旋轉(zhuǎn)編碼器 是一種輸入裝置,其幫助用戶與系統(tǒng)進(jìn)行交互。它看起來(lái)更像是一個(gè)無(wú)線電電位器旋轉(zhuǎn)編碼器是一種輸入設(shè)備, 可幫助用戶與系統(tǒng)交互。它看起來(lái)更像是一個(gè)無(wú)線電電位器, 但它輸出一系列脈沖, 這使得它的應(yīng)用獨(dú)特。當(dāng)編碼器的旋鈕旋轉(zhuǎn)時(shí), 它以小步的形式旋轉(zhuǎn), 這有助于它用于 stepper/servo 電機(jī)控制。
在本文中,我們將了解不同類(lèi)型的旋轉(zhuǎn)編碼器及其工作原理。我們還將它與PIC單片機(jī)PIC16F877A連接,并通過(guò)旋轉(zhuǎn)編碼器控制整數(shù)值,并在16 * 2 LCD屏幕上顯示其值。在本教程的最后, 您將會(huì)很樂(lè)意為您的項(xiàng)目使用旋轉(zhuǎn)編碼器。所以讓我們開(kāi)始吧…。
旋轉(zhuǎn)編碼器及其類(lèi)型
旋轉(zhuǎn)編碼器通常稱(chēng)為軸編碼器。它是一個(gè)機(jī)電傳感器, 這意味著它將機(jī)械運(yùn)動(dòng)轉(zhuǎn)換為電子脈沖, 或者換句話說(shuō), 它將角度位置或運(yùn)動(dòng)或軸位置轉(zhuǎn)換為數(shù)字或模擬信號(hào)。它由一個(gè)旋鈕組成, 當(dāng)旋轉(zhuǎn)時(shí), 它將逐步移動(dòng), 并產(chǎn)生每個(gè)步驟具有預(yù)定寬度的脈沖列車(chē)序列。
市場(chǎng)上有很多種類(lèi)型的旋轉(zhuǎn)編碼器, 設(shè)計(jì)師可以根據(jù)自己的應(yīng)用選擇一種。下面列出了最常見(jiàn)的類(lèi)型
絕對(duì)編碼器
磁性編碼器
光學(xué)編碼器
激光編碼器
這些編碼器是基于輸出信號(hào)和傳感技術(shù)進(jìn)行分類(lèi)的, 增量編碼器和絕對(duì)編碼器是根據(jù)輸出信號(hào)進(jìn)行分類(lèi)的, 磁編碼器和激光編碼器是基于傳感技術(shù)進(jìn)行分類(lèi)的。此處使用的編碼器是增量類(lèi)型的編碼器。
絕對(duì)編碼器即使在斷電后也會(huì)存儲(chǔ)位置信息, 當(dāng)我們?cè)俅螌?duì)其通電時(shí), 位置信息也會(huì)可用。
