



自動(dòng)駕駛能否識(shí)別障礙物的能力與環(huán)境感知同等重要,如何安全有效的規(guī)劃行駛路線,是自動(dòng)駕駛汽車需解決的最大的難題之一。事實(shí)上,路徑規(guī)劃技術(shù),現(xiàn)階段是一個(gè)非常活躍的研究領(lǐng)域。路徑規(guī)劃之所以如此復(fù)雜,是因?yàn)槠浜w了自動(dòng)駕駛的所有技術(shù)領(lǐng)域,從最基礎(chǔ)的制動(dòng)器,到感知周圍環(huán)境的傳感器,再到定位及預(yù)測(cè)模型等等。準(zhǔn)確的路徑規(guī)劃,要求汽車要理解我們所處的位置以及周邊的物體(其他車輛、行人、動(dòng)物等)會(huì)在接下來的幾秒鐘內(nèi)采取什么樣的行為。

首先來說一下三個(gè)名詞:路徑規(guī)劃、避障規(guī)劃、軌跡規(guī)劃
路徑規(guī)劃通常指全局的路徑規(guī)劃,也可以叫全局導(dǎo)航規(guī)劃,從出發(fā)點(diǎn)到目標(biāo)點(diǎn)之間的純幾何路徑規(guī)劃,無關(guān)時(shí)間序列,無關(guān)車輛動(dòng)力學(xué)。
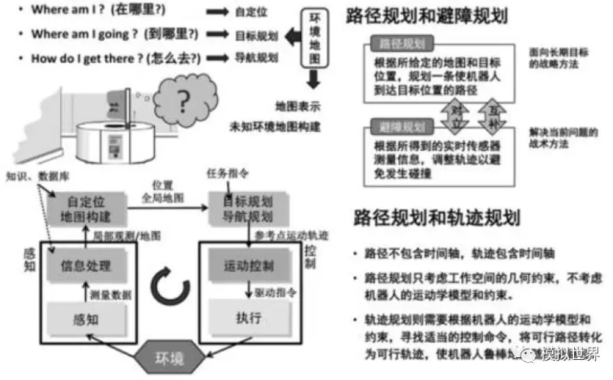
避障規(guī)劃又叫局部路徑規(guī)劃,又可叫動(dòng)態(tài)路徑規(guī)劃,也可以叫即時(shí)導(dǎo)航規(guī)劃。 主要是探測(cè)障礙物,并對(duì)障礙物的移動(dòng)軌跡跟蹤( Moving Object Detection and Tracking ,一般縮寫為MODAT)做出下一步可能位置的推算,最終繪制出一幅包含現(xiàn)存碰撞風(fēng)險(xiǎn)和潛在碰撞風(fēng)險(xiǎn)的障礙物地圖,這個(gè)潛在的風(fēng)險(xiǎn)提示是100毫秒級(jí),未來需要進(jìn)一步提高,這對(duì)傳感器、算法的效率和處理器的運(yùn)算能力都是極大的挑戰(zhàn),避障規(guī)劃不僅考慮空間還考慮時(shí)間序列,在復(fù)雜的市區(qū)運(yùn)算量驚人,可能超過30TFLOPS,這是無人車難度最高的環(huán)節(jié)。未來還要加入V2X地圖,避障規(guī)劃會(huì)更復(fù)雜,加入V2X地圖,基本可確保無人車不會(huì)發(fā)生任何形式的主動(dòng)碰撞。
軌跡規(guī)劃則源自機(jī)器人研究,通常是說機(jī)械臂的路徑規(guī)劃。 在無人車領(lǐng)域,軌跡規(guī)劃的定義感覺不統(tǒng)一。有人將避障規(guī)劃與軌跡規(guī)劃混淆了。軌跡規(guī)劃應(yīng)該是在路徑規(guī)劃和避障規(guī)劃的基礎(chǔ)上,考慮時(shí)間序列和車輛動(dòng)力學(xué)對(duì)車輛運(yùn)行軌跡的規(guī)劃,主要是車縱向加速度和車橫向角速度的設(shè)定。將設(shè)定交給執(zhí)行系統(tǒng),轉(zhuǎn)向、油門、剎車。如果有主動(dòng)懸掛,那么軌跡規(guī)劃可能還要考慮地形因素。
三大規(guī)劃是無人車最復(fù)雜的部分,算法多不勝數(shù),讓人眼花繚亂,這也是百度、谷歌和蘋果科技巨頭要切入無人車領(lǐng)域的主要原因,這些科技巨頭最擅長(zhǎng)的就是算法的優(yōu)化整合。當(dāng)然傳統(tǒng)車廠如福特和豐田,擁有對(duì)車輛動(dòng)力學(xué)的絕對(duì)優(yōu)勢(shì),在此領(lǐng)域?qū)嵙Σ⒉槐瓤萍季揞^要差,尤其是豐田,從開源 SLAM到KITTI,軟件實(shí)力絲毫不次于谷歌。
對(duì)于全局型路徑規(guī)劃不算復(fù)雜,前提是有拓?fù)浼?jí)地圖,這對(duì)地圖廠家來說很容易的。對(duì)于非地圖廠家是有點(diǎn)麻煩的,不過只能算小麻煩。
