



本節(jié)針對的是ARM2200環(huán)境下編寫串口程序,其中設(shè)計(jì)輪循方式,中斷方式,以及在UC/OS-II操作系統(tǒng)下的串口編程。使用輪循和中斷兩種方式來實(shí)現(xiàn)串口編程。用中斷實(shí)現(xiàn)串口編程,系統(tǒng)的效率較高,但是難度也較大 ;輪循方式效率較低,但是編程比較簡單。
一.串口編程的硬件原理
1. 串口特性:
1>16字節(jié)接收FIFO和16字節(jié)發(fā)送FIFO
2>接收FIFO觸發(fā)點(diǎn)可設(shè)置為1,4,8或14字節(jié)。
3>內(nèi)置波特率發(fā)生器。
2. UART0引腳:
1>RxD0 引腳用于UART0接受數(shù)據(jù),接受方式為串行輸入。
2>TxD0引腳用于UART0發(fā)送數(shù)據(jù),發(fā)送方式為串行發(fā)送數(shù)據(jù)。
3. UART0的結(jié)構(gòu)和工作方式
先看圖在說明:
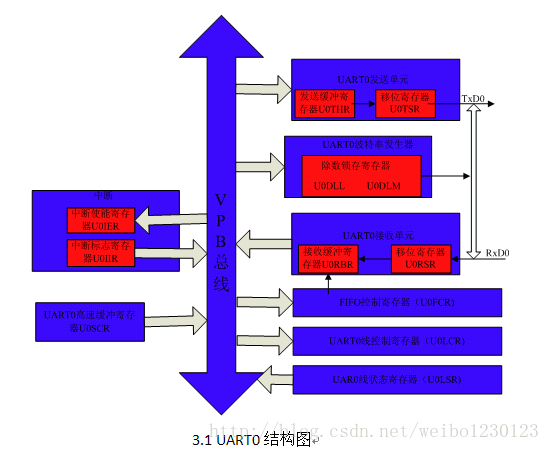
1> VPB總線提供CPU與UART0之間得的通信連接
(CPU內(nèi)核通過VPB接口對UART0的寄存器進(jìn)行讀寫訪問.)
2> UART0 接收器模塊監(jiān)視串行輸入線RxD0的有效輸入。UART0 接收單元的移位寄存器(U0RSR)通過RxD0接收有效的字符。當(dāng)U0RSR接受到一個(gè)有效字符時(shí),它將該字符傳送到UART0 接收單元緩沖寄存器FIFO中,等待CPU通過VPB接口進(jìn)行訪問。
3> UART0發(fā)送器模塊接收CPU或主機(jī)寫入的數(shù)據(jù)并將數(shù)據(jù)緩存到UART0 的FIFO或U0THR中,UART0發(fā)送模塊中的移位寄存器(U0TSR)讀取U0THR或FIFO中的數(shù)據(jù)并將數(shù)據(jù)通過串行輸出到引腳TxD0發(fā)送。
4> UART0的接收模塊和發(fā)送模塊的狀態(tài)信息保存在U0LSR中。
控制信息保存在U0LCR中。
5> UART0波特率發(fā)送器模塊產(chǎn)生UART0 發(fā)送模塊所使用的定時(shí)。波特率發(fā)生器模塊時(shí)鐘源為VPB時(shí)鐘(pclk)。主時(shí)鐘與U0DLL和U0DLM寄存器所定義的除數(shù)相除得到UART0 發(fā)送器模塊使用的時(shí)鐘,該時(shí)鐘必須為波特率的16倍。
6> 中斷接口包含寄存器U0IER和U0IIR。中斷接口接收UART0發(fā)送模塊和接收模塊發(fā)出的單時(shí)鐘寬度的使能信號。
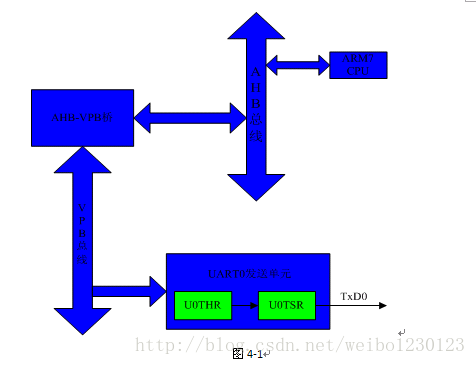
4. UART0和ARM7 CPU之間的通信過程
1>CPU通過UART0發(fā)送模塊發(fā)送信息給外設(shè)
第一:CPU發(fā)出信息通過AHB總線到AHB-VPB橋
第二:通過AHB-VPB橋把信息轉(zhuǎn)換后發(fā)送給VPB總線。
第三:UART0接收模塊接受來自VPB總線的數(shù)據(jù)。并將數(shù)據(jù)緩存到U0THR寄存器中。
第四:UART0接受模塊的移位寄存器U0TSR讀取U0THR中的數(shù)據(jù) 并將數(shù)據(jù)通過輸出引腳TxD0發(fā)送。
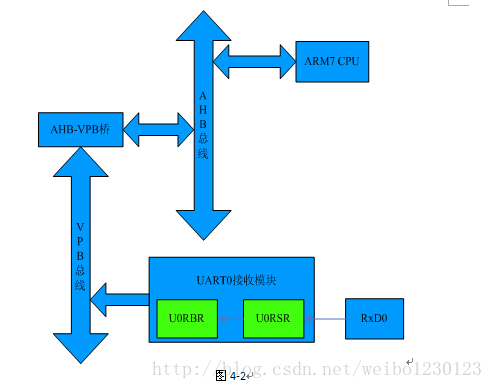
2>外設(shè)通過UART0接收模塊向ARM7 CPU發(fā)送信息
第一:UART0移位寄存器(U0RSR)通過引腳RxD0接收有效字符。
