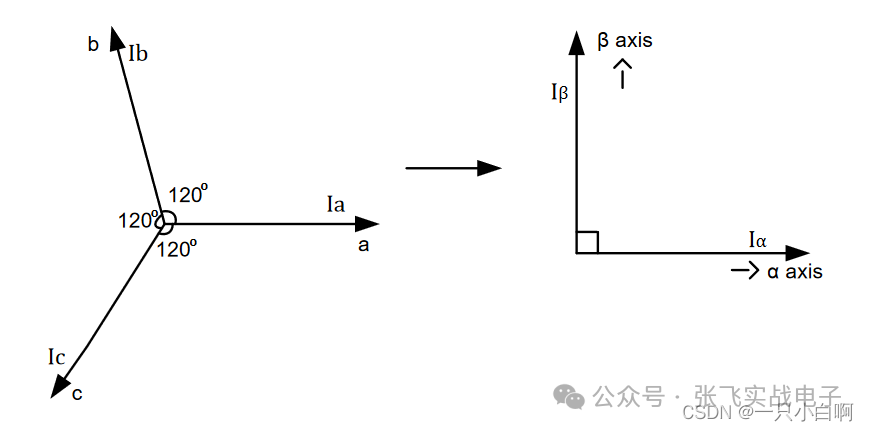
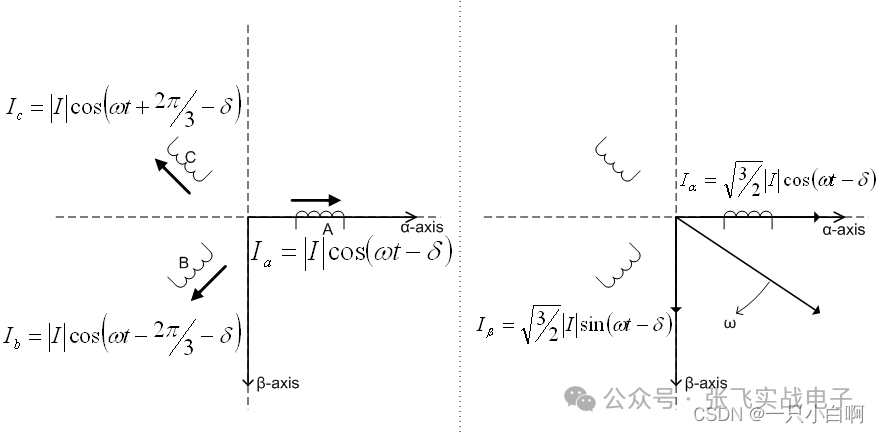
接下來將三個線圈的力作用分析到磁鐵上去,首先對線圈磁場進行分析,因為磁力的大小是不知道的,但是根據電磁學,力的大小與流過線圈的電流大小成正比,所以將電流大小等效為力的大小。又因為定子線圈相對位置固定即相互夾角為120°,電流(磁力)矢量圖如下所示。
如何將這個力分析到磁鐵上去呢?