今天我們重點(diǎn)了解一下避障規(guī)劃,避障規(guī)劃的前提是對(duì)周圍環(huán)境有深刻的理解,有一個(gè)非常完善實(shí)時(shí)的環(huán)境理解。
在此之前不得不先要理解無人駕駛避障的含義,很明顯我們根據(jù)無人駕駛避障的過程,可以將無人駕駛避障分成三個(gè)方面:
1.運(yùn)動(dòng)障礙物檢測(cè):對(duì)運(yùn)動(dòng)過程中環(huán)境中的運(yùn)動(dòng)障礙物進(jìn)行檢測(cè),主要由車載環(huán)境感知系統(tǒng)完成。
2.運(yùn)動(dòng)障礙物碰撞軌跡預(yù)測(cè):對(duì)運(yùn)動(dòng)過程中可能遇到的障礙物進(jìn)行可能性評(píng)級(jí)與預(yù)測(cè),判斷與無人駕駛車輛的碰撞關(guān)系。(當(dāng)你檢測(cè)到障礙物后,你就得讓機(jī)器判斷是否會(huì)與汽車相撞)
3.運(yùn)動(dòng)障礙物避障:通過智能決策和路徑規(guī)劃,使無人駕駛車輛安全避障,由車輛路徑?jīng)Q策系統(tǒng)執(zhí)行。(判斷了可能會(huì)與汽車發(fā)生碰撞的障礙物后,你就得去讓機(jī)器做出決策來避障了)
運(yùn)動(dòng)障礙物檢測(cè)方法
運(yùn)動(dòng)障礙物檢測(cè)根據(jù)他們的sensor主要分成兩類:
一種是基于立體視覺的
運(yùn)動(dòng)障礙物碰撞軌跡預(yù)測(cè)
這一部分與障礙物的檢測(cè)識(shí)別分不開的。無人車的感知系統(tǒng)需要實(shí)時(shí)識(shí)別和追蹤多個(gè)運(yùn)動(dòng)目標(biāo)(Multi-ObjectTracking,MOT),例如車輛和行人。
物體識(shí)別是計(jì)算機(jī)視覺的核心問題之一,最近幾年由于深度學(xué)習(xí)的革命性發(fā)展,計(jì)算機(jī)視覺領(lǐng)域大量使用CNN,物體識(shí)別的準(zhǔn)確率和速度得到了很大提升,但總的來說物體識(shí)別算法的輸出一般是有噪音的:物體的識(shí)別有可能不穩(wěn)定,物體可能被遮擋,可能有短暫誤識(shí)別等。自然地,MOT問題中流行的Tracking-by-detection方法就要解決這樣一個(gè)難點(diǎn):如何基于有噪音的識(shí)別結(jié)果獲得魯棒的物體運(yùn)動(dòng)軌跡。
運(yùn)動(dòng)障礙物的避障本質(zhì)上它是一個(gè)路徑規(guī)劃的過程:在路段上有未知障礙物的情況下,按照一定的評(píng)價(jià)標(biāo)準(zhǔn),尋找一條從起始狀態(tài)到目標(biāo)狀態(tài)的無碰撞路徑。
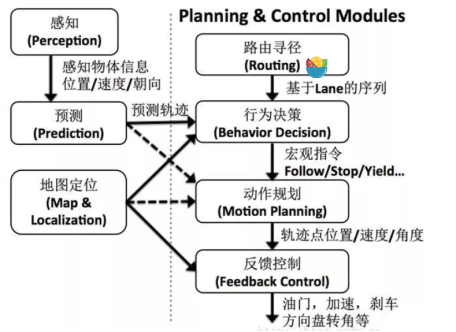
預(yù)測(cè)
預(yù)測(cè)模塊的作用是對(duì)感知所探測(cè)到的物體進(jìn)行行為預(yù)測(cè),并且將預(yù)測(cè)的結(jié)果具體化為時(shí)間空間維度的軌跡傳遞給下游模塊:行為決策模塊。然后行為決策模塊結(jié)合路由尋徑模塊從而進(jìn)行行為決策。

這些選擇就是結(jié)合高精地圖的全局規(guī)劃,然后再通過汽車周邊傳感器感知的信息進(jìn)行局部規(guī)劃,從而判斷汽車是否右轉(zhuǎn)、直行or并道。


上一篇:地平線余凱:未來要拿到全球1/3市場(chǎng),助力國產(chǎn)汽車崛起
下一篇:采用微處理器W87E58實(shí)現(xiàn)倒車多媒體可視測(cè)距顯示器的設(shè)計(jì)
推薦閱讀
史海拾趣