另一種基本類(lèi)型, 增量編碼器提供數(shù)據(jù)時(shí), 編碼器更改它的位置。它無(wú)法存儲(chǔ)倉(cāng)位信息。
ky-040 旋轉(zhuǎn)編碼器夾頭及說(shuō)明
ky-040 增量型旋轉(zhuǎn)編碼器的針腳如下所示。在這個(gè)項(xiàng)目中, 我們將與來(lái)自微芯片的流行微控制器 pic16f877a 接口這個(gè)旋轉(zhuǎn)編碼器。

前兩個(gè)引腳 (接地和 vcc) 用于為編碼器供電, 通常使用 + 5v 電源。除了以順時(shí)針和逆時(shí)針?lè)较蛐D(zhuǎn)旋鈕外, 編碼器還具有一個(gè)開(kāi)關(guān) (活動(dòng)低), 可通過(guò)按內(nèi)旋鈕進(jìn)行按壓。此開(kāi)關(guān)的信號(hào)是通過(guò)引腳 3 (sw) 獲得的。最后, 它有兩個(gè)輸出引腳 (dt 和 clk), 產(chǎn)生波形, 如下所述。我們以前把這個(gè)旋轉(zhuǎn)編碼器與 arduino 接口過(guò)。
旋轉(zhuǎn)編碼器的工作原理
輸出完全取決于內(nèi)部銅墊, 提供與 gnd 和 vcc 與軸的連接。
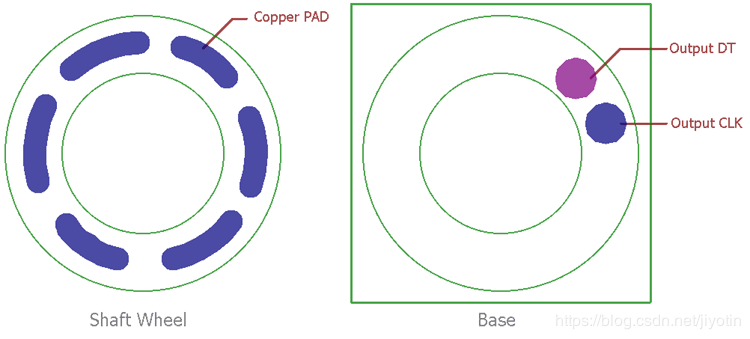
旋轉(zhuǎn)編碼器有兩個(gè)部分。軸輪, 它與軸連接, 并根據(jù)軸的旋轉(zhuǎn)和完成電氣連接的底座順時(shí)針或逆時(shí)針旋轉(zhuǎn)。基座具有連接到 dt 或 clk 的端口或點(diǎn), 這樣當(dāng)軸輪旋轉(zhuǎn)時(shí), 它將連接基點(diǎn), 并在 dt 和 clk 端口上提供方波。
輸出將像軸旋轉(zhuǎn)時(shí)
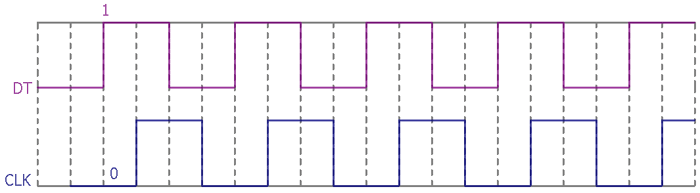
兩個(gè)端口提供方波,但時(shí)序略有不同。因此,如果我們接受輸出為1和0,則只能有四個(gè)狀態(tài),0 0,1 0,1 1,0 1.二進(jìn)制輸出的序列決定順時(shí)針轉(zhuǎn)動(dòng)或逆時(shí)針轉(zhuǎn)動(dòng)。例如,如果旋轉(zhuǎn)編碼器在空閑狀態(tài)下提供1 0并在此之后提供1 1,則意味著編碼器將其位置向順時(shí)針?lè)较蚋淖円徊剑绻诳臻e1 0之后提供0 0,則意味著軸一步一步地沿逆時(shí)針?lè)较蜣D(zhuǎn)動(dòng)其位置。
