電機(俗稱“馬達”)是指依據電磁感應定律實現電能轉換或傳遞的一種電磁裝置。它的主要作用是產生驅動轉矩,作為用電器或各種機械的動力源。

在磁場中放置線圈,通過流動的電流,線圈會被一側的磁極排斥,同時被另一側磁極所吸引,在這種作用下不斷旋轉。在旋轉過程中令通向線圈中的電流反向流動,使其持續旋轉。這就是最基本的電機工作原理。
無刷直流電機(BLDC)
控制通向線圈的電流方向和大小來控制轉子的旋轉。
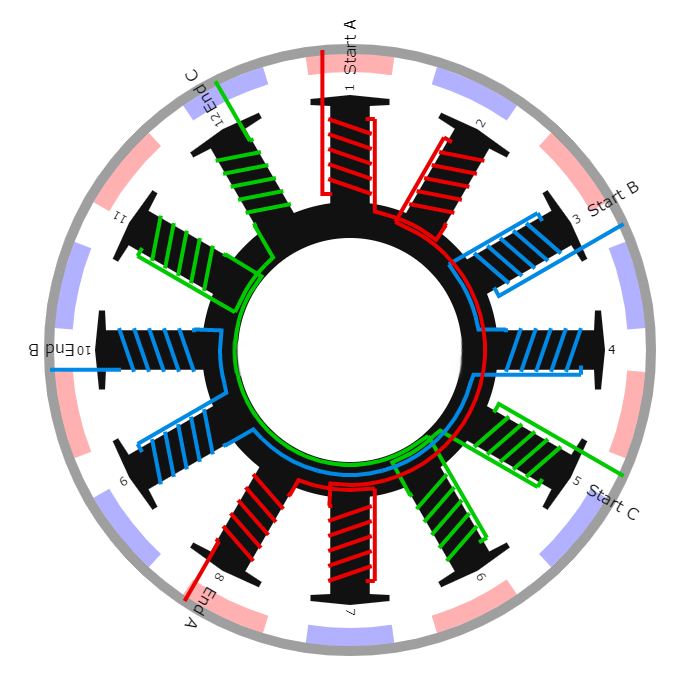
BLDC電機中的“BL”即“Brushless”,譯為無刷。即DC電機中的“電刷”沒有了。電刷在DC電機里扮演的角色是通過換向器向轉子里的線圈通電。那么沒有電刷的BLDC電機是如何向轉子里的線圈通電的呢? BLDC電機采用永磁體來做轉子,轉子里是沒有線圈的。由于轉子里沒有線圈,所以不需要用于通電的換向器和電刷。取而代之的是作為定子的線圈。BLDC電機通過
BLDC電機的優勢和應用
BLDC電機的第一個優點是“高效率”。它可以將回旋力(扭矩)始終保持最大值。DC電機在旋轉過程中最大扭矩只能保持一個瞬間,無法始終保持最大值。若DC電機想要得到和BLDC電機一樣大的扭矩,只能加大它的磁鐵。這就是為什么小型BLDC電機也能發出強大力量的原因。
第二個特點是“良好的控制性”,與第一個有所關聯。BLDC電機可以精確地反饋目標旋轉數、扭矩等。通過精確的控制可以抑制電機的發熱和電力的消耗。若是電池驅動,則能通過周密的控制,延長驅動時間。
上述兩點則是無電刷和換向器所帶來的優勢。除此之外BLDC還有耐用,電氣噪音小等特點。若不希望使用過程中產生噪音,采用BLDC電機即可實現。
矽力杰BLDC電機驅動方案
矽力杰作為全球領先的高性能模擬芯片廠商,在汽車電子,工業控制,通信計算及消費電子等各個領域均有領先的技術和眾多的芯片解決方案。SY67343為矽力杰推出的新一代三相無感正弦電機驅動芯片,采用內置MOS,運行最大驅動電流2A,支持多種電機類型,如永磁同步電機,無刷直流電機等。此外SY67343還支持多種保護功能,如過流保護,欠壓保護和過溫保護等,全面保障電機和芯片在使用過程的安全性。
SY67343
三相直流無刷電機驅動芯片
◆ 電源電壓范圍:5~40V
◆ 內部集成三個半橋電機驅動
◆低功率管導通電阻:
HS+LS<250mΩ
◆ 最大驅動電流2A ,
峰值電流3A
◆ 無傳感器控制
◆ 高效正弦波驅動
◆ 集成5V/3.3V降壓穩壓器
◆I2C接口配置存儲器
◆ 轉速控制:PWM /模擬/ IIC
◆ 支持正反向控制
◆ 睡眠模式
◆ 過流/欠壓/過溫保護
◆ TSSOP24E封裝
關鍵字:電機驅動 電磁感應定律 電磁裝置
引用地址:
電機驅動原理
推薦閱讀最新更新時間:2025-05-20 23:41
DRV8870/DRV8872替代芯片PN7707B 24V直流電機驅動ic
PN7707 24v直流電機驅動ic是用四個功率開關器件所構成的驅動電路,使用MOS管來作為功率開關,DRV8872/DRV8870替代芯片PN7707是一款具有低功耗睡眠模式的兩通道直流馬達驅動芯片,可降低PCB空間的占用,降低成本。 DRV8872/DRV8870替代芯片PN7707特征 ■ 寬電源電壓范圍:3V~24V ■ 低導通電阻(HS:0.3ohm;LS:0.3ohm) ■ 正轉、反轉、剎車和睡眠模式 ■ 低睡眠電流:IVCC 10uA(IN1=IN2=“L”,維持1ms 以上) ■ 輸入管腳兼容5V和3.3V控制信號 ■ 3A峰值驅動輸出,2A連續驅動輸出 ■ 異常保護反饋功能 PN7707寬電源
[嵌入式]

