伺服系統是指以位置、速度、轉矩為控制量,能夠動態跟蹤目標變化從而實現自動化控制的系統,主要包括伺服驅動器、伺服電機和編碼器,是實現工業自動化精密制造和柔性制造的核心技術。
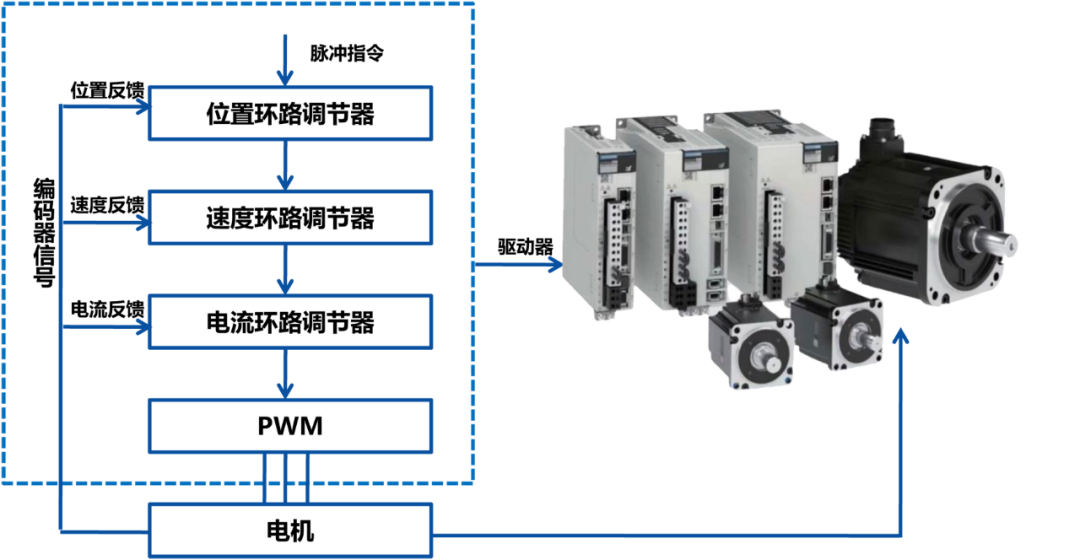
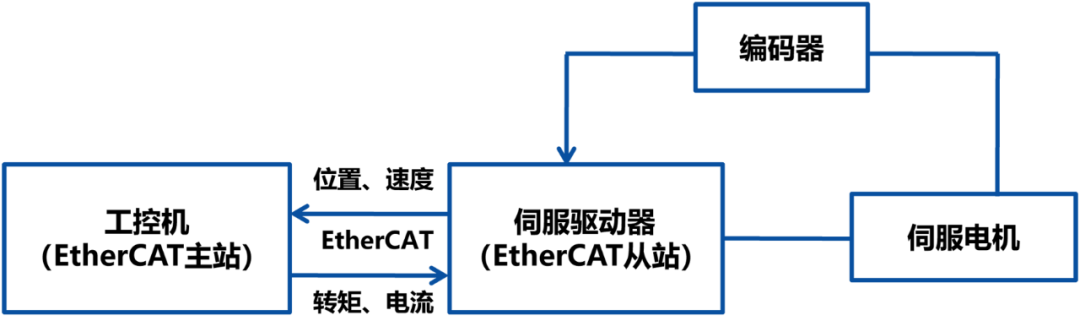
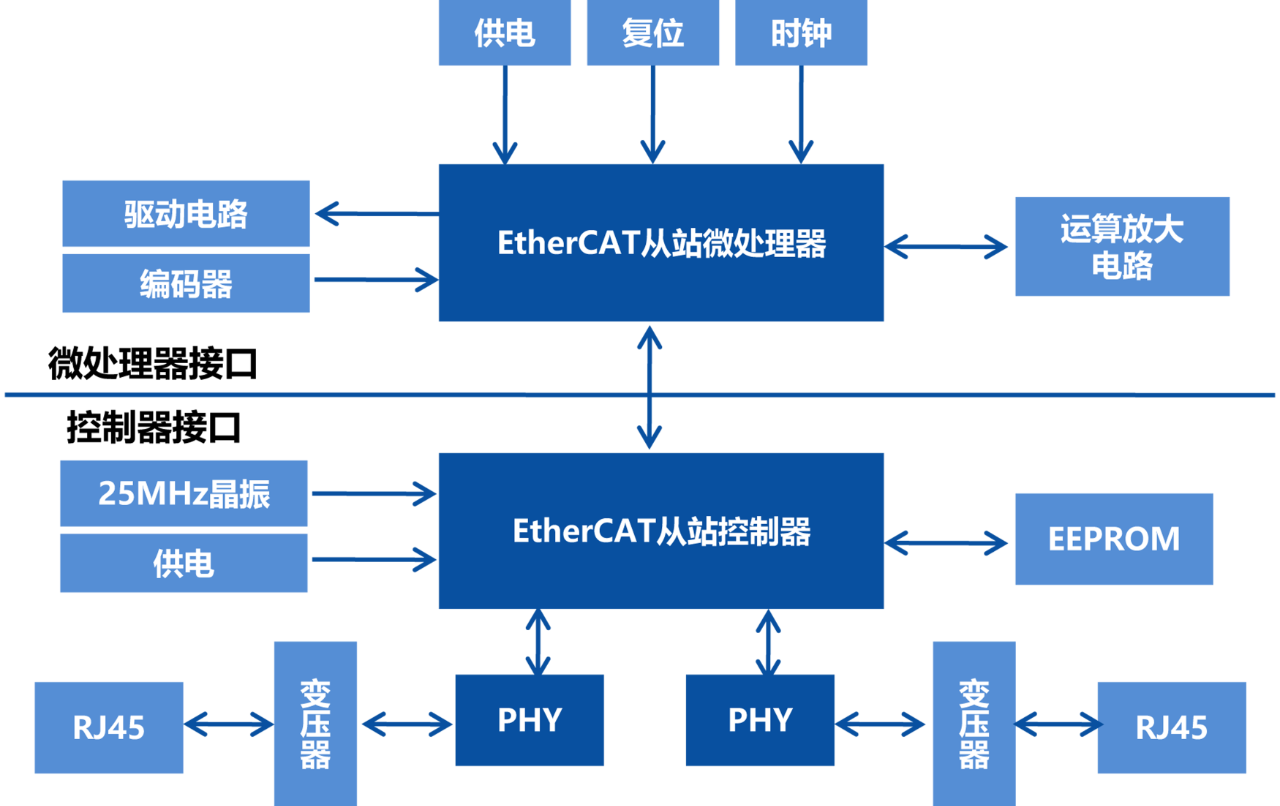
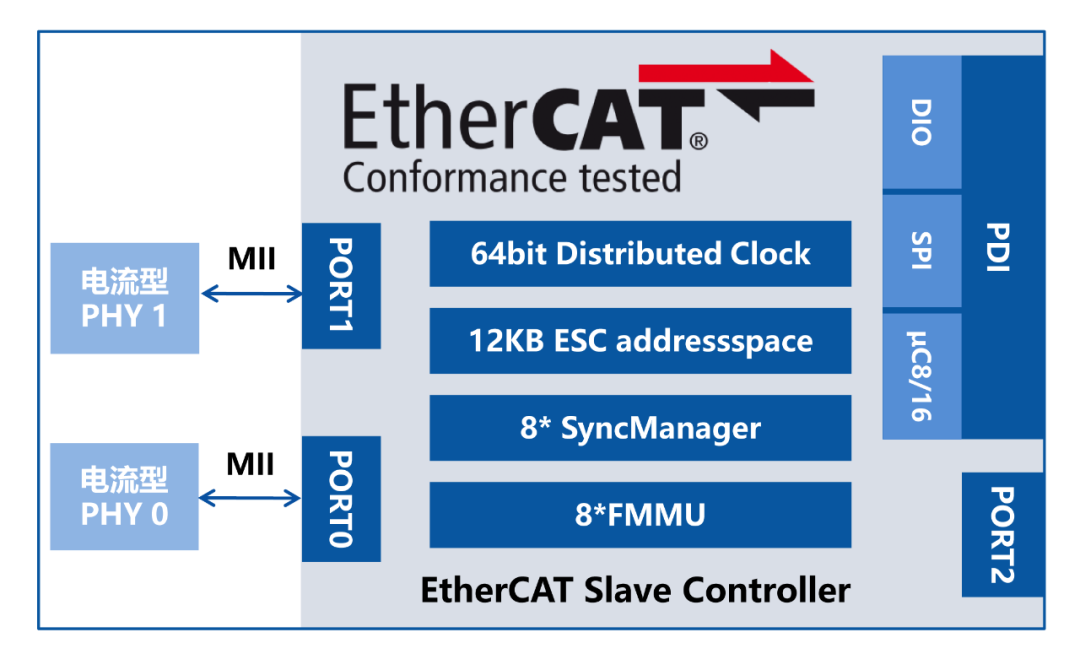
▲典型伺服系統組成結構圖 01 伺服電機驅動器:運動控制系統的“心臟” 伺服驅動器作為運動控制系統的驅動層和“心臟”,一般通過位置、速度和力矩三種方式對伺服電機進行控制,實現高精度的傳動系統定位。 驅動器接收控制信號并將其轉化為能夠運行電機的電流、電壓信號,進而驅動電機(執行層)運轉,帶動工作機械運行,最終實現機械運動高速、高精度的位移(角度)、速度、力矩控制。 ▲典型伺服驅動器工作機制圖 目前伺服驅動系統已廣泛應用于工業自動化生產中,比如機械手、CNC 數控機床、工業機器人等領域,已經成為工業自動化的重要支撐技術之一。根據格物致勝數據,2023年我國工業自動化市場規模約為2601億元。其中伺服系統市場規模超過203億元,到2026年將達到216億元。 ▲ 2020-2026E中國伺服系統市場規模及發展趨勢(數據來源:格物致勝) 02 基于EtherCAT的伺服驅動系統 隨著工業4.0和中國制造2025概念的陸續提出,工業自動化領域的伺服驅動系統趨于網絡化和智能化,大多數伺服驅動系統都采用了總線通信方式,實現復雜的運動控制功能。 傳統的伺服驅動系統由于缺乏網絡通信功能、開放性不強、擴展性差、系統兼容性差等條件的限制,已很難滿足現代制造業的發展需求。近年來,隨著工業以太網EtherCAT技術快速發展,EtherCAT技術被廣泛應用于各種復雜的控制系統中,構成網絡化實時運動控制系統結構,并具備良好的網絡結構和人機交互功能,已成為伺服驅動領域發展的主流。 