所需組件
現(xiàn)在是確定我們需要什么接口旋轉(zhuǎn)編碼器與 pic 微控制器的時(shí)候了,
PIC16F877A
電阻器
1k電阻器
10k
4.7k電容器33pF陶瓷圓盤(pán)電容器 - 2個(gè)
20Mhz晶體
16x2顯示
旋轉(zhuǎn)編碼器
5V適配器。
面包板
連接線。
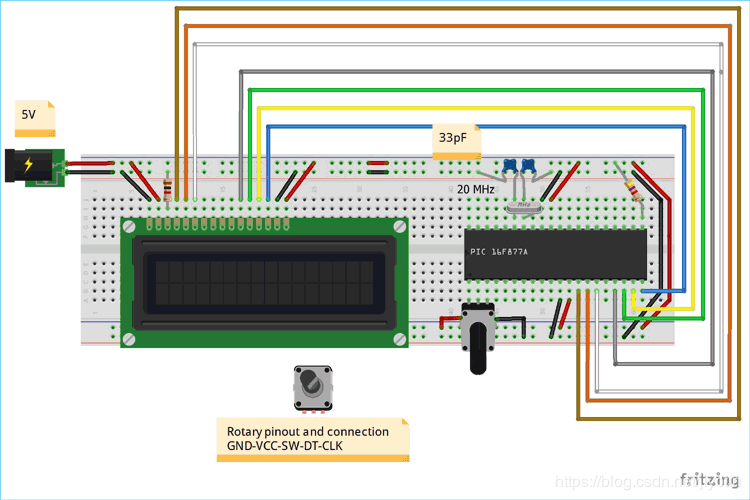
PIC16F877A旋轉(zhuǎn)編碼器接口電路圖
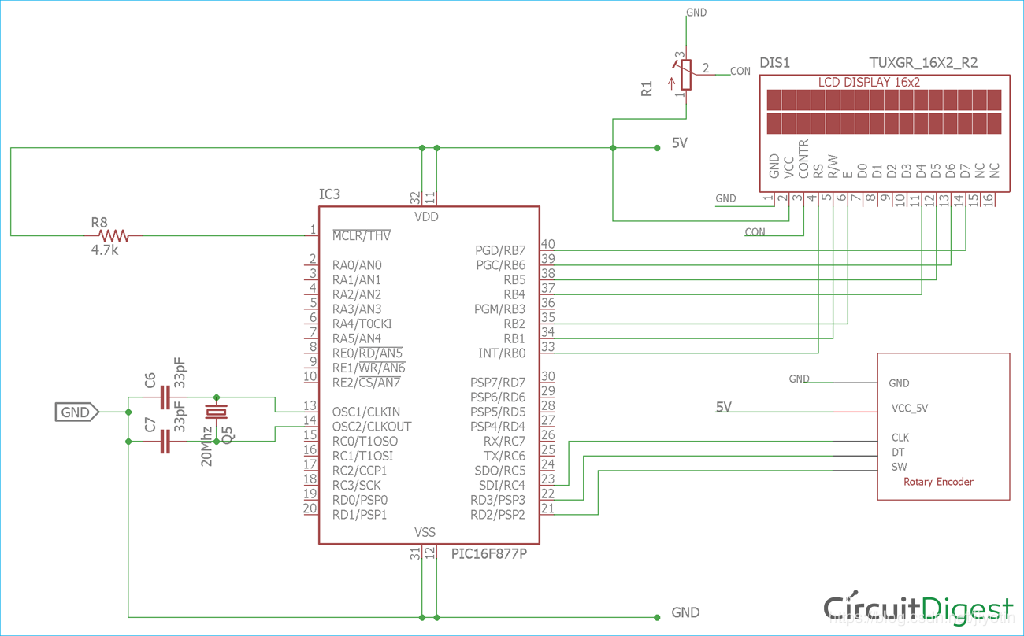
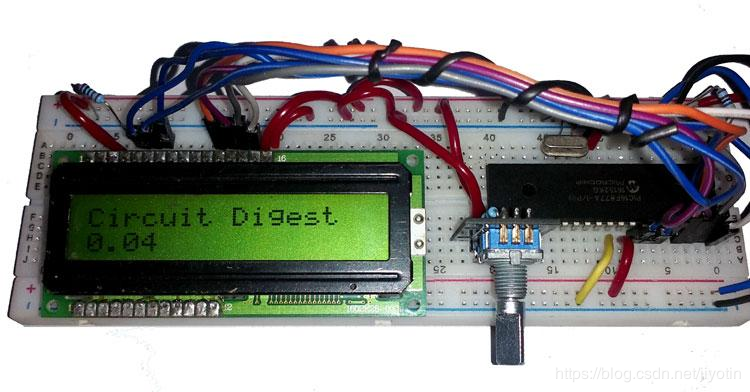
下面是根據(jù)電路圖連接組件后的最終設(shè)置圖:
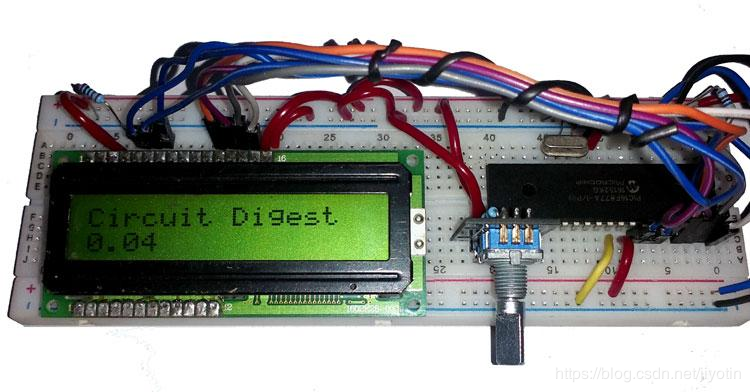
我們使用單個(gè)1K電阻來(lái)代替LCD的對(duì)比度,而不是使用電位計(jì)。
代碼說(shuō)明
完整的PIC代碼 在本項(xiàng)目的最后給出了 演示視頻,這里我們將解釋代碼的一些重要部分。如果您是PIC微控制器的就遵循我們的 新手,請(qǐng)PIC教程 從一開(kāi)始。
正如我們之前討論的那樣,我們需要 檢查輸出并區(qū)分DT和CLK的二進(jìn)制輸出,因此我們創(chuàng)建了一個(gè) if-else為操作部分。
if (Encoder_CLK != position){
if (Encoder_DT != position){
// lcd_com (0x01);
counter++; // Increase the counter which will be printed on the lcd
lcd_com (0xC0);
lcd_puts(" ");
lcd_com (0xC0);
lcd_bcd(1,counter);
}
else{
// lcd_com (0x01);
lcd_com (0xC0);
counter--; // decrease the counter
lcd_puts(" ");