在2010年代初,隨著科技的飛速發(fā)展,電子行業(yè)正迎來新一輪的創(chuàng)新浪潮。這時(shí),一群充滿激情和夢(mèng)想的工程師在硅谷創(chuàng)立了Facon公司,他們懷揣著改變世界的愿景,立志在電子行業(yè)中留下自己的印記。初始階段,F(xiàn)acon主要專注于研發(fā)高性能的半導(dǎo)體芯片,為智能手機(jī)、平板電腦等電子產(chǎn)品提供強(qiáng)大的計(jì)算能力。通過不懈努力和持續(xù)創(chuàng)新,F(xiàn)acon逐漸在市場(chǎng)中樹立了良好的口碑。
在電子行業(yè)的快速發(fā)展中,芯力微公司始終保持著敏銳的市場(chǎng)洞察力。2010年,隨著智能手機(jī)市場(chǎng)的崛起,公司迅速識(shí)別到電源管理芯片的巨大潛力。通過持續(xù)的技術(shù)研發(fā),芯力微成功推出了具有低壓低功耗特點(diǎn)的電源管理芯片,贏得了市場(chǎng)的廣泛認(rèn)可。這一技術(shù)突破不僅幫助公司進(jìn)入了新的市場(chǎng)領(lǐng)域,也為后續(xù)的發(fā)展奠定了堅(jiān)實(shí)的基礎(chǔ)。
隨著戰(zhàn)后的經(jīng)濟(jì)復(fù)蘇和科技的快速發(fā)展,GI開始積極尋求業(yè)務(wù)多元化和國際化的發(fā)展道路。公司不僅繼續(xù)深耕電子技術(shù)領(lǐng)域,還逐漸涉足通信、計(jì)算機(jī)等多個(gè)領(lǐng)域,推出了包括通信設(shè)備、計(jì)算機(jī)硬件在內(nèi)的多款新產(chǎn)品。同時(shí),GI也積極開拓海外市場(chǎng),通過設(shè)立分支機(jī)構(gòu)、與當(dāng)?shù)仄髽I(yè)合作等方式,成功將產(chǎn)品銷往全球多個(gè)國家和地區(qū)。這一階段的成功,使GI成為了名副其實(shí)的跨國電子巨頭。
隨著技術(shù)的不斷進(jìn)步和市場(chǎng)的不斷變化,CR Magnetics意識(shí)到只有不斷創(chuàng)新才能在競(jìng)爭(zhēng)中立于不敗之地。因此,公司加大了研發(fā)投入,積極引進(jìn)新技術(shù)和新材料,不斷推出具有創(chuàng)新性和競(jìng)爭(zhēng)力的新產(chǎn)品。例如,公司研發(fā)的直流傳感器在行業(yè)內(nèi)享有很高的聲譽(yù),廣泛應(yīng)用于電池充電等領(lǐng)域。此外,公司還推出了一系列模擬量傳感器、ANSI和商業(yè)級(jí)電流互感器等,滿足了不同客戶的需求。
盡管Echelon在能源管理領(lǐng)域取得了顯著的成績(jī),但公司也面臨著一些挑戰(zhàn)。隨著數(shù)字化、智能化技術(shù)的不斷發(fā)展,傳統(tǒng)能源管理市場(chǎng)正在發(fā)生深刻變革。為了應(yīng)對(duì)這些挑戰(zhàn),Echelon積極調(diào)整戰(zhàn)略方向,加大在數(shù)字化、智能化技術(shù)方面的投入。同時(shí),公司還加強(qiáng)了對(duì)新興市場(chǎng)的關(guān)注和布局,尋找新的增長(zhǎng)點(diǎn)。未來,Echelon將繼續(xù)秉承創(chuàng)新、合作、共贏的理念,推動(dòng)能源管理行業(yè)的持續(xù)發(fā)展和進(jìn)步。
進(jìn)入21世紀(jì)后,Echelon在智能樓宇領(lǐng)域取得了重大突破。公司憑借其先進(jìn)的LonWorks技術(shù)和能源管理服務(wù)方案,成功為多個(gè)大型樓宇提供了智能化的能源管理解決方案。這些解決方案不僅提高了樓宇的能源利用效率,還降低了運(yùn)行成本,贏得了客戶的廣泛贊譽(yù)。Echelon在智能樓宇領(lǐng)域的成功,進(jìn)一步鞏固了其在能源管理市場(chǎng)的領(lǐng)先地位。
|
