


自動(dòng)泊車(chē)系統(tǒng)(Automated Parking System,APS)可以通過(guò)車(chē)輛周身搭載的傳感器測(cè)量車(chē)身與周?chē)h(huán)境之間的距離和角度,收集傳感器數(shù)據(jù)計(jì)算出操作流程,同時(shí)調(diào)整方向盤(pán)的轉(zhuǎn)動(dòng)實(shí)現(xiàn)停車(chē)入位。該技術(shù)為停車(chē)帶來(lái)的便利性受到消費(fèi)者的廣泛關(guān)注。
1、功能概述
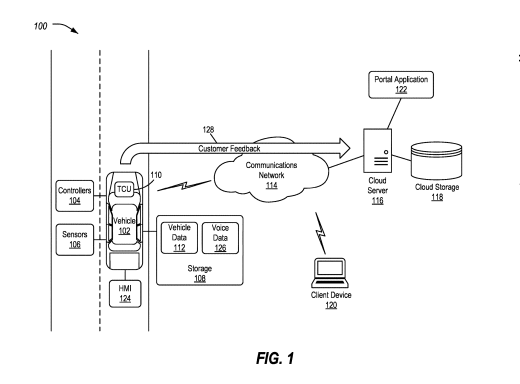
日常生活中側(cè)方向泊車(chē)較常見(jiàn),停車(chē)時(shí)大多無(wú)人指導(dǎo)和幫助,泊車(chē)空間相對(duì)狹小,難度較大。自動(dòng)泊車(chē)過(guò)程可以分為 3 個(gè)部分,分別是車(chē)位探測(cè)、路徑規(guī)劃和路徑追蹤: 車(chē)位探測(cè)就是利用超聲波傳感器等監(jiān)測(cè)本車(chē)與路邊車(chē)輛的距離信息,判斷車(chē)位的長(zhǎng)度是否滿(mǎn)足停車(chē)要求; 路徑規(guī)劃是中央處理器根據(jù)汽車(chē)與目標(biāo)停車(chē)位的相對(duì)位置等數(shù)據(jù),得出汽車(chē)的當(dāng)前位置、目標(biāo)位置及周?chē)沫h(huán)境參數(shù),據(jù)此規(guī)劃計(jì)算出最佳泊車(chē)路徑和策略; 路徑追蹤主要是執(zhí)行路徑規(guī)劃,將相關(guān)策略轉(zhuǎn)化為電信號(hào)傳達(dá)給執(zhí)行器,依據(jù)指令引導(dǎo)汽車(chē)按照規(guī)劃好的路徑泊車(chē)。 2、國(guó)內(nèi)外發(fā)展 APS 最早在 1992 年由大眾在其概念車(chē) IRVW Futura 上搭載,該車(chē)型在行李箱中安裝了如同個(gè)人電腦大小般的計(jì)算機(jī)來(lái)控制整個(gè) APS,由于成本較高,后來(lái)并沒(méi)有將該系統(tǒng)量產(chǎn)。 2003 年,豐田開(kāi)始在普銳斯上提供選裝 APS 功能; 2005 年,雪鐵龍開(kāi)發(fā)出 City Park 系統(tǒng),可以完成側(cè)方停車(chē)、正面停車(chē)、倒車(chē)停車(chē)等幾個(gè)動(dòng)作; 2006 年,英國(guó)版普銳斯加裝 APS 功能約為 700 美元。 隨著該技術(shù)成本的降低和技術(shù)水平的進(jìn)一步提升,現(xiàn)在已經(jīng)有大眾、寶馬、奔馳等多個(gè)企業(yè)的車(chē)型裝備了該系統(tǒng)。 對(duì)于國(guó)內(nèi)產(chǎn)品而言,APS 從高檔轎車(chē)搭載逐漸擴(kuò)展到了向中檔轎車(chē)搭載,10 萬(wàn)~15 萬(wàn)元的緊湊型轎車(chē)的高配版已經(jīng)開(kāi)始搭載 APS,如科魯茲、福克斯等。日系品牌方面,在凱美瑞、銳志、奇駿等產(chǎn)品的高配車(chē)型上搭載了 APS。從自主品牌來(lái)看,東南 DX7 和吉利博瑞的部分車(chē)型也開(kāi)始搭載 APS。 3、技術(shù)特點(diǎn)與難點(diǎn) 3.1 系統(tǒng)架構(gòu) (1)傳感器系統(tǒng):該系統(tǒng)主要任務(wù)是探測(cè)環(huán)境信息,如尋找可用車(chē)位,在泊車(chē)過(guò)程中實(shí)時(shí)探測(cè)車(chē)輛的位置信息和車(chē)身狀態(tài)信息。