第二:當(dāng)UART0接收到一個(gè)有效字符后,通過讀取U0RBR寄存器可以將FIFO中最早接收到的字節(jié)讀出,當(dāng)FIFO中不再包含有效數(shù)據(jù)時(shí),該寄存器反映接收到的最后一個(gè)有效字節(jié)數(shù)據(jù)。接收的數(shù)據(jù)不足8位時(shí),高位用0填充。
第三:VPB總線將緩沖寄存器(U0RBR)中的數(shù)據(jù)通過AHB-VPB橋傳到AHB總線上
第四:AHB總線將數(shù)據(jù)傳送給ARM7 CPU。
二.輪訓(xùn)方式的串口編程
1. 串口程序都有那幾部分組成如下圖:
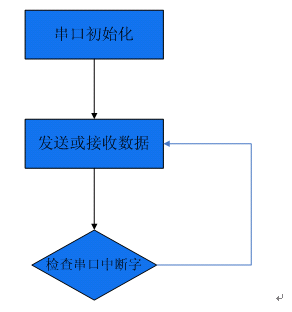
1> 串口初速化
A. 串口初始化的流程
第一:設(shè)置I/O引腳連接到UART0
第二:設(shè)置串口波特率
第三:設(shè)置串口工作模式
B. 串口初始化需要設(shè)置的寄存器
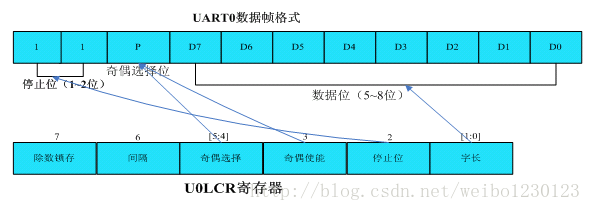
第一:U0LCR(控制寄存器):設(shè)置UART0的通信格式。
第二:U0DLL,U0DLM(寄存器):設(shè)置UART0的通信波特率。
C. 具體寄存器的設(shè)置
(1) U0LCR(線控制寄存器)
第一:作用:設(shè)置通信格式(通信字符長度,停止位個(gè)數(shù),奇偶校驗(yàn)位
第二:長度:8位寄存器
第三:各位寄存器的含義:
第[1 ,0]位: 表示字長
00:表示5位字長
01:表示6位字符長度
10:表示7位字符長度
11:表示8位字符長度
第2位: 表示停止位選擇
0:1個(gè)停止位
1:2個(gè)停止位
3位:表示奇偶使能
0:禁止奇偶產(chǎn)生和校驗(yàn)
1:使能奇偶產(chǎn)生和校驗(yàn)
注:奇偶使能:控制是否進(jìn)行奇偶校驗(yàn)。如果使能,發(fā)送時(shí)將添加一位校驗(yàn)位。
第[5 4]位:表示奇偶選擇位
00:奇數(shù)(數(shù)據(jù)位+校驗(yàn)位=奇數(shù))
01:偶數(shù)(數(shù)據(jù)位+校驗(yàn)位=偶數(shù))
10:校驗(yàn)位強(qiáng)制為1
11:校驗(yàn)位強(qiáng)制為0
注:奇偶選擇主要是設(shè)置奇偶校驗(yàn)類型。
第6位:間隔控制
0:禁止間隔發(fā)送
1:使能間隔發(fā)送
注:當(dāng)該位為1時(shí),輸出引腳(TxD0)強(qiáng)制為邏輯0,可以引起通信對方產(chǎn)生間隔中斷。在一些通信方式中,使用間隔中斷作為通信的起始信號(eg:LIN Bus)
第7位:除數(shù)鎖存訪問位
0:禁止訪問除數(shù)鎖存寄存器
1:始能訪問除數(shù)鎖存寄存器
(2) U0DLL,U0DLM(除數(shù)鎖存寄存器)
第一:作用:U0DLL和U0DLM寄存器一起構(gòu)成一個(gè)16位除數(shù)。
第三:U0DLL和U0DLM都為8位寄存器。
第四:U0DLL:存放分頻值的低8位
第五:U0DLM:存放分頻值的高8位。
注意:
(1)使用U0DLL和U0DLM配置波特率之前,必須先計(jì)算分頻值。
Fdiv=Fpclk/(16*baud)
(2)使用U0DLL和U0DLM配置波特率之前必須把U0LCR控制寄存器的第8位置為1才能進(jìn)行配置。配置完后要把U0LCR控制寄存器的第8位置位0。
2.串口接收數(shù)據(jù)
用輪循方式接收數(shù)據(jù)
1>CPU通過串口接收數(shù)據(jù)時(shí)各個(gè)寄存器之間的關(guān)系