基于 EtherCAT伺服運動控制使得網絡伺服運動控制系統實時性更高(100個伺服軸的通訊僅需100us 就可為所有軸所需的參數,同時還能報告其狀態參數),拓撲結構更加靈活,可擴展性更好,安全性更高;同時有利于企業生產系統網絡與管理系統網絡的結合,提高現代制造的管理水平,改造升級現代制造業;通過充分使用豐富的PC硬/軟件資源和低成本且可共享的網絡資源,有助于降低網絡運動控制系統成本。EtherCAT技術具有帶寬利用率高、兼容性好、可靠性高、抗干擾性強、拓撲靈活等優勢特點,使其在工控界迅速普及,各家廠商紛紛推出了基于EtherCAT技術的伺服產品。 EtherCAT技術在伺服驅動控制領域的應用優勢包括: 1)節點與節點之間只要網線連接,系統電氣柜配線非常方便; 2)系統抗干擾能力強,網口是隔離的,整個弱電控制板的EMC特性好; 3)EtherCAT 初始化完成就可以直接讀取所有從站軸的編碼器位置; 4)SDO可以在線讀取與修改各軸的參數與增益,軸參數調試更方便; 5)可以選擇不同的 PDO數據內容,實現位置轉矩速度控制,CSP(周期位置)ICSV(周期速度)/CST(周期轉矩)可以自由切換; 6)方便上位機遠程診斷和維護電氣系統,預測性維護也更方便。 基于EtherCAT實時通信的伺服電機驅動控制系統主要由以下幾部分組成:工控機、伺服驅動器、EtherCAT總線、編碼器、伺服電機。 ▲典型EtherCAT伺服驅動系統結構圖 1)工控機配置為基于PC機的EtherCAT 主站,周期性接受從站上傳位置、速度等參數,并做相應的閉環運算,然后下發參考電流或轉矩給從站; 2)伺服驅動器作為EtherCAT從站,接受編碼器所采集的電機參數,然后與主站進行數據交互,將相應數據由EtherCAT總線周期性傳給主站,并接受主站下發數據和控制命令,并驅動伺服電機; 3)EtherCAT總線將工控機與伺服驅動器連接起來,作為主從站數據通信通道,使用100BASE-TX的5類雙絞網線等為其傳輸介質; 4)編碼器周期快速采集電機位置、速度參數,并反饋給伺服驅動器,以便主站讀取; 5)伺服電機采用矢量控制等方式,由其伺服驅動器實現控制,以帶動相應軸系運轉。 整個EtherCAT伺服電機驅動控制系統的重點在于EtherCAT主從站的實現:主站采用基于PC的方式實施,由工控機配置實現相應功能;從站直接采用EtherCAT伺服驅動器,已包含從站處理硬件,可通過相關配置實現從站通信和電機驅動功能。 