lcd_com (0xC0);
lcd_bcd(1,counter);
//lcd_puts("Left");
}
}
我們還需要在每一步上存儲(chǔ)位置。為此, 我們使用了一個(gè)存儲(chǔ)當(dāng)前位置的變量 “position”。
position = Encoder_CLK; // It is to store the encoder clock position on the variable. Can be 0 or 1
除此之外,還提供了一個(gè)選項(xiàng),用于 通知開(kāi)關(guān)按壓LCD上的。
if (Encoder_SW == 0)
{
sw_delayms(20); //debounce delay
if (Encoder_SW == 0)
{ //lcd_com(1);
//lcd_com(0xC0);
lcd_puts ("switch pressed");
// itoa(counter, value, 10);
// lcd_puts(value);
}
}
系統(tǒng) _ init 函數(shù)用于初始化引腳 ito 操作、lcd 和存儲(chǔ)旋轉(zhuǎn)編碼器位置。
void system_init()
{
TRISB = 0x00; // PORT B as output, This port is used for LCD
TRISDbits.TRISD2 = 1;
TRISDbits.TRISD3 = 1;
TRISCbits.TRISC4 = 1;
lcd_init(); // This will Initialize the LCD
position = Encoder_CLK;// Sotred the CLK position on system init, before the while loop start.
}
lcd 功能寫(xiě)在 lcd. h 庫(kù)上, 其中聲明了 lcd _ put ()、lcd _ cmd ()。
完整代碼:
/*
* File: main.c
* Author: Sourav Gupta
*
* Created on 18 Dec 2018, 18:57
*/
/*
* Configuration Related settings. Specific for microcontroller unit.