在車(chē)位探測(cè)階段,采集車(chē)位的長(zhǎng)度和寬度。在泊車(chē)階段,監(jiān)測(cè)汽車(chē)相對(duì)于目標(biāo)停車(chē)位的位置坐標(biāo),進(jìn)而用于計(jì)算車(chē)身的角度和轉(zhuǎn)角等信息,確保泊車(chē)過(guò)程的安全可靠。 (2)中央控制系統(tǒng):該系統(tǒng)為 APS 的核心部分,主要任務(wù)包括以下方面: 首先,接收車(chē)位監(jiān)測(cè)傳感器采集到的信息,計(jì)算車(chē)位的有效長(zhǎng)度和寬度,判斷該車(chē)位是否可用;其次,規(guī)劃泊車(chē)路徑,根據(jù)停車(chē)位和汽車(chē)的相對(duì)位置,計(jì)算出最優(yōu)泊車(chē)路徑; 再次,在泊車(chē)過(guò)程中,實(shí)時(shí)監(jiān)測(cè)。 (3)執(zhí)行系統(tǒng):主要包括電動(dòng)助力轉(zhuǎn)向系統(tǒng)和汽車(chē)發(fā)動(dòng)機(jī)電控系統(tǒng)。根據(jù)中央控制系統(tǒng)的決策信息,電動(dòng)助力轉(zhuǎn)向系統(tǒng)將數(shù)字控制量轉(zhuǎn)化為方向盤(pán)的角度,控制汽車(chē)的轉(zhuǎn)向。汽車(chē)發(fā)動(dòng)機(jī)電控系統(tǒng)控制汽車(chē)油門(mén)開(kāi)度等,從而控制汽車(chē)泊車(chē)速度。電動(dòng)助力轉(zhuǎn)向系統(tǒng)與汽車(chē)發(fā)動(dòng)機(jī)電控系統(tǒng)協(xié)調(diào)配合,控制汽車(chē)按照指定命令完成泊車(chē)過(guò)程。 3.2 技術(shù)特點(diǎn) (1)APS?啟用需要滿(mǎn)足一定速度條件。APS?對(duì)于車(chē)輛行駛速度有限制,一般在車(chē)速低于?30km/h?才可以啟用,從而進(jìn)行車(chē)位探測(cè)。 (2)具備側(cè)方向泊車(chē)、垂直方向泊車(chē)功能模式中的一種或兩種。自動(dòng)泊車(chē)功能模式包括側(cè)方向泊車(chē)、垂直方向泊車(chē),還可附帶自動(dòng)駛出功能。有的車(chē)型具備側(cè)方向泊車(chē)或垂直方向泊車(chē)中的一種,以側(cè)方向泊車(chē)居多,有的車(chē)型同時(shí)具備這兩種模式。 (3)車(chē)位識(shí)別時(shí)對(duì)所需車(chē)位的長(zhǎng)度或?qū)挾扔凶钚∫蟆T谲?chē)輛進(jìn)行車(chē)位識(shí)別時(shí),會(huì)根據(jù)執(zhí)行自動(dòng)泊車(chē)所需車(chē)位的最小長(zhǎng)度或?qū)挾葋?lái)判斷車(chē)位是否可用。側(cè)方向泊車(chē)的情況下,一般要求車(chē)位最小長(zhǎng)度是車(chē)身長(zhǎng)度的 1.2 倍(約車(chē)長(zhǎng) +0.8 m);垂直方向泊車(chē)的情況下,一般要求車(chē)位最小寬度是車(chē)身寬度的 1.5 倍(約車(chē)寬 +0.8 m)。 (4)半自動(dòng)泊車(chē)和全自動(dòng)泊車(chē)。