基于安森美的4KW 650V工業電機驅動方案
致力于亞太地區市場的領先半導體元器件分銷商---大聯大控股宣布,其旗下世平推出基于安森美(onsemi)NFAM5065L4B智能功率整合模塊(IPM)的4KW 650V工業電機驅動方案。 圖示1-大聯大世平基于onsemi產品的4KW 650V工業電機驅動方案的展示板圖 近年來,隨著科技高速發展以及工業4.0的加速推進,工業市場對于電機的需求與日俱增。根據相關機構調查顯示電機的耗電量約為全球電力供應的50%。這在節能減排、實現“雙碳”的統一戰略目標下,是一項亟待解決的問題。為了提升電機運轉效率降低能源損耗,大聯大世平基于onsemi產品推出了4KW 650V工業電機驅動方案,該方案可為設計高效率與低功耗的工業電機驅動提
[嵌入式]
BridgeSwitch電機驅動器如何從不同方向解決問題
電機是目前世界上最大的電力消耗者,并且占比非常大。荷蘭能源研究中心(ECN)估計,全球發電量的45%是由電機消耗的。因此,為了推動效率的提高,各國正通過立法手段來提高電機的效率標準。2021年7月,歐盟開始實施“電機和變速驅動裝置條例(EU) 2019/1781”,對之前被排除在標準之外的一些電機增加了最低效率限值,并縮短了為其他類型電機符合效率要求所預留的時間。此類法規顯示的趨勢很明顯——所允許的最低效率將隨著時間的推移不斷提高。新的電機設計應盡可能的高效,以避免在其工作壽命結束前就被立法強制替換的風險。 這些法律涵蓋了各種各樣的電機,從基礎設施泵中的大型電機到為PC風扇供電的微型電機。尺寸不是唯一的考慮因素,電機的類型也很
[嵌入式]
STM32F103C8T6 ULN2003步進電機驅動代碼
步進電機的驅動原理特別簡單百度一下就OK了。 以下是用流水燈改進的代碼。很垃圾但是可以使用!!! 僅供測試 #include stm32f10x.h #include delay.h #include sys.h void Delay(u32 count) { u32 i=4000; for(;i count;i++); } int main(void) { int t=500000; GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIO
[單片機]
步進電機驅動程序
#include #define uint unsigned int sbit A=P1^0; //控制A的電流方向,0為反,1為正 sbit di=P1^1; sbit A1=P1^2; sbit A2=P1^3; //控制A的速度 sbit B1=P1^4; sbit B2=P1^5; //控制B的速度 void delayms(uint z) { uint x,y; for(x=z;x 0;x--) for(y=110;y 0;y--); } void run() { A=0; A1=0; A2=0; delayms(5); di=1; B1=0; B2=0; delayms(5); A=1;
[單片機]
意法半導體推出高功率密度500W/cm2智能電機驅動器
整合85V/10A功率級和數字運動引擎的powerSTEP技術實現了空前的高集成度,運動更順暢,定位更精準 意法半導體(STMicroelectronics,簡稱ST;紐約證券交易所代碼:STM)推出新款 powerSTEP 電機驅動器,精巧的電機控制設計能夠支持應用在芯片上直接執行高功率工作。這款全功能集成的步進電機驅動器(stepper-motor driver)系統封裝(SiP, System-in-Package)提供高達500W/cm 2 的業界最高功率密度,將協助自動化設備廠商設計符合高成本效益的電機控制系統,在提高性能和可靠性的同時不會犧牲靈活性或耐用性。 powerSTEP 是一個14mm x
[工業控制]
基于SMA7029M的步進電機驅動設計
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。 1 步進電機特點及驅動 步進電機受脈沖電流控制,每輸入一個脈沖電機轉軸步進一個步距角增量。轉子的角位移正比于輸入脈沖的數量,轉子的角速度正比于輸入脈沖的頻率,轉子的旋轉方向取決于定子繞組的通電順序。在使用過程
[嵌入式]
兩相4線步進電機驅動
前段時間在出去買東西的時候經過一個廢品收購站,看到一位阿姨正在從一臺什么機器上面拆零件。具體是什么機器我也不認識,我突然看到她拆下來一個圓圓的東西,走進一看原來是一個電機,有四根線,我當時想肯定是一個步進電機。雖然年份久遠但是質量看起來還不錯,我當時就很喜歡。問阿姨這個多少錢我想買下來。阿姨說十塊錢,一分也不能少。沒有辦法我就發十塊錢買下這個“鐵塊子“!由于時間的關系一直沒有機會折騰。今天有點時間所以就拿出來研究一下。 經過測量這是一個兩項四線的步進電機,步進角為1.8度。有兩種工作方式。一種是4拍的方式,一種是8拍的方式,4拍方式的時序如下: a~ 和b~ 表示反向電流。 ab -
[單片機]
 怎樣識讀電氣控制電路圖(鄭鳳翼)
怎樣識讀電氣控制電路圖(鄭鳳翼) 自動識別的垃圾清掃車
自動識別的垃圾清掃車 儀器分析 (郭旭明,韓建國)
儀器分析 (郭旭明,韓建國) 電子工程師必讀元器件與技術
電子工程師必讀元器件與技術













 京公網安備 11010802033920號
京公網安備 11010802033920號