*/
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3/PGM pin has PGM function; low-voltage programming enabled)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
#define _XTAL_FREQ 20000000
/*
* System Header files inclusions
*/
#include //#include #include #include "supporting c files/lcd.h" #define Encoder_SW PORTDbits.RD2 #define Encoder_DT PORTDbits.RD3 #define Encoder_CLK PORTCbits.RC4 /* * Program flow related functions */ int counter; // It will hold the count of rotary encoder. int position; // It will store the rotary encoder position. void sw_delayms(unsigned int d); int value[7]; /* * System Init Function */ void system_init (); /* Main function single Thread*/ void main(void) { system_init(); lcd_puts ("Circuit Digest"); lcd_com(0xC0); counter = 0; while(1){ lcd_com(0xC0); if (Encoder_SW == 0){ sw_delayms(20); if (Encoder_SW == 0){ //lcd_com(1); //lcd_com(0xC0); lcd_puts ("switch pressed"); // itoa(counter, value, 10); // lcd_puts(value); } } if (Encoder_CLK != position){ if (Encoder_DT != position){ // lcd_com (0x01); counter++; lcd_com (0xC0); lcd_puts(" "); lcd_com (0xC0); lcd_bcd(1,counter); } else{ // lcd_com (0x01); lcd_com (0xC0); counter--; lcd_puts(" "); lcd_com (0xC0); lcd_bcd(1,counter); //lcd_puts("Left"); } } position = Encoder_CLK; } return; } void sw_delayms(unsigned int d){ int x, y; for(x=0;x for(y=0;y<=1275;y++); } void system_init(){ TRISB = 0x00; // PORT B as output, This port is used for LCD TRISDbits.TRISD2 = 1; TRISDbits.TRISD3 = 1; TRISCbits.TRISC4 = 1; lcd_init(); // This will Initialize the LCD position = Encoder_CLK;// Sotred the CLK position on system init, before the while loop start. }
上一篇:PIC單片機(jī)之定時(shí)器(TMR0)
下一篇:PIC單片機(jī)調(diào)試總結(jié)
推薦閱讀
史海拾趣
背景:近年來(lái),隨著全球?qū)沙掷m(xù)發(fā)展和數(shù)字化轉(zhuǎn)型的重視,霍尼韋爾積極調(diào)整戰(zhàn)略方向。
發(fā)展:公司加大了在可持續(xù)技術(shù)和數(shù)字化轉(zhuǎn)型領(lǐng)域的投入,推出了一系列創(chuàng)新的產(chǎn)品和解決方案。例如,在能源轉(zhuǎn)型領(lǐng)域,霍尼韋爾與多家中國(guó)合作伙伴共同推動(dòng)可持續(xù)航空燃料生產(chǎn)基地的建設(shè);在智慧建筑領(lǐng)域,與騰訊云合作打造聯(lián)合解決方案等。
關(guān)鍵事件:這些舉措不僅體現(xiàn)了霍尼韋爾對(duì)可持續(xù)發(fā)展的承諾和責(zé)任擔(dān)當(dāng),也展示了公司在數(shù)字化轉(zhuǎn)型方面的前瞻性和創(chuàng)新能力。同時(shí),這些合作也進(jìn)一步鞏固了霍尼韋爾在全球電子行業(yè)的領(lǐng)先地位。