如果在泊車(chē)過(guò)程中,車(chē)輛制動(dòng)、加速需要駕駛員控制,稱(chēng)之為半自動(dòng)泊車(chē),目前大部分車(chē)型裝備的都是這類(lèi)。也有企業(yè)在開(kāi)發(fā)不需要駕駛員控制的全自動(dòng)泊車(chē)。 (5)大多使用超聲波傳感器。APS 使用超聲波傳感器是主流的技術(shù)方案,探測(cè)距離為 5~8 m,但無(wú)法識(shí)別車(chē)位線(xiàn)。如要識(shí)別車(chē)位線(xiàn),需要增加攝像頭。 3.3 技術(shù)難點(diǎn) (1)車(chē)位探測(cè)與識(shí)別的精準(zhǔn)度 超聲波傳感器近距范圍內(nèi)不受光線(xiàn)影響,數(shù)據(jù)處理簡(jiǎn)單快速,易于做到實(shí)時(shí)控制,在測(cè)量距離、精度方面能達(dá)到工業(yè)實(shí)用的要求,但是存在波束角太大、方向性差、分辨率低、作用距離短等缺點(diǎn)。 攝像頭具有數(shù)據(jù)獲取量大、圖像信息量大、可探斜側(cè)面物體的優(yōu)點(diǎn),但受環(huán)境因素影響較大、運(yùn)算量大。 總之,當(dāng)前的車(chē)位探測(cè)和識(shí)別手段各有優(yōu)缺點(diǎn),如何進(jìn)一步提升探測(cè)與識(shí)別的精準(zhǔn)度是 APS 推廣的主要技術(shù)難點(diǎn)之一。 (2)路徑規(guī)劃 路徑規(guī)劃是 APS 的重要內(nèi)容,主要通過(guò)控制算法來(lái)實(shí)現(xiàn)。該過(guò)程分為 3 個(gè)階段,分別是車(chē)位外起始位置調(diào)整、泊車(chē)入位和車(chē)位內(nèi)姿態(tài)調(diào)整。 車(chē)位外起始位置要在控制算法中設(shè)定相應(yīng)的距離、位置等條件,使得車(chē)輛位置滿(mǎn)足泊車(chē)條件; 泊車(chē)入位階段要建立模型,進(jìn)行合理的路徑規(guī)劃; 在調(diào)整階段,應(yīng)該針對(duì)車(chē)身相對(duì)于車(chē)位的位置和姿態(tài)進(jìn)行系統(tǒng)分析,制定車(chē)輛在車(chē)位內(nèi)調(diào)整的方案,確保車(chē)輛符合條件。 以上控制策略的實(shí)現(xiàn),均需要大量的實(shí)際停車(chē)數(shù)據(jù)分析,并結(jié)合系統(tǒng)采集到的具體車(chē)位條件,將理論和實(shí)際結(jié)合,才能順利實(shí)現(xiàn)路徑規(guī)劃。 (3)泊車(chē)入位過(guò)程控制 泊車(chē)入位是 APS 執(zhí)行機(jī)構(gòu)按照路徑規(guī)劃控制車(chē)輛進(jìn)入車(chē)位,是 APS 的重要環(huán)節(jié)。路徑規(guī)劃是在傳感器測(cè)量的距離信息的基礎(chǔ)上制定的,但是其測(cè)量結(jié)果受環(huán)境影響較大,容易形成誤差。因此,在泊車(chē)入位的過(guò)程中,應(yīng)該注重對(duì)車(chē)輛入位過(guò)程的實(shí)時(shí)控制和調(diào)整,確保對(duì)環(huán)境數(shù)據(jù)的及時(shí)更新和對(duì)路徑的及時(shí)調(diào)整。 4、技術(shù)市場(chǎng)應(yīng)用 近幾年來(lái),越來(lái)越多的企業(yè)開(kāi)始在乘用車(chē)上搭載 APS,從國(guó)內(nèi)市場(chǎng)來(lái)看,裝備 APS 的主要車(chē)型如表 1 所示。 