基于EtherCAT的多軸伺服驅動器從站硬件構架的主要組成部分包括網絡通信接口、EEPROM 存儲電路、EtherCAT從站控制器、主控微處理器及外圍電路等。 ▲典型EtherCAT伺服驅動器結構圖 EtherCAT從站控制器用于實現EtherCAT協議的實現以及數據幀的處理工作,是整個從站實現EtherCAT通信的核心。EtherCAT伺服從站控制器有3個主要接口,通過 RJ45 與主站或者是其他從站相連,構成不同的拓撲結構,也是通過網線進行數據傳輸的硬件接口;通過EEPROM存儲從站設備文件信息,主站從中讀取從站信息,識別并設置從站;通過 PDI(物理數據接口)與微處理器進行數據交換。 03 碼靈半導體EtherCAT伺服驅動器解決方案 碼靈半導體CF1106系列芯片在EtherCAT伺服驅動器中的應用優勢: CF1106系列芯片包含8個FMMU(現場總線內存管理單元) 負責實現從邏輯地址到物理地址的映射,8個SyncManager(同步管理器) 可以由用戶配置方向,負責 EtherCAT 工作模式的選擇和相關通信數據的訪問管理,8KB的雙端口存儲器 (DPRAM)用于存放數據;支持三種PDI(過程數據接口)接口:支持32位 Digital I/O、SPI 從站接口、8/16位異步微控制器接口(μC8/16),作為從站控制器和應用之間的數據接口;其中SPI與μC8/16方式用于連接外部微處理器,組成復雜EtherCAT從站;支持64 位分布式時鐘,分布時鐘引腳與MCU的中斷引腳連接,實現多個伺服從站控制任務與輸入采樣的同步;通過I2C接口連接EEPROM存儲器,存儲從站設備描述信息。CF1106系列芯片內部集成2個10M/100Mbps以太網PHY,兼容IEEE 802.3u 100Base-TX、100Base-FX(僅電壓型PHY支持光纖),支持Auto-Negotiation自動協商、Auto-MDIX自動交叉識別,可使用直連或交叉線纜。對于工業應用而言,CF1106系列內部集成了兩個以太網PHY芯片,有利于系統高度集成,在電路設計過程中,更簡潔布線更容易。 ▲ 碼靈半導體CF1106系列芯片結構框圖 ▲ 碼靈半導體CF1106系列芯片實物圖 此外,與其它EtherCAT從站控制芯片相比,CF1106系列價格更低,在后期產品成本控制上,具有更大優勢,可以提高產品市場競爭力。 隨著工業自動化的迅猛發展,EtherCAT伺服驅動器作為機電一體技術的關鍵組成部分,將標準以太網的優點和工業自動化的實時性進行有機結合,兼具高效確定性的通信協議和更強大的數據處理能力適用于對動態性和精確性要求極高的伺服驅動控制系統,降低了自動化設備成本,提高了實時響應速度,順應了工業自動化發展趨勢。碼靈半導體提供富有競爭力的EtherCAT芯片助力伺服驅動控制系統向開放性、柔性、互聯性、高速穩定性、可靠性、可重構性的方向發展。


上一篇:淺談PWM控制電機
下一篇:盤式電機的工作原理和特點
推薦閱讀最新更新時間:2025-07-04 06:14

 施耐德-Lexium15-調試軟件Unilink
施耐德-Lexium15-調試軟件Unilink 安川伺服驅動器圖紙
安川伺服驅動器圖紙 安川7系伺服功率板圖紙
安川7系伺服功率板圖紙 射頻電路設計
射頻電路設計
- 適用于汽車應用的 LT3973HMSE-3.3 3.3V 降壓轉換器的典型應用
- R_08_V30基于IPS2電機換向傳感器的設計
- 使用 Microchip Technology 的 PIC16C782 的參考設計
- 使用 LT1054CSW 基本型電壓逆變器 / 穩壓器的典型應用
- 使用 LTC3637EDHC 4V 至 76V 輸入至 1.8V 超級電容器充電器的典型應用
- 儀表用 ADC 驅動器
- EN6310QA 1A PowerSoC 電壓模式同步 PWM 降壓與集成電感器的典型應用
- STEVAL-ISV012V1,使用 L6924D 高達 5 W 太陽能電池充電器的演示板,用于單節鋰離子和鋰聚合物電池
- 適用于汽車應用的 A5974D 正降壓-升壓穩壓器的典型應用電路
- 使用 NXP Semiconductors 的 TDA2582Q 的參考設計













 京公網安備 11010802033920號
京公網安備 11010802033920號