本文著重介紹了在液壓伺服控制系統中,若結合計算機軟件進行仿真,對系統的參數可進行較精確地調整,并對可靠性做進一步驗證,最終可以得出比較可靠的液壓伺服控制系統。
隨著科學技術的不斷進步,計算機技術科學逐漸成熟,其強大而豐富的功能已被人們所認知。現今,計算機建模與仿真技術已進入人類社會的各個領域并發揮著不可估量的作用。計算機建模與仿真是將1個系統以可接收的形式描述給1個計算機系統,其關鍵是對系統狀態的描述。如果系統可用1組變量來概括,那么變量值的計算就可仿真系統從1個狀態到另1個狀態的變化。
半個多世紀來,系統建模與仿真技術在各種應用需求的牽引及有關學科技術的推動下,已經發展形成了綜合性的專業技術體系,并迅速地發展為1項通用性、戰略性技術。它與高性能計算(High Performance Computing)一起,正成為繼理論研究和實驗研究之后第3種認識、改造客觀世界的重要手段。目前,系統建模與仿真技術已成為航空航天、信息、生物、材料、能源、先進制造等高新技術和工業、農業、商業、教育、軍事、交通、社會、經濟、醫學、娛樂、生活服務等眾多領域廣泛采用的1項技術。
1、 液壓伺服控制系統建模與仿真發展概況
液壓系統仿真技術開始于20世紀50年代,經過幾十年的研究,液壓仿真軟件包的性能已經從原來的精度低、速度慢發展到精度高、速度快;從只能處理單輸入、單輸出的線性系統發展到能處理多輸入、多輸出的非線性系統;從復雜的編程輸入發展到友好的交互式圖形界面輸入。目前在液壓系統仿真領域內,主要涌現出像Hop-San、ADAMS/Hydrau-lics、Matlab/simulink及AMESim等仿真軟件。
國內的液壓仿真技術開始于20世紀70年代末80年代初。近年來在國內廣泛應用的液壓仿真軟件多屬于國外的產品,其中包括專門用于液壓仿真的軟件和用于機械或機電系統的液壓仿真功能的軟件。總的說來這些產品在圖形化建模、模型庫內容的豐富性、界面友好和操作方便等方面都取得了比較大的成功,同時在三維實體運動和動力分析與仿真、查錯功能、建模的具體方法或功能的多樣性方面又各有所長。
幾十年來,我國非常注重仿真技術的發展與應用。建模與仿真技術在許多領域的系統規劃、分析、設計、實施、維護、管理、人員訓練等方面發揮了重要的作用。
2、 液壓伺服控制系統系統建模與仿真原理
建模與仿真技術具有很高的科學研究價值和巨大的經濟效益,它是以相似原理、系統技術、信息技術以及仿真應用領域的有關技術為基礎,以計算機系統與應用有關的物理效應設備及仿真器為工具,利用模型對系統進行研究的一門多學科的綜合性的技術。由于建模與仿真技術的特殊功效,特別是安全性和經濟性,使得建模與仿真技術得到廣泛的應用。建模與仿真包括3個基本要素:系統、模型和計算機,聯系著它們的3項基本活動是模型的建立、仿真模型建立和仿真實驗。其關系圖如圖1所示。