表 1 ?裝備 APS 的主要車(chē)型 根據(jù) 2013~2015 年的市場(chǎng)裝備情況可知,目前裝備 APS 的車(chē)輛迅猛增長(zhǎng),2015 年全年 APS 的裝備量達(dá)到 41.77 萬(wàn)套。從增長(zhǎng)率來(lái)看,2014 年市場(chǎng)競(jìng)爭(zhēng)的加劇促使主流企業(yè)通過(guò)增加科技配置的投入來(lái)提振銷(xiāo)量,因此APS的裝備量增長(zhǎng)較快,與 2013 年相比增幅為 36.56%。進(jìn)入 2015 年,APS 裝備量繼續(xù)攀升,增速高達(dá) 56.32%,如圖 1 所示。 圖 1 ?2013~2015 年 APS 裝備量 圖 2 ?2013~2015 年 APS 裝備率 根據(jù)市場(chǎng)裝備率來(lái)看,APS 的裝備率逐年攀升,但目前僅有 2.77%,如圖 2 所示。隨著 APS 精度的提高和成本的下探,其市場(chǎng)空間將進(jìn)一步打開(kāi)。 圖 3 ?2013~2015 年 APS 裝備量各車(chē)型級(jí)別占比 從車(chē)型級(jí)別來(lái)看,APS 裝備的主要市場(chǎng)是中型車(chē),但是近年來(lái)中型車(chē)裝備量占比逐年下滑,從 2013 年的 73.23 %下降到 57.81%;中大型車(chē)的裝備量占比逐年上升,由 2013 年的 0.11%上升至 2015 年的 13.79%;緊湊型車(chē)的裝備量占比較為穩(wěn)定,3 年來(lái)均維持在 26%~30% 的范圍內(nèi),如圖 3 所示。 5、技術(shù)發(fā)展前景 5.1 技術(shù)發(fā)展趨勢(shì) (1)向全自動(dòng)泊車(chē)發(fā)展 目前的 APS 還需要駕駛員的介入,未來(lái)將向更加智能化發(fā)展,實(shí)現(xiàn)全自動(dòng)泊車(chē),即在系統(tǒng)判定出合適的停車(chē)位后,駕駛員無(wú)需停留車(chē)內(nèi),系統(tǒng)完全自動(dòng)泊車(chē)并熄火。 (2)環(huán)境識(shí)別更加全面 對(duì)車(chē)位周?chē)h(huán)境識(shí)別趨于更加全面,如增加對(duì)車(chē)位線(xiàn)的識(shí)別,保證車(chē)輛停入車(chē)位線(xiàn)之內(nèi),可識(shí)別低矮的障礙物等,這需要在超聲波傳感器的基礎(chǔ)上增加攝像頭,或者單獨(dú)使用攝像頭作為傳感器。 (3)實(shí)現(xiàn)車(chē)庫(kù)自主泊車(chē) 在智能化車(chē)庫(kù)的配合下,由車(chē)庫(kù)與車(chē)輛之間的信息交互進(jìn)行引導(dǎo),實(shí)現(xiàn)車(chē)輛在車(chē)庫(kù)中的自主泊車(chē)。 5.2 市場(chǎng)預(yù)判 結(jié)合行業(yè)發(fā)展現(xiàn)狀和市場(chǎng)分析,可以預(yù)見(jiàn) APS 的普及率將進(jìn)一步提高。隨著 APS 使用頻率和用戶(hù)體驗(yàn)的提升,市場(chǎng)需求有望進(jìn)一步打開(kāi)。預(yù)計(jì) 2020 年,APS 在狹義乘用車(chē)市場(chǎng)的新車(chē)裝備率將達(dá)到 20%,年市場(chǎng)銷(xiāo)量達(dá)到 400 萬(wàn)輛。
上一篇:ADAS單目/雙目/三目到底有什么區(qū)別?