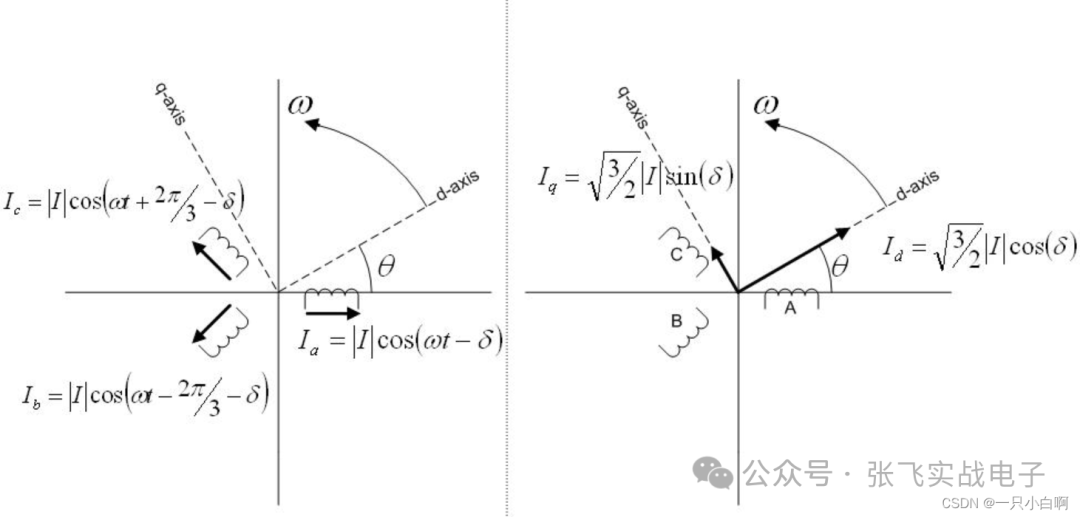
下面的目的就是解答一道數學題,問題:在已知兩個坐標軸:線圈磁場力坐標系和磁鐵旋轉坐標系,線圈磁場力坐標軸有三個磁力向量大小為Ia、Ib、Ic,互相間隔120°,兩個坐標系的夾角為θ范圍在0-360°,將線圈磁場力坐標系上的三個磁力向量分解導磁鐵旋轉坐標軸上,并求出其大小。
解:整個過程大致是將一個坐標系上的三個向量(三相磁力)變換到另一個夾角為θ的坐標系上的兩個坐標軸上,這個過程用數學上稱之為解耦。
答:根據參考答案可知,
步驟1:先將三個向量變成兩個向量,
步驟2:根據θ,將兩個向量分解到磁鐵旋轉坐標軸上。
最終我們將三個線圈產生的磁力轉換為轉子磁鐵受到的Q正交力和D正向力。
人們喜歡將步驟1叫做clarke變換,步驟二叫做park變換。其實這兩個變換的本質還是向量的正交分解和加減運算。
clarke變換:
由:
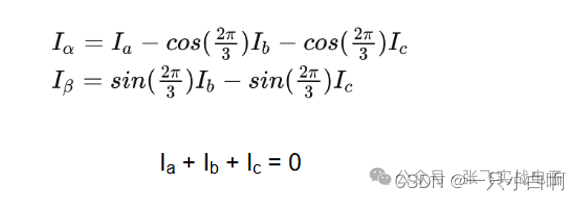
可得:

Park變換:
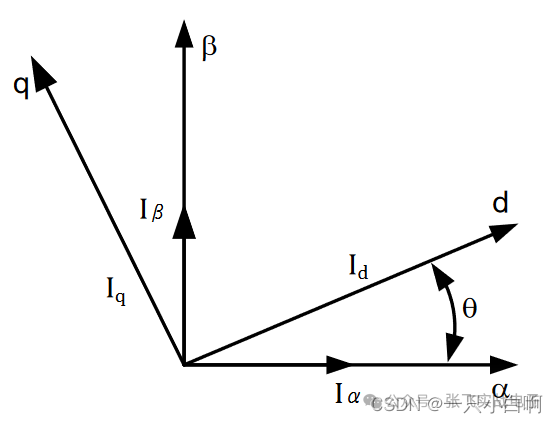
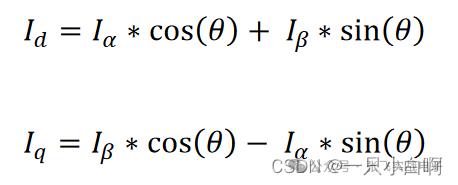
這里,因為線圈坐標系是固定的,磁鐵坐標系是旋轉的,磁鐵坐標系與與線圈坐標系為θ,這個角度是怎么知道的呢?因為轉子會裝上一個位置傳感器,即編碼器、霍爾傳感器等,用來感知轉子的位置,所以這個角度是已知的。
綜上,知道兩個線圈的電流大小和轉子位置后,就知道當前轉子的受力情況,為啥不是三個線圈?因為三相線圈接法使三相電流總和為0。
4.2 采集數據和計算誤差:
由上述我需要采集的數據:
當前線圈電流值:通過電流三個線圈的電流值,可以得到三個線圈產生的磁力。
轉子位置狀態:速度、當前角度值等,通過角度,將磁力分解到轉子上,形成旋轉軸的Q正交力和磁軸的D正向力。這個角度可以通過編碼器或者霍爾傳感器獲得。速度用于后續的控制。
我需要確定的控制狀態:
根據設定的控制狀態轉換為Q、D參數。
例如,在一定轉速的情況下,盡量減小無用的D,使Q保持為定值而不是像六步換向法那樣力矩有大有小,這種情況下能量轉換效率最高。
其他控制:位置閉環、力矩閉環等。
4.3 控制:
以轉速一定為例,實際速度可以通過實時采集位置數據/時間得到。再根據設定的速度與實際速度的誤差去改變力矩大小,這個過程稱為反饋調節,工業上常用PID算法調節誤差,注:這個誤差值的大小取值可能是0-最大速度的任意值。