除了使用WinIo.vxd驅(qū)動(dòng),還有什么別的驅(qū)動(dòng)可以模擬鼠標(biāo)和鍵盤動(dòng)作 我的WinIo.vxd驅(qū)動(dòng)已經(jīng)成功了,但是限制太大了,USB接口的鼠標(biāo)和鍵盤是不能用!!! 除了WinIo.vxd驅(qū)動(dòng),還有別的萬能驅(qū)動(dòng)沒,不但可以在PS/2 接口鼠標(biāo)-鍵盤實(shí)現(xiàn)模擬按鍵,還可以在USB接口鼠標(biāo)-鍵盤實(shí)現(xiàn)模擬按鍵. 能夠提供源代碼網(wǎng)址或者源代碼更好,麻煩 ...… 查看全部問答∨ |
|
|
我最近在學(xué)習(xí)PCI編程,在網(wǎng)上找到了下面一串代碼 char bus;char device; unsigned int ioa0,iod; int scan( ) { bus=0;device=0; for(char i=0;i… 查看全部問答∨ |
在WINCE5.0下實(shí)現(xiàn)音頻的實(shí)時(shí)采集和編解碼,使用的是s3c2440的開發(fā)板,在PC機(jī)上可以實(shí)現(xiàn)G.729的編解碼,但是vc的庫evc是不能直接拿過來用的,請(qǐng)問哪位大俠有可以直接在wince5.0下用的編解碼庫,或者給我一些建議也可以,謝謝了 如果有可以用的庫最好 ...… 查看全部問答∨ |
|
EVC 上的SOCKET問題,新人求大師們教 ,小弟沒有分,不知道為什么,只懇請(qǐng)你們幫忙!!!!!!!!!!! 我手頭上做的是視頻服務(wù)器的的PC客戶端,現(xiàn)在公司需要,轉(zhuǎn)向PDA上WINCE平臺(tái),對(duì)于EVC我只是簡(jiǎn)單的了解一點(diǎn) 現(xiàn)在很關(guān)鍵的地方,就是建立SOCKET連接服務(wù)器的過程,不是很清楚 我用測(cè)試?yán)訌腣C上移植,但是不行,說“找不到ws2_32.lib編譯沒通過” ...… 查看全部問答∨ |
在高頻電路中,如晶振為3.9M,在這樣的電路中,電阻、電容、電感兩端的電壓如何測(cè)量,用平常的數(shù)字萬用表可以測(cè)量出來嗎? 如果可以的話,是用直流檔還是交流檔。 請(qǐng)?jiān)敿?xì)的說明一下。… 查看全部問答∨ |
|
請(qǐng)問怎么樣在wince或pocket 5.0上面調(diào)試驅(qū)動(dòng)程序? 各位: 我手頭上有wince.net 4.2和mobile 5 for pocketpc的PDA, 另外還有一個(gè)在windows下用的攝象頭。 由于上次去好易通面試被面試官問起,你做過驅(qū)動(dòng)開發(fā)嗎?我說沒有,只做過PDA上的應(yīng)用層開發(fā),被鄙視了。回到家里我就下決心要學(xué)嵌入驅(qū)動(dòng)開 ...… 查看全部問答∨ |
準(zhǔn)備基于WINCE進(jìn)行家庭數(shù)碼產(chǎn)品的嵌入式開發(fā),這個(gè)產(chǎn)品是我司基于通用操作系統(tǒng)的 第一個(gè)產(chǎn)品,有網(wǎng)絡(luò)和多媒體功能,想跟您了解一下我司基于哪個(gè)版本進(jìn)行開發(fā)比較合適?5.0 or 6.0? 我司希望做完這個(gè)產(chǎn)品后,無論是軟件還是硬件都能夠成為一個(gè)平 ...… 查看全部問答∨ |
|
Video 37E噴碼機(jī),工作時(shí)時(shí)常出現(xiàn)不噴碼,有時(shí)出現(xiàn)字體壓縮等現(xiàn)象,過一些時(shí)間又自動(dòng)恢復(fù),誰知道是怎么回事啊?… 查看全部問答∨ |
中午在學(xué)校拿到了板子很興奮。研究了下板子,oled使用的是15V的電壓;板上有一顆lattice生產(chǎn)的lc4032v可編程控制器作為開發(fā)板的功能控制器ftdi2232作為rs232轉(zhuǎn)usb接口芯片vp1050 can收發(fā)器插上usb,會(huì)出現(xiàn)一個(gè)小游戲,同時(shí)這個(gè)示 ...… 查看全部問答∨ |


Vishay線上圖書館
- 這款“逆天”電池充滿電僅需18秒!背后藏著什么黑科技?
