如果把本次升級按車型劃分:AD Pro平臺主要聚焦于核心軟硬件能力的強化,而AD Max平臺的進化重點則在于VLA司機大模型的落地與拓展。

接下來,我們將聚焦這些升級背后對用戶體驗的實際提升,并進一步探討理想輔助駕駛在2025年所實現的技術突破與理念演進。

Part 1
AD Pro:硬件與軟件協同升級,
輔助駕駛有了新的標準
01
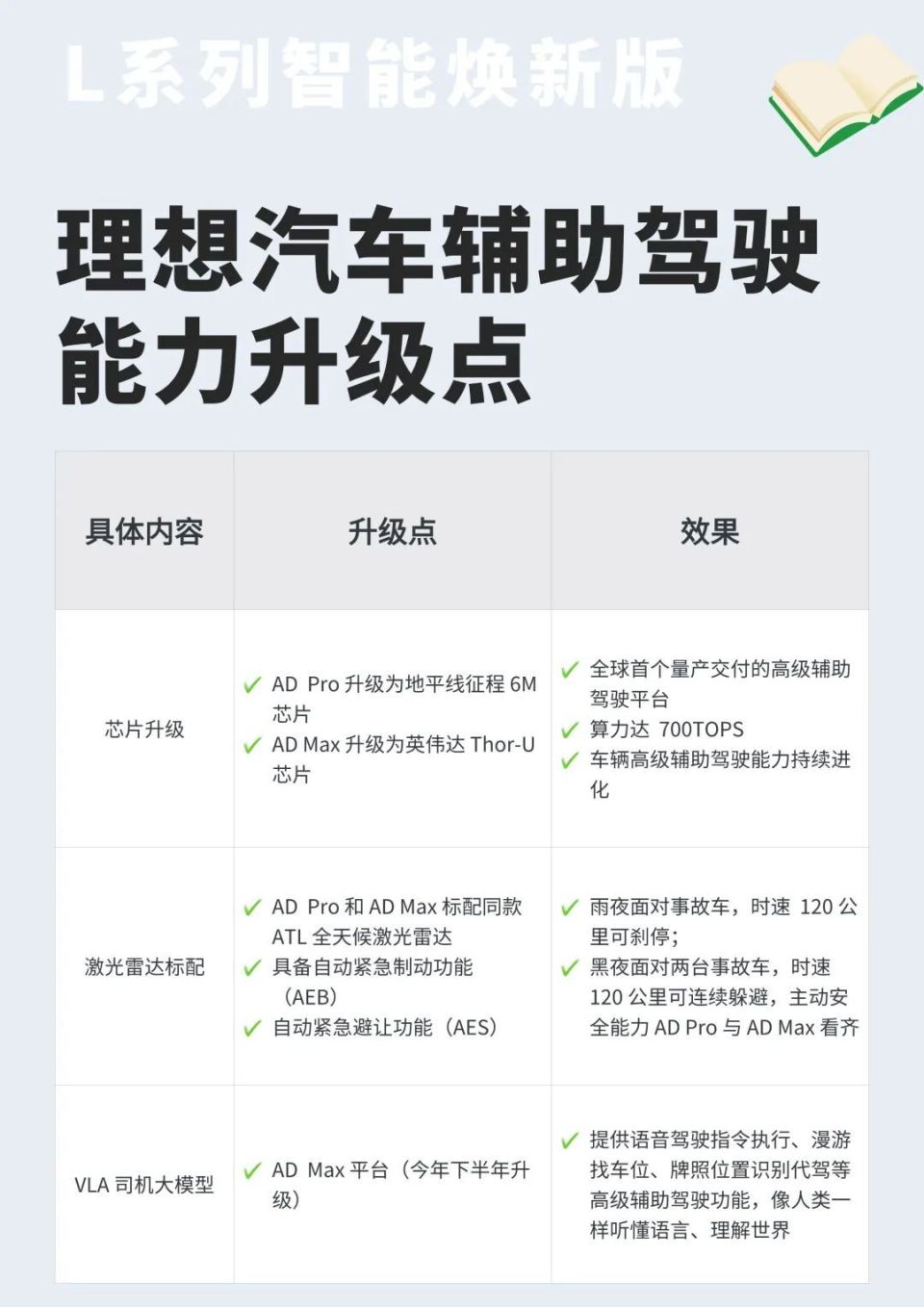
硬件升級,感知能力全面提升
理想的AD Pro平臺在此次煥新中,通過芯片和傳感器的大幅升級,帶來了感知能力的全面提升。這背后不單是硬件的升級,更能對輔助駕駛實用性和安全性帶來推動。
感知力增強 = 安全冗余提升。
感知系統是輔助駕駛的“眼睛”,僅依賴攝像頭,在復雜天氣、弱光、遮擋場景中容易“看不清”。