下一篇:Amazon Alexa受熱捧 谷歌及蘋(píng)果互聯(lián)汽車(chē)平臺(tái)將受車(chē)企冷遇
推薦閱讀
史海拾趣
作為一家有社會(huì)責(zé)任感的企業(yè),CST始終關(guān)注環(huán)境保護(hù)和社會(huì)公益事業(yè)。公司嚴(yán)格執(zhí)行環(huán)保法規(guī),積極推廣綠色生產(chǎn)理念,努力減少生產(chǎn)過(guò)程中的污染排放。此外,CST還積極參與社會(huì)公益活動(dòng),為當(dāng)?shù)氐慕逃⑽幕仁聵I(yè)做出了積極貢獻(xiàn)。這些舉措進(jìn)一步提升了CST的企業(yè)形象和社會(huì)聲譽(yù)。
Autotrol公司成立于1964年,最初是一家領(lǐng)先的可定制小功率齒輪馬達(dá)生產(chǎn)商。在初創(chuàng)時(shí)期,公司面臨著激烈的市場(chǎng)競(jìng)爭(zhēng)和技術(shù)挑戰(zhàn)。然而,Autotrol憑借其卓越的技術(shù)實(shí)力和創(chuàng)新能力,成功開(kāi)發(fā)出一系列具有競(jìng)爭(zhēng)力的齒輪馬達(dá)產(chǎn)品,逐漸在市場(chǎng)中脫穎而出。公司不斷完善產(chǎn)品線(xiàn),推出了永久磁鐵同步電動(dòng)機(jī)、滯后電動(dòng)機(jī)和直流齒輪馬達(dá)等,這些產(chǎn)品以其高效、穩(wěn)定的性能贏得了客戶(hù)的信賴(lài)。
隨著公司規(guī)模的不斷擴(kuò)大和市場(chǎng)份額的逐步提升,Autotrol公司開(kāi)始實(shí)施全球化戰(zhàn)略,積極拓展海外市場(chǎng)。公司在全球范圍內(nèi)建立了銷(xiāo)售網(wǎng)絡(luò)和分支機(jī)構(gòu),與當(dāng)?shù)睾献骰锇楣餐_(kāi)拓市場(chǎng)。同時(shí),Autotrol還加大了對(duì)國(guó)際市場(chǎng)的研發(fā)投入,針對(duì)不同地區(qū)的市場(chǎng)需求推出定制化的產(chǎn)品和服務(wù)。通過(guò)全球化戰(zhàn)略的實(shí)施,Autotrol公司的品牌影響力不斷提升,市場(chǎng)地位也日益穩(wěn)固。
請(qǐng)注意,以上故事僅為基于一般行業(yè)知識(shí)和公司概況編寫(xiě)的示例,并不代表Autotrol公司的實(shí)際歷史。如需了解Autotrol公司在電子行業(yè)中的具體發(fā)展故事,建議查閱公司官方網(wǎng)站、行業(yè)報(bào)告或相關(guān)新聞報(bào)道等權(quán)威資料。
Data Translation Inc公司成立于1973年,初期專(zhuān)注于數(shù)據(jù)采集和處理技術(shù)的研發(fā)。在成立初期,公司就憑借對(duì)技術(shù)的深刻理解和敏銳的市場(chǎng)洞察力,成功開(kāi)發(fā)了一系列具有創(chuàng)新性的數(shù)據(jù)采集和處理產(chǎn)品。這些產(chǎn)品不僅滿(mǎn)足了當(dāng)時(shí)工業(yè)界對(duì)高精度、高速度數(shù)據(jù)采集的需求,還引領(lǐng)了整個(gè)行業(yè)的發(fā)展方向。隨著技術(shù)的不斷進(jìn)步和市場(chǎng)需求的不斷變化,Data Translation不斷推出新產(chǎn)品,逐漸確立了其在數(shù)據(jù)采集和處理領(lǐng)域的領(lǐng)先地位。