圖1 仿真3要素及關系圖
根據機械裝備的要求,液壓控制系統可以對位置、速度、力等任意被控對象按一定的精度進行控制。并且在有外部干擾的情況下,也能穩定而準確的工作。通常液壓伺服控制系統由以下單元組成:指令單元、比較單元、控制放大器、電液控制閥、執行元件、負載、檢測單元、能源裝置等。
液壓伺服控制系統其指令單元可以是信號發生器、電位器、計算機或其他電子器件,根據系統動作的要求發出相應的電壓信號。指令裝置發出相應的指令,由D/A轉換器轉換成電壓信號;檢測反饋裝置采用位移傳感器來檢測輸出位置并轉換為電壓信號,該電壓信號作為反饋信號與指令信號加以比較,給出偏差信號,構成閉環控制結構;電液伺服閥為液壓控制元件,執行機構采用閥控缸。液壓伺服控制系統的職能圖和原理圖如圖2和圖3所示。
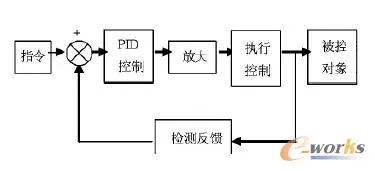
圖2 液壓伺服控制系統的職能圖
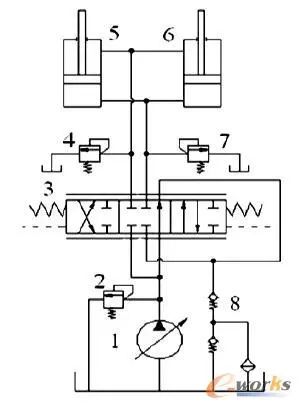
圖3 液壓伺服控制系統基本原理圖
1.液壓主泵 2.溢流閥 3.主控閥 7.限壓閥 6.工作機構液壓缸 8.背壓閥
3、 MATLAB環境下的液壓伺服控制系統的仿真研究
MATLAB是MathWorks公司于1982年推出的1套高性能的數值計算可視化軟件,廣泛應用于自動控制、圖像信號處理與分析、振動理論、時序分析與建模、優化設計等領域,并表現出一般高級語言難以比擬的優勢。
MATLAB提供的動態系統仿真工具箱Simulink,是眾多仿真軟件中功能最強大、最優秀的1種。它可以對動態系統進行建模、仿真和分析,從而在設計系統的時候先對系統進行仿真和分析,然后及時進行必要的修正,以實現高效的系統開發。Simulink支持線性和非線性系統、連續和離散系統以及多進程系統。Simulink包含有Continuous(連續量)、Discrete(離散量)、Functions&Table、Math、Nonlinear、Signals systems、Sinks)、Source、Subsystems等子模型庫。并且在每個子模型庫中包含有相應的功能模塊,用戶也可以制定和創建適合自己需要的模塊。
Simulink工具箱具有有2個明顯的功能:仿真(Simu)與連接(Link),它可以利用鼠標器在模型窗口上“畫”出所需的控制系統模型,然后利用該軟件對系統直接進行仿真。由于MATLAB和Simulink是集成化軟件,用戶可以在這2種環境下交替的對仿真模型進行仿真、分析和修改。同時可以仿真較大、較復雜的、多進程的系統。
3.1 MATLAB環境下系統各環節的數學模型
3.1.1 伺服閥的數學模型伺服閥的傳遞函數為
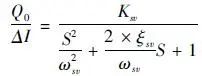
該式中:Q0——伺服閥的流量,m3/s;
ΔI——電流增量,A;
Ksv——伺服閥的流量增益,m3/(s·A);
ωsv——伺服閥的固有頻率,rad/s;
ξsv——伺服閥的阻尼比。
其中伺服閥的流量增益
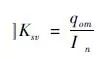
該式中:Ksv——伺服閥的流量增益,m3/(s·A);
qom——伺服閥的空載流量,m3/s;
In——伺服閥的額定電流,A。
3.1.2 液壓閥控缸數學模型液壓閥控缸的傳遞函數為
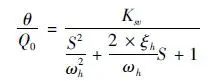
該式中:θ——液壓馬達負載的傳遞函數;
Ks——增益,m3/S·A;
ωh——液壓固有頻率,rad/s;
ξh——阻尼比;
3.1.3 檢測傳感器的數學模型檢測傳感器的數學模型為

該式中:Uf——傳感器電壓,V;
Kfv——傳感器的增益,(V·s)/rad。
3.1.4 放大器的數學模型分放大器的數學模型為

該式中:Ue——放大器的額定電壓,V;Ka——放大器的增益,A/V。
3.2 系統的動態結構圖
根據系統的工作原理框圖和已確定的數學模型,可得出MATLAB環境下系統的模型,如圖4所示。
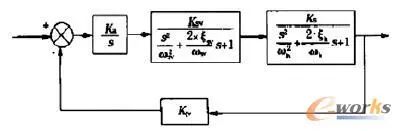
圖4 液壓伺服系統的動態結構圖
4、 結論
通過對液壓伺服控制系統的建模與仿真研究,最終能達到以下目標:
4.1 通過建立數學模型和仿真實驗,確定已有系統參數的調整范圍,從而縮短系統的調試時間,提高效率;
4.2 通過仿真實驗研究各參數對系統動態特性的影響,確定參數的最佳匹配,提供實際設計所需的數據;
4.3 通過仿真實驗驗證設計方案的可行性及結構參數對系統動態性能的影響,從而確定最佳控制方案和最佳結構。
上一篇:通過RS232轉Profinet網關連接PLC與RS232協議設備的步驟
下一篇:變頻器設置只需關注這幾個關鍵參數!
推薦閱讀最新更新時間:2025-06-25 17:29

 AD8338的spice仿真模型
AD8338的spice仿真模型 電磁仿真軟件Mician μWave Wizard Manual Version9.1
電磁仿真軟件Mician μWave Wizard Manual Version9.1 基于ICL8038的正弦波、方波和三角波發生器protues仿真設計(仿真圖、論文)
基于ICL8038的正弦波、方波和三角波發生器protues仿真設計(仿真圖、論文) 電子工程師必備-元器件應用寶典
電子工程師必備-元器件應用寶典
- LTC3814-5、5V、14V 至 24V、100W DC/DC 轉換器
- 使用 Analog Devices 的 LTC1174HVCS8 的參考設計
- MIC94300YMT EV,MIC94300 評估板,采用紋波阻斷技術的 200mA 開關
- LT6656AIDC-3.3、3.3V 低功率 ADC 電壓基準的典型應用
- RTL8822CS模塊硬件參考設計指南
- MIC94345-GYCS 1.8V 輸出電壓、500mA LDO 與紋波阻斷技術的典型應用
- LT8630EFE 12V、0.6A 降壓轉換器的典型應用電路
- LT1172IS8、-10 至 -26/1.25A LCD 對比度電源的典型應用
- 用于 LCD 背光的 6-LED 白光 LED 驅動器
- ADP322 三路、200mA、低噪聲、高 PSRR 穩壓器的典型應用













 京公網安備 11010802033920號
京公網安備 11010802033920號