AD Pro車型升級后標配ATL全天候激光雷達,“全天候”意味著在黑夜、弱光等環境下,都能更好對障礙物、多車事故等復雜場景進行識別,為AEB(自動緊急制動)和AES(自動緊急避讓)提供更可靠的觸發依據。

比如,在黑夜可以實現在時速120km下,識別兩臺事故車并連續躲避,這是傳統感知體系難以實現的。
這套系統是理想與禾賽合作開發,采用第四代芯片和雙核MCU,比之前的激光雷達更小、性能更好,也更美觀。
具體來說探測靈敏度提升130%、體積和重量各減少60%,角分辨率提升至原來的2.5倍達到0.08°x0.1°,最遠探測200米且功耗降低55%。
另外,AD Pro車型升級后新增了800萬像素長焦攝像頭,“長焦”=看得更準,200米的可視距離(30°視野內)可以“看到”更遠的紅綠燈和障礙物,過路口的時候能早做準備。
芯片升級 = 實時計算能力保障。
理想L系列的Pro版本之前搭載地平線征程5芯片;升級后的AD Pro車型用上了地平線最新的6M芯片,CPU計算能力提升4倍,算力提升意味著圖像處理能力提升、內存帶寬與數據讀取能力優化,所以可以支持更復雜算法與擬人化軌跡規劃。
軟件升級,從能用到好用
在輔助駕駛中,硬件決定上限,軟件決定下限。硬件給出了能力邊界,但真正決定系統穩定性、安全性與用戶信任度的,是軟件的持續進化。理想此次圍繞場景策略、決策邏輯等方向的升級,是對軟件價值強化。
輔助駕駛硬件上,AD Pro與AD Max的主要區別在于智駕芯片,但在主動安全能力上并沒有區別,形成360°AEB安全盾,“360°”意味覆蓋低速、異形障礙物、路口轉彎等場景;比如全速域AEB激活(自動緊急制動),所有車速區間內可激活功能;AES(自動緊急避讓)也支持在130km/h觸發。
同時還針對極限場景進行優化,新增二次碰撞預警(SCM)、緊急車道保持(ELK)拓展障礙物識別、前后向誤加速抑制(MAI)功能。
車道居中控制(Lane Centering Control, LCC)原本是比較初級的輔助駕駛功能,結合硬件升級,軟件優化后的AD Pro車型,不僅對紅綠燈、路口選路的感知距離提升(前者從120米提升至180米,后者從80米提升至100米),還可以識別低矮障礙物、施工場景、靜止故障車等并剎停,剎停速度達120km/h。新增旁車剎車燈/轉向燈信息解讀,增強交互預測。
● 泊車體驗創新
新增“車位隨心畫”功能,支持自定義停泊邊界,各種狹窄巷尾與異形車位都能搞定,這也是軟件升級帶來的。

芝能點評:AD Pro平臺的升級,尤其是在感知系統和芯片平臺的優化方面,代表了當前輔助駕駛量產路線中對“安全性”和“多場景適應能力”追求的前沿水平。
其圍繞真實場景的系統級進化,在“能看清”“看得遠”“算得準”“反應快”的四大維度實現均衡突破,將有力支撐理想汽車在輔助駕駛量產競爭中的差異化優勢。
Part 2:AD Max:
從端到端到VLA,
引領AI大模型智駕時代
AD Max平臺此次升級,硬件上搭載了算力高達700TOPS的NVIDIA Thor-U芯片,為高階輔助駕駛提供強大支撐;