隨著電子行業(yè)的快速發(fā)展,Bel Fuse意識(shí)到要保持競(jìng)爭(zhēng)力,必須不斷進(jìn)行技術(shù)創(chuàng)新。因此,公司加大了研發(fā)投入,推出了一系列具有創(chuàng)新性的電子元件產(chǎn)品。這些產(chǎn)品不僅滿(mǎn)足了客戶(hù)的需求,還為公司帶來(lái)了可觀(guān)的市場(chǎng)份額。同時(shí),Bel Fuse也開(kāi)始積極尋求全球擴(kuò)張的機(jī)會(huì),通過(guò)設(shè)立海外分公司和建立銷(xiāo)售網(wǎng)絡(luò),進(jìn)一步提升了公司的全球影響力。
FIDELIX公司成立于1990年,是一家專(zhuān)注于存儲(chǔ)芯片研發(fā)與銷(xiāo)售的韓國(guó)企業(yè)。在公司成立初期,F(xiàn)IDELIX憑借對(duì)技術(shù)的深入研究和對(duì)市場(chǎng)的敏銳洞察,成功推出了多款性能優(yōu)越的NAND FLASH(閃存)和SDR/DDR(單/雙數(shù)率同步動(dòng)態(tài)存儲(chǔ)器)等存儲(chǔ)芯片產(chǎn)品。這些產(chǎn)品不僅在韓國(guó)市場(chǎng)上獲得了良好的口碑,同時(shí)也開(kāi)始逐步進(jìn)入國(guó)際市場(chǎng)。
隨著技術(shù)的不斷進(jìn)步和市場(chǎng)的不斷擴(kuò)大,F(xiàn)IDELIX逐漸在韓國(guó)存儲(chǔ)芯片領(lǐng)域嶄露頭角。公司不斷投入研發(fā)資金,加強(qiáng)技術(shù)創(chuàng)新,努力提升產(chǎn)品的性能和品質(zhì)。同時(shí),F(xiàn)IDELIX也積極拓展銷(xiāo)售渠道,與多家國(guó)內(nèi)外知名廠(chǎng)商建立了合作關(guān)系,為公司的持續(xù)發(fā)展奠定了堅(jiān)實(shí)的基礎(chǔ)。
|
具有最優(yōu)共模抑制性能的可變?cè)鲆鎯x用放大器AD8221及其應(yīng)用 摘要:目前市場(chǎng)上大部分儀用放大器的共模抑制比在200Hz處就開(kāi)始衰減,因而難以滿(mǎn)足某些設(shè)計(jì)要求,而美國(guó)ADI公司推出的增益可編程高性能儀用放大器AD8221,則能提供工業(yè)上最高的共模抑制比。AD8221在其增益為1時(shí),能夠在頻率為10kHz處保持大于80dB ...… 查看全部問(wèn)答∨ |
如圖所示,請(qǐng)問(wèn)圖中紅色標(biāo)記的電容具體作用是什么?此圖為一 IP phone中的mic(話(huà)筒)部分電路。怎樣確定其容值?… 查看全部問(wèn)答∨ |
|
老師 在單片機(jī)復(fù)習(xí)中我有一些問(wèn)題 想問(wèn)問(wèn)你 對(duì)一個(gè)8051單片機(jī)應(yīng)用系統(tǒng),已知其時(shí)鐘頻率為6MHz,需將8051片內(nèi)定時(shí)計(jì)數(shù)器設(shè)置成T0:50 ms定時(shí),申請(qǐng)中斷,自啟動(dòng)。此時(shí)TMOD值為多少?TH0|TL0應(yīng)取值多少?… 查看全部問(wèn)答∨ |