- 動(dòng)力電池的2025中場(chǎng)戰(zhàn)事
- 高算力支持下,端側(cè)AI模型能給座艙帶來哪些變化?
- Allotrope Energy開發(fā)超級(jí)電容器 使混合動(dòng)力應(yīng)用的性能提高一倍
- 福特汽車申請(qǐng)新專利 或?qū)⑴鋫淇梢苿?dòng)桌子的控制臺(tái)
- 長(zhǎng)城汽車攜手南京藝術(shù)學(xué)院及超高清聯(lián)盟,共推車載音視頻技術(shù)革新
- 用于多網(wǎng)絡(luò)車輛連接的緊湊型18合1Patriot 天線
- 通用汽車自研LMR電池 開啟電動(dòng)汽車競(jìng)爭(zhēng)新戰(zhàn)線
- 華為輔助駕駛新專利公布:多模態(tài)感知技術(shù)提升駕駛安全防護(hù)






 STN2NE06
STN2NE06- 賦能工業(yè)視覺:Teledyne Bumblebee X 5GigE 立體視覺相機(jī)
- 這款“逆天”電池充滿電僅需18秒!背后藏著什么黑科技?
- 動(dòng)力電池的2025中場(chǎng)戰(zhàn)事
- 高算力支持下,端側(cè)AI模型能給座艙帶來哪些變化?
- Allotrope Energy開發(fā)超級(jí)電容器 使混合動(dòng)力應(yīng)用的性能提高一倍
- 福特汽車申請(qǐng)新專利 或?qū)⑴鋫淇梢苿?dòng)桌子的控制臺(tái)
- 長(zhǎng)城汽車攜手南京藝術(shù)學(xué)院及超高清聯(lián)盟,共推車載音視頻技術(shù)革新
- 高壓變頻器在尾氣制酸中的應(yīng)用
- 用于多網(wǎng)絡(luò)車輛連接的緊湊型18合1Patriot 天線
- 多路交通信號(hào)燈狀態(tài)監(jiān)測(cè)系統(tǒng)的設(shè)計(jì)
- 大聯(lián)大世平集團(tuán)有獎(jiǎng)直播:最新功能安全牽引逆變器方案:助力汽車提升續(xù)航與節(jié)省成本!預(yù)約有禮
- 【TI 教室】學(xué)電源,曬成績(jī),挖樓有禮!
- 情人節(jié)禮物:愛要怎么說出口?
- 下載泰克電源設(shè)計(jì)測(cè)試方案+圖文攻略 幫助工程師解決電源效率問題。有好禮
- Microchip有獎(jiǎng)問答 | 新品 MCU 獨(dú)立于內(nèi)核的外設(shè)(CIP)技術(shù)解密
- 【EEWORLD第二十七屆】2011年06月社區(qū)明星人物揭曉!
- 有獎(jiǎng)直播:TI MSP430TM集成可配置信號(hào)鏈模塊在傳感測(cè)量領(lǐng)域的應(yīng)用
- HMD Global官宣!諾基亞1獲Android 10更新
- 華為新機(jī)諜照解密:后置奧利奧三攝,升降攝像頭
- 華為翻蓋折疊手機(jī)專利解密:神似三星Galaxy Z Flip
- 驍龍665手機(jī)只賣2100元 HTC翻身:6月營(yíng)收漲60%
- 小米POCO M2 Pro解密:驍龍720G+6.7寸挖孔屏
- 什么是AUTOSAR?AUTOSAR的概要、背景以及目的
- 佳光科技李鑫:用國產(chǎn)激光雷達(dá)賦能智能汽車產(chǎn)業(yè)
- 博世與戴姆勒自動(dòng)代客泊車技術(shù)首次在華展示
- 后裝電子能應(yīng)2018旺季嗎?看表現(xiàn)
- 沃爾沃玩新花樣,這卡車連駕駛室都沒有?







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)