作為一家世界領(lǐng)先的傳感器制造商,BALLUFF公司始終堅(jiān)持全球化戰(zhàn)略與本土化發(fā)展的結(jié)合。在全球60多個(gè)國(guó)家設(shè)有代表處,并在38個(gè)國(guó)家擁有銷(xiāo)售、生產(chǎn)和開(kāi)發(fā)的子公司。同時(shí),公司在德國(guó)、美國(guó)、瑞典、巴西、匈牙利、中國(guó)和日本等地建立了自動(dòng)化產(chǎn)業(yè)和能源產(chǎn)業(yè)生產(chǎn)基地。這種全球化布局使得BALLUFF能夠更好地服務(wù)全球客戶,滿足不同地區(qū)的市場(chǎng)需求。同時(shí),公司也注重本土化發(fā)展,通過(guò)深入了解當(dāng)?shù)厥袌?chǎng)和客戶需求,不斷推出符合當(dāng)?shù)厥袌?chǎng)需求的產(chǎn)品和服務(wù)。
這五個(gè)故事展示了BALLUFF公司在電子行業(yè)中的發(fā)展歷程和取得的成就。從初創(chuàng)時(shí)期的機(jī)械修理廠到如今的全球傳感器制造領(lǐng)軍企業(yè),BALLUFF憑借其技術(shù)創(chuàng)新、產(chǎn)品質(zhì)量和市場(chǎng)拓展能力,不斷在電子行業(yè)中取得突破和進(jìn)展。同時(shí),公司也積極適應(yīng)市場(chǎng)變化,不斷調(diào)整戰(zhàn)略和業(yè)務(wù)模式,以適應(yīng)全球化趨勢(shì)和客戶需求的變化。
Advanced Detector Corp公司成立于上世紀(jì)80年代,由一群熱衷于探測(cè)器技術(shù)研發(fā)的科學(xué)家和工程師創(chuàng)立。在創(chuàng)立初期,ADC便專(zhuān)注于開(kāi)發(fā)高精度、高靈敏度的探測(cè)器技術(shù),以滿足當(dāng)時(shí)日益增長(zhǎng)的電子測(cè)量需求。公司通過(guò)持續(xù)的技術(shù)創(chuàng)新,逐漸在探測(cè)器領(lǐng)域取得了突破性的進(jìn)展,并成功推出了一系列具有競(jìng)爭(zhēng)力的產(chǎn)品。
面對(duì)市場(chǎng)的多元化需求,HVPSI不斷擴(kuò)展其產(chǎn)品線,從最初的高壓電源模塊拓展到高壓直流電源、高壓脈沖電源等多個(gè)領(lǐng)域。公司還投入大量資源研發(fā)新型材料和技術(shù),以提升產(chǎn)品的性能和可靠性。這些努力使得HVPSI能夠提供全方位的高壓電源解決方案,滿足不同行業(yè)、不同應(yīng)用場(chǎng)景的需求。
為了進(jìn)一步擴(kuò)大在電子行業(yè)的市場(chǎng)份額,HEICO Corporation采取了積極的并購(gòu)策略。例如,在2022年,公司宣布收購(gòu)Accurate Metal Machining, Inc. 96%的股份,這是一家位于克利夫蘭的高可靠性組件制造商。此次收購(gòu)為HEICO帶來(lái)了新產(chǎn)品和功能,增強(qiáng)了其在航空航天和國(guó)防領(lǐng)域的競(jìng)爭(zhēng)力。通過(guò)并購(gòu),HEICO不僅獲得了先進(jìn)的技術(shù)和人才,還拓寬了產(chǎn)品線,加速了其在電子行業(yè)的擴(kuò)張步伐。
HEICO Corporation在電子技術(shù)領(lǐng)域的成功離不開(kāi)其對(duì)技術(shù)創(chuàng)新的重視。公司不斷推出新產(chǎn)品,如大功率電容器充電電源、行波管放大器、光電探測(cè)器等,這些產(chǎn)品以其卓越的性能和可靠性贏得了市場(chǎng)的廣泛認(rèn)可。同時(shí),HEICO還致力于提升生產(chǎn)效率和產(chǎn)品質(zhì)量,通過(guò)引入先進(jìn)的生產(chǎn)設(shè)備和工藝,確保產(chǎn)品能夠按時(shí)交付并滿足客戶的嚴(yán)格要求。這種技術(shù)創(chuàng)新和品質(zhì)保證的策略,使得HEICO在電子行業(yè)中保持了領(lǐng)先地位。
|
求助,關(guān)于MAX1898的應(yīng)用電路的問(wèn)題 有兩種電路,圖一我用面包板實(shí)驗(yàn)了,好使,但是圖二加了光耦后,典型電路的LED指示燈就不亮了. 此電路圖1用的是PDF上的經(jīng)典電路,基本原理就是單片機(jī)連接CHG,CHG發(fā)出充滿信息后單片機(jī)控制EN口停止充電,圖二的原理CHG是一樣的,不同的是利用光耦控制停止 ...… 查看全部問(wèn)答∨ |
|
|
我們公司剛開(kāi)發(fā)完一款嵌入式瀏覽器,要發(fā)布,現(xiàn)在讓公司每個(gè)人取三個(gè)名字,思來(lái)想去,也沒(méi)想出什么好名字,我知道網(wǎng)絡(luò)上有很多非常有才華的人,所以現(xiàn)在在網(wǎng)上發(fā)一下,集思廣益!謝謝!… 查看全部問(wèn)答∨ |