請(qǐng)問(wèn)全國(guó)電子大賽要準(zhǔn)備什么模塊? 本帖最后由 paulhyde 于 2014-9-15 09:14 編輯 大家好啦?請(qǐng)問(wèn)全國(guó)電子大賽要準(zhǔn)備什么模塊?請(qǐng)大家指點(diǎn)下 … 查看全部問(wèn)答∨ |
|
請(qǐng)教,avr單片機(jī)C語(yǔ)言編程時(shí),定義一個(gè)變量常用一個(gè)關(guān)鍵字,定義該變量的值是隨時(shí)可以改變的,使用變量時(shí),需要讀取變量值。 來(lái)自EEWORLD合作群:arm linux fpga 嵌入0(49900581)… 查看全部問(wèn)答∨ |
穩(wěn)壓后長(zhǎng)時(shí)間工作會(huì)發(fā)熱 我做了一個(gè)220v穩(wěn)壓5v的東東,是用12v變壓器然后接78M05穩(wěn)到5v的,但是用時(shí)間長(zhǎng)了變壓器會(huì)發(fā)燙,然后功率就不夠了 不會(huì)僅僅是散熱不夠吧,估計(jì)還有其他問(wèn)題,請(qǐng)大牛們指教! 注:78M05輸入端接的220u/16v鉭電容和0.33u電容,輸出端接的47u/6v鉭電 ...… 查看全部問(wèn)答∨ |
|
arm9開(kāi)發(fā)板用無(wú)線(xiàn)網(wǎng)卡能上網(wǎng)嗎 手上有個(gè)arm9的開(kāi)發(fā)板不過(guò)沒(méi)集成3g模塊,不過(guò)有USB接口,是不是通過(guò)usb連接上無(wú)線(xiàn)網(wǎng)卡,就可以上網(wǎng)了啊? 還要做其他事情嗎? 謝謝各位大俠了啊~!… 查看全部問(wèn)答∨ |
我的板子現(xiàn)在遇到了一個(gè)問(wèn)題,板子起來(lái)后,通過(guò)shell下載應(yīng)用程序,有時(shí)候很快有時(shí)候特別慢!而且在shell下運(yùn)行命令,有時(shí)候都會(huì)卡住,過(guò)好長(zhǎng)時(shí)間才能出來(lái)結(jié)果!哪怕就是通過(guò)shell不停的d 內(nèi)存,有時(shí)都會(huì)卡住!請(qǐng)問(wèn)各位大俠,shell下是不是有什么要 ...… 查看全部問(wèn)答∨ |
|
如何在PB下修改一個(gè)和自己板子相似的Wince的BSP包 我的開(kāi)發(fā)板沒(méi)有Wince下的BSP包,CPU是EP9315,我們找了另一塊板子(其CPU也是EP9315)的BSP包,想在上面修改,請(qǐng)教大家,我該如何做?在PB下打開(kāi)哪些文件進(jìn)行修改?我把兩塊板子的原理圖拿來(lái)對(duì)照,不同的地方做上記號(hào),然后在相關(guān)的文件中做修改。 ...… 查看全部問(wèn)答∨ |
各位大俠,小妹是菜鳥(niǎo)級(jí)新手,初來(lái)乍到,幫幫小妹吧!!嗚~~~~~~~~~~~小妹有一篇論文有個(gè)小程序需要在VXWORKS上跑,剛剛裝好TORNADO2.2,請(qǐng)問(wèn)我用VXSIM仿真器來(lái)調(diào)試分析程序,沒(méi)有目標(biāo)機(jī),開(kāi)發(fā)板,沒(méi)有COM口的情況下如何搭建工作環(huán)境呢?就是啟動(dòng)VX ...… 查看全部問(wèn)答∨ |


Vishay線(xiàn)上圖書(shū)館
- 小鵬華為聯(lián)手終結(jié)AR-HUD“三大痛”
- 奔馳,國(guó)軒高科固態(tài)電池正式裝車(chē),續(xù)航超1000km!
- 高功耗芯片如何設(shè)計(jì)滿(mǎn)足散熱需求?