通過誤差值,按照PID算法系數,可計算出下一個控制狀態的Q、D值,然后將這個Q、D施加到線圈上去改變電機運行狀態,當誤差為0時就達到了設定的目標狀態,下面內容就是講這方面的。
那么問題來了,已知Q、D,如何將這兩個參數轉換為磁場力?答案是通過控制線圈,進而控制轉子磁場,最后達到控制效果。
有兩個問題需要解決,1、如何控制線圈電流,從而達到控制磁場的目的。2、Q、D值如何轉換為線圈電流的控制量。
首先第1點:
由電磁學可知,線圈的磁場大小與流過線圈的電流成正比,而線圈電阻一定,所以施加在線圈兩端的電壓大小也與線圈磁場成正比。于是乎,我改變線圈電壓不就等于改變線圈電流,不就等于改變磁場,不就等于改變對轉子的磁力了么。
那么問題來了,最終控制量Q、D大小任意、可正可負,目前線圈電壓就兩種,那么為0要么為1,這大小怎么改變呢?別急,有一種東西叫做脈寬調制,PWM(Pulse Width Modulation)。
大概意思是一個幅值為1V的方波,通過調節占空比可以將方波等效為0-1V之間的任意電壓,如下圖所示。
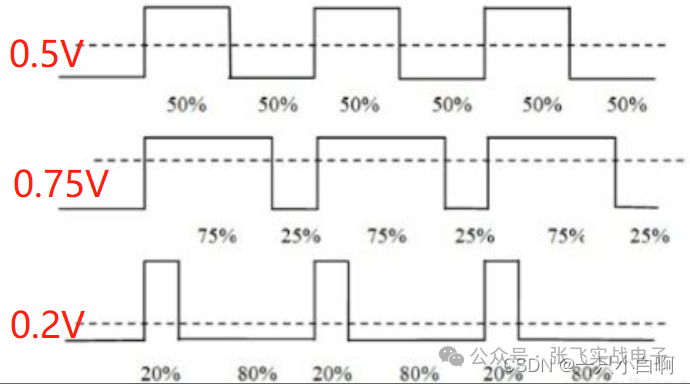
將目標控制量用PWM調制出來就可以實現控制了。
所以第1個問題答案:通過PWM控制線圈電壓就可以達到控制線圈磁場的目的。
然后第二點:
這就相當于線圈磁力轉換為轉子受力的逆變換,將旋轉坐標系下的兩個向量轉換為固定坐標系下的三個線圈電壓向量,再通過第一點實現控制。
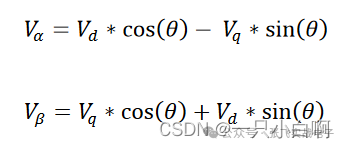
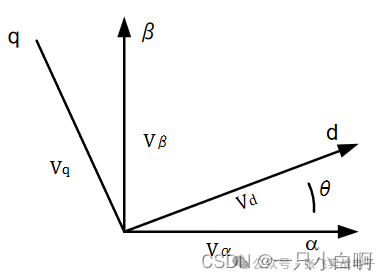
1、將旋轉坐標系兩個向量轉換固定坐標系下的兩個向量,這個過程需要用到park逆變換,如下圖。
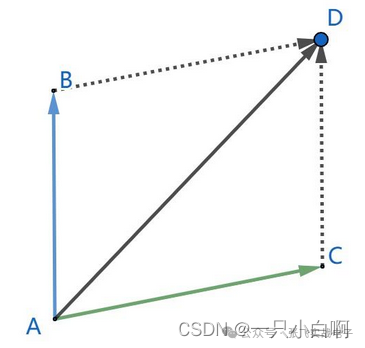
由向量的運算,可將轉換后的固定向量轉換為一個向量,那么這個向量就是以A為原點,隨著轉子360°旋轉,如下圖。
2、如何由固定的三個線圈電壓向量合成上述轉換后的一個向量,就是后面所說的。
我們已知三個線圈向量,有六種狀態即6個向量,如下圖。
那么將三個向量合成一個大小固定繞原點旋轉360°的向量,大概意思如下圖,改變三個向量的大小即可。
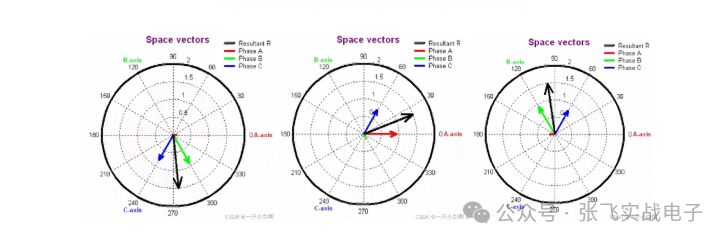
轉換輸出的這個過程稱為PWM調制,又因為是調制結果是合成空間矢量,所以也稱為空間矢量脈寬調制(Space Vector Pulse Width Modulation)。
總結:
整個過程的流量框圖可以描述為下圖所示:

經過上述過程就已經達到了Q、D到磁場轉換的目的了,后續就是完善控制邏輯和程序算法細節。
優點
FOC:磁場控制,可以精確控制電機內部線圈的磁場強度,從而達到想要的控制效果,相比較一般控制類型,這種控制效率、精度更高,性能更強、功能更多。
效率對比:
YouTube上有個實驗,在同樣的條件下,用FOC控制和六步換向法控制無刷電機風機吹動小車,測量小車移動的距離來判斷風機的效率。
同樣的條件下,FOC吹動玩具車的距離是六步換向法的6倍,六步換向法驅動風機轉速為17895rpm,而FOC驅動的風機轉速達到了29310rpm,快了64%。
附錄一
clark變換:一種簡化三相電路分析的數學變換α-β變換,由Edith Clarke于1937-1938發表了關于不平衡三相問題的修改計算方法的論文中提及。
park變換:是目前分析同步電動機運行最常用的一種坐標變換,由美國工程師派克(R.H.Park)在1929年提出。派克變換將定子的a,b,c三相電流投影到隨著轉子旋轉的直軸(d軸),交軸(q軸)與垂直于dq平面的零軸(0軸)上去,從而實現了對定子電感矩陣的對角化,對同步電動機的運行分析起到了簡化作用。
上一篇:FOC控制算法詳解
下一篇:一文讀懂:恩智浦新一代可配置模擬前端,如何重塑工業自動化?
- 熱門資源推薦
- 熱門放大器推薦
 機器人學課件PPT
機器人學課件PPT 5962-01-244-3894
5962-01-244-3894

- EVAL-SSM3582Z,用于評估 SSM3582/SSM3582A 2x、31.76 W、數字輸入、無濾波器立體聲 D 類音頻放大器的評估套件
- Euclid Klicky Probe pcb
- HV9911DB3,具有出色電流調節功能的高亮度降壓 LED 驅動器演示板
- 熱插拔解決方案符合 AMC 和 MicroTCA 標準
- 用于寬輸入電壓范圍(7.5V-30V 至 5V)的開關預穩壓器
- LTC2862ACDD-1 故障安全 0 應用的典型應用(空閑狀態 = 邏輯 0)
- DC711A-B,使用 LT3468ES5-1 閃光燈電容器充電器高壓電源的演示板,Vin = 2.5V-8V,Vout = 320V,ISW - PK = 0.7A
- 繼電器模塊
- RSL10-SIP-001GEVB:RSL10 SIP 開發板
- REF196 精密微功率、低壓差電壓基準的典型應用













 京公網安備 11010802033920號
京公網安備 11010802033920號