|
|
專(zhuān)業(yè)經(jīng)驗(yàn)要求: · 5年以上編程工作經(jīng)驗(yàn) 3年以上C++ 編程經(jīng)驗(yàn) · 1年以上WinCe的經(jīng)驗(yàn) (熟悉Linux系統(tǒng)/handheld手持更好); · & ...… 查看全部問(wèn)答∨ |
micro2440跑wince6.0,用(images\\wince6提供的)下的nboot_A70.bin,和NK_A70.bin,能跑 然后用(images\\wince6提供的)下的nboot_A70.bin,再用自己編譯的提供的mini2440的BSP生成的nk.bin(D:\\WINCE600\\OSDesigns\\Mini2440\\Mini2440\\RelDi ...… 查看全部問(wèn)答∨ |
|
windows 編程 關(guān)于無(wú)線上網(wǎng) 端口號(hào)的 問(wèn)題? 我們現(xiàn)在需要建立一個(gè) 100個(gè)節(jié)點(diǎn)的無(wú)線網(wǎng)絡(luò), 這 100 個(gè)節(jié)點(diǎn)中有97個(gè)是現(xiàn)場(chǎng)的 無(wú)線數(shù)據(jù)模塊,通過(guò)手機(jī)卡實(shí)現(xiàn) 無(wú)線上網(wǎng),3個(gè)節(jié)點(diǎn) 是數(shù)據(jù)中心,分別接有一臺(tái) PC機(jī)(此PC機(jī)為固定IP), 然后 這97個(gè) 無(wú)線模塊 分別 向一臺(tái) PC機(jī)發(fā)送數(shù)據(jù). ...… 查看全部問(wèn)答∨ |
關(guān)于windows mobile驅(qū)動(dòng) 我是做windows mobile應(yīng)用開(kāi)發(fā)的,對(duì)驅(qū)動(dòng)程序不是很了解。想問(wèn)問(wèn)關(guān)于驅(qū)動(dòng)的問(wèn)題。 在網(wǎng)上看了下關(guān)于流驅(qū)動(dòng)的介紹,想寫(xiě)一個(gè)驅(qū)動(dòng)在ppc手機(jī)開(kāi)機(jī)的時(shí)候自動(dòng)被加載。 我按照介紹用vs2008,WM5.0 SDK寫(xiě)了一個(gè)dll,實(shí)現(xiàn)了下面幾個(gè)函數(shù): DWORD TTT_Ini ...… 查看全部問(wèn)答∨ |
|
printf(\"bef1 temp:x%x humi:x%x \\n\",temp_val.i,humi_val.i); humi_val.f=(float)humi_val.i; &nb ...… 查看全部問(wèn)答∨ |
我改動(dòng)了RTC中的內(nèi)容系統(tǒng)就起不來(lái)了? 我目前用的是6410+wince6的平臺(tái),我改動(dòng)了RTC中的內(nèi)容,之前用的是CPU的RTC,目前我們加了一個(gè)外部的RTC,我通過(guò)iic對(duì)它進(jìn)行讀和寫(xiě)。 問(wèn)題1:如果采用我在驅(qū)動(dòng)中的iic驅(qū)動(dòng),通過(guò)deviceiocontrol的時(shí)候單獨(dú)編譯RTC的時(shí)候可以編譯的過(guò)去。但是如果使用 ...… 查看全部問(wèn)答∨ |

設(shè)計(jì)資源 培訓(xùn) 開(kāi)發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過(guò)Hub連接U盤(pán)讀寫(xiě)不穩(wěn)定問(wèn)題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問(wèn)題解析








 HLMP-1420-QL000
HLMP-1420-QL000- 瞄準(zhǔn)車(chē)規(guī)級(jí)碳化硅,理想發(fā)表重要成果
- 車(chē)規(guī)級(jí)MCU國(guó)內(nèi)替代提速
- 博世新獲國(guó)內(nèi)頭部車(chē)企座艙域控項(xiàng)目定點(diǎn)
- 首款測(cè)量電動(dòng)汽車(chē)電機(jī)溫度的傳感器問(wèn)世,提升對(duì)磁鐵的保護(hù)以減少稀土的使用
- Arm開(kāi)發(fā)出計(jì)算子系統(tǒng) 以加速汽車(chē)設(shè)計(jì)的下一代AI芯片的開(kāi)發(fā)
- 福特汽車(chē)申請(qǐng)新專(zhuān)利 或?qū)崿F(xiàn)車(chē)庫(kù)定向音樂(lè)播放
- 泊車(chē)場(chǎng)景一定需要超聲波嗎?