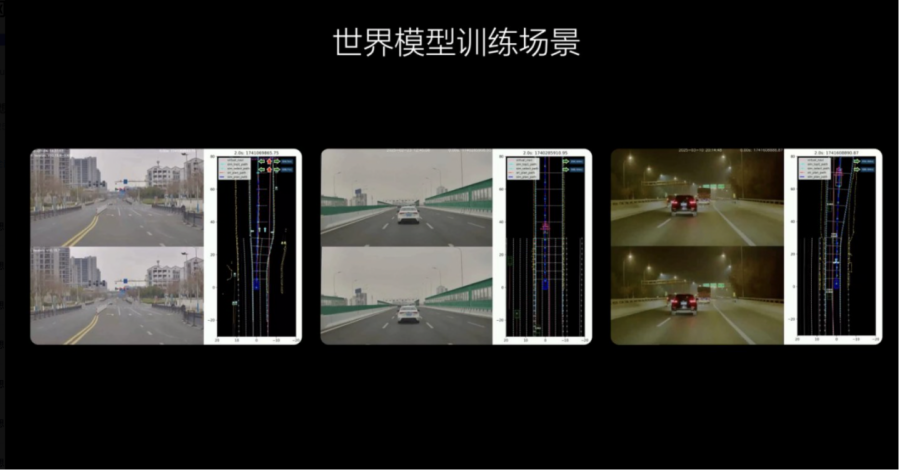
軟件方面,今年下半年將引入VLA大模型,這個技術一方面當然是讓輔助駕駛在復雜場景下的處理能力提升,比如在長尾場景方面,VLA可以增強對環島、潮汐車道、ETC通道等極端工況的適應性;
但更重要的是對自然語言的深度理解——用戶無需下達固定指令,僅通過日常語言表達,如“快點超前面這輛車”或“這段路慢點”,系統便能精準理解意圖并執行相應操作,真正向“類人思維”的輔助駕駛邁進。
理想輔助駕駛系統模型歷經三段跳式發展:
早期依賴規則算法和高精地圖,如同“有軌交通”;隨后端到端模型與VLM大模型結合,提升了泛化能力,但仍難應對長尾問題。
而VLA通過統一視覺、語言與行動智能,突破多模態協同瓶頸,具備3D空間理解與邏輯推理能力,將用戶體驗從輔助工具升級為可溝通、懂意圖的智能司機Agent。
這一突破背后是六大關鍵技術支撐:
Part 3
理想輔助駕駛的核心看點
2025年,是輔助駕駛從“可用”走向“普及”的重要階段。在中國,這一進程正在沿著兩條路徑同步展開:
要贏,就必須雙線推進、雙向領先。
理想輔助駕駛正是以這樣的策略,實現了從“追趕者”到“引領者”的跨越式發展。
AD Pro,普及性路線的天花板。AD Pro專注于將高階能力“做厚”,讓更多用戶用得上、用得起。
通過軟硬件深度協同,AD Pro不僅在體驗和安全性上對齊AD Max,還具備極高的性價比。其配備的全速域AEB、AES、ELK等功能,構建了完善的主動安全閉環,助力輔助駕駛在主流市場全面普及。
AD Max,性能路線的突破者。聚焦性能邊界,AD Max以VLA大模型為核心,率先實現AI大模型量產上車,打破傳統端到端方案的局限,向“類人駕駛”邁出實質性一步。
所以也能看出,本次發布會最具戰略意義的,是VLA技術的推進,從“輔助駕駛”到“通用智能”,是這次理想飛躍的核心。
通過自監督學習與強化學習結合,系統在安全性與舒適性上持續進化,VLA不僅重新定義了輔助駕駛的邊界,也為未來機器人與多行業智能化提供了技術范式。理想汽車正在探索的是一條將“物理世界”與“數字智能”深度融合的路線圖。
小結
理想汽車對智能化的投入與理解,正在成為整個L系列產品的核心競爭力。這次發布會發布的不只是車型智能化的升級,還是理想汽車在技術路線上的戰略定型,對整個產品體系的勝負走向,意義深遠。
上一篇:汽車操作系統,為什么都在開源?
下一篇:最后一頁
- 熱門資源推薦
- 熱門放大器推薦
 機器人學課件PPT
機器人學課件PPT LM158AP
LM158AP
- 四翼撲翼機(仿生鳥)原理及設計解析(含開源代碼)
- AM2S-0505SH30Z 5V 2瓦直流轉直流轉換器的典型應用
- LTC3119MPFE 可選 12V 或 3.3V 輸出、1MHz 穩壓器的典型應用電路
- DRAGONBOARD AUDIO MEZZ,音頻夾層板是創建需要外部音頻的多媒體系統的最簡單方法
- 電賽簡易電路特性測試儀
- 國產老運放復刻-從F001到F007
- 3PHASELV-KIT: 3相無刷直流電機/永磁同步電機低壓電機控制驅動
- NCV33074ADTBR2G Unity Gain Buffer TTL Driver 的典型應用
- 使用 ADG5408 模擬多路復用器的穩健、低功耗、電池監控電路前端
- 使用 Analog Devices 的 LT3663EDCB-5 的參考設計













 京公網安備 11010802033920號
京公網安備 11010802033920號