- 智能駕駛仿真研究:仿真走向跨域融合,世界模型應(yīng)用提速
- 國(guó)投招商投資景略半導(dǎo)體,加速車(chē)載芯片國(guó)產(chǎn)替代進(jìn)程
- 正極材料知多少:LFP仍是市場(chǎng)主流,三元體系將持續(xù)滲透30萬(wàn)元以上車(chē)型
- 擺脫中國(guó)電池鏈?特斯拉欲自建電池生產(chǎn)體系
- 大陸集團(tuán)開(kāi)發(fā)出全新傳感器技術(shù) 可減少稀土元素的使用
- 瑞智新能源第一代主動(dòng)功能隔膜:重塑高安全、高倍率電池新時(shí)代






 KBPC606
KBPC606- 小鵬華為聯(lián)手終結(jié)AR-HUD“三大痛”
- 英特爾攜手香港大學(xué)“菁英聚·港大”,推動(dòng)中學(xué)人工智能教育普及
- 奔馳,國(guó)軒高科固態(tài)電池正式裝車(chē),續(xù)航超1000km!
- 高功耗芯片如何設(shè)計(jì)滿(mǎn)足散熱需求?
- 智能駕駛仿真研究:仿真走向跨域融合,世界模型應(yīng)用提速
- 國(guó)投招商投資景略半導(dǎo)體,加速車(chē)載芯片國(guó)產(chǎn)替代進(jìn)程
- 正極材料知多少:LFP仍是市場(chǎng)主流,三元體系將持續(xù)滲透30萬(wàn)元以上車(chē)型
- 擺脫中國(guó)電池鏈?特斯拉欲自建電池生產(chǎn)體系
- 人形機(jī)器人新賽道,湖北想贏
- 大陸集團(tuán)開(kāi)發(fā)出全新傳感器技術(shù) 可減少稀土元素的使用
- 評(píng)論贏好禮|TI SK-AM64評(píng)估套件測(cè)評(píng)
- 有獎(jiǎng)直播:走進(jìn)實(shí)驗(yàn)室之是德科技高端新品示波器UXR-B測(cè)評(píng)
- TI 中國(guó)大學(xué)計(jì)劃20周年狂歡盛宴
- elexcon 2023 報(bào)名推廣
- 【已結(jié)束】RIGOL直播|示波器、可編程直流電源應(yīng)用分享
- 有獎(jiǎng)直播:助力AI算力,下一代GPU服務(wù)器中卡緣高速互連解決方案哪里找?
- ST有獎(jiǎng)直播報(bào)名|介紹CAN總線(xiàn)特別在汽車(chē)應(yīng)用及保護(hù)器件的重要性
- 【新年活動(dòng)】2023,兔 do list!
- EEWORLD社區(qū)5月明星人物出臺(tái)嘍!
- 【開(kāi)發(fā)板試用】89美金FPGA開(kāi)發(fā)板試用風(fēng)暴來(lái)襲!
- 一個(gè)華為老兵解讀聯(lián)想的雞毛信
- 與日本三大運(yùn)營(yíng)商合作,日本成華為繼美國(guó)后第二個(gè)陣地?
- 大陸智能機(jī)為稱(chēng)霸東南亞,不惜血本行銷(xiāo)、賠錢(qián)沖銷(xiāo)量?
- 驍龍845首發(fā),高通今夏推出WPA3安全協(xié)議芯片
- 東芝得救,收購(gòu)案已通過(guò)中國(guó)審批!
- 真八核A55!展銳重磅發(fā)布首款人工智能LTE SoC SC9863
- 拒絕失聯(lián)!衛(wèi)星手機(jī)S601開(kāi)賣(mài):定價(jià)12880元,1740號(hào)段套餐100元起
- 全球前十五大半導(dǎo)體公司排名迎來(lái)最大變化!
- 中高端手機(jī)隱形贏家!一加手機(jī)6發(fā)布,售價(jià)3199元起
- 祖?zhèn)髻N膜要失業(yè)了!貼膜機(jī)器人上線(xiàn) 輕松月入過(guò)萬(wàn)







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)