- 同星新一代TC1055 Pro開(kāi)啟車(chē)載網(wǎng)絡(luò)測(cè)試新時(shí)代
- 福特汽車(chē)申請(qǐng)新專(zhuān)利 或?qū)⑴鋫浒踩ㄗ粉櫹到y(tǒng)
- 蘇黎世聯(lián)邦理工學(xué)院開(kāi)發(fā)四足機(jī)器人 可與人類(lèi)對(duì)打羽毛球
- 找小伙伴們一起去闖 STM32 F7英雄聯(lián)盟設(shè)計(jì)大賽
- 有獎(jiǎng)直播:8月21上午10:00 泰克助您應(yīng)對(duì)現(xiàn)在及未來(lái)的測(cè)試挑戰(zhàn)!
- 捉蟲(chóng)行動(dòng)二:爭(zhēng)做EE下載中心黑貓警長(zhǎng)!
- 有獎(jiǎng)活動(dòng)“庖丁”解智能睡眠監(jiān)測(cè)儀,一波“水軍”來(lái)圍觀
- 西門(mén)子精彩視頻限時(shí)免費(fèi)|利用電子產(chǎn)品生命周期管理 (PLM) 更快地交付更多產(chǎn)品
- TI 中國(guó)大學(xué)計(jì)劃20周年官網(wǎng)“幸運(yùn)雨”了,你還不來(lái)?yè)專(zhuān)?/a>
- 解鎖 TE 掌上信息智庫(kù),獲取一站式資源!
- Microchip有獎(jiǎng)直播:如何充分利用零漂移運(yùn)算放大器
- 恩智浦開(kāi)發(fā)板交流火熱進(jìn)行中
- “很?chē)樔说募夹g(shù)”GPU Turbo率先為榮耀Play加持,6月11日開(kāi)售
- 臺(tái)灣首屆IGBS綠建筑峰會(huì) 臺(tái)達(dá)分享節(jié)能方案及推動(dòng)實(shí)務(wù)
- 為預(yù)防碰撞 Foresight推Eye-Net V2X事故預(yù)防方案
- 智慧校園選擇臺(tái)達(dá)微模塊數(shù)據(jù)中心打造核心機(jī)房
- 豐田聯(lián)合TomTom推導(dǎo)航app 可離線導(dǎo)航
- 榮耀 Play4 Pro 預(yù)售:麒麟 990/40W 超級(jí)快充
- 蘋(píng)果讓被搶iPhone遠(yuǎn)程變磚 美網(wǎng)友:把Wi-Fi斷了
- 首發(fā)90W快充 聯(lián)想拯救者電競(jìng)手機(jī):驍龍865/8G內(nèi)存
- Android 11特性調(diào)整:安裝外部來(lái)源應(yīng)用需重啟APP
- 諾基亞研發(fā)的液冷5G技術(shù)降低運(yùn)營(yíng)商的二氧化碳排放量
- 請(qǐng)教高手lm324電路分析
- 賣(mài)板子,掙錢(qián)買(mǎi)房子.
- TI將藍(lán)牙解決方案與MSP430單片機(jī)結(jié)合
- TDPUDPdebug 以太網(wǎng)調(diào)試工具
- 哪位老總能組織一次高端的DIY活動(dòng)《腦電波芯片》
- 大家碰到過(guò)wince exfat的bug嗎
- 共享TI 工程師制作的MSP430仿真器EZFET DIY設(shè)計(jì)
- 關(guān)于F28335的DSP/BIOS移植問(wèn)題
- 平板電腦RK3288主控平臺(tái)+2顆 LPDDR2(168ball)的模塊設(shè)計(jì)
- 聲光控樓道報(bào)時(shí)器







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)