

TM1637四位數碼管模塊是一個帶時鐘點的4位共陽數碼管(0.36英寸)的顯示模塊,驅動芯片為TM1637,驅動方式為IIC,因此只需2根信號線即可使單片機控制4位8段數碼管(數碼管8級灰度可調)。
控制接口:共4個引腳(GND、VCC、DIO、CLK),GND為地,VCC為供電電源,DIO為數據輸入輸出腳,CLK為時鐘信號腳。
TM1637.h單片機源程序如下:
sbit CLK= P3^4; //定義模擬IIC總線的時鐘線
sbit DIO = P3^5; //定義模擬IIC總線的數據線
code unsigned char tab[] =
{
0x3F,/*0*/
0x06,/*1*/
0x5B,/*2*/
0x4F,/*3*/
0x66,/*4*/
0x6D,/*5*/
0x7D,/*6*/
0x07,/*7*/
0x7F,/*8*/
0x6F,/*9*/
0x77,/*10 A*/
0x7C,/*11 b*/
0x58,/*12 c*/
0x5E,/*13 d*/
0x79,/*14 E*/
0x71,/*15 F*/
0x76,/*16 H*/
0x38,/*17 L*/
0x54,/*18 n*/
0x73,/*19 P*/
0x3E,/*20 U*/
0x00,/*21 黑屏*/
};
void Delay_us(unsigned int i)
{
for(;i>0;i--)
_nop_();;
}
//IIC開始
void TM1637_start(void)
{
CLK=1;
DIO=1;
Delay_us(2);
DIO=0;
}
//IIC應答
void TM1637_ack(void)
{
uchar i;
CLK=0;
Delay_us(5);
//DIO=1;
while(DIO==1&&(i<250))i++;
CLK=1;
Delay_us(2);
CLK=0;
}
//IIC停止
void TM1637_stop(void)
{
CLK=0;
Delay_us(2);
DIO=0;
Delay_us(2);
CLK=1;
Delay_us(2);
DIO=1;
Delay_us(2);
}
//寫數據函數
void TM1637_Write(unsigned char DATA)
{
unsigned char i;
for(i=0;i<8;i++)
{
CLK=0;
if(DATA & 0x01)
DIO=1;
else DIO=0;
Delay_us(3);
DATA=DATA>>1;
CLK=1;
Delay_us(3);
}
//TM1637_ack();
}
//按順序顯示
void TM1637_display(uchar a,uchar b,uchar c,uchar d,uchar h)
{
TM1637_start();
TM1637_Write(0x40);//寫數據+自動地址加1+普通模式
TM1637_ack();
TM1637_stop();
TM1637_start();
TM1637_Write(0xc0);//設置顯示首地址即第一個LED
TM1637_ack();
TM1637_Write(tab[a]);
TM1637_ack();
TM1637_Write(tab[b]|h<<7);//h為1時顯示時鐘中間的兩點
TM1637_ack();
TM1637_Write(tab[c]);
TM1637_ack();
TM1637_Write(tab[d]);
TM1637_ack();
TM1637_stop();
TM1637_start();
TM1637_Write(0x89);//開顯示,2/16亮度
TM1637_ack();
TM1637_stop();
}
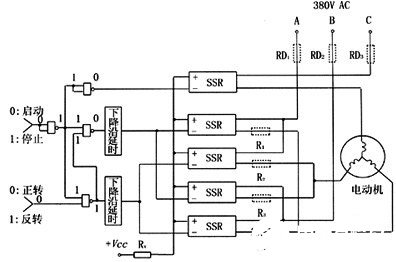
上一篇:51單片機控制電機正反轉
下一篇:DS12887+lcd1602萬年歷仿真原理圖+程序
推薦閱讀
史海拾趣

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 B2B-ZR
B2B-ZR






 京公網安備 11010802033920號
京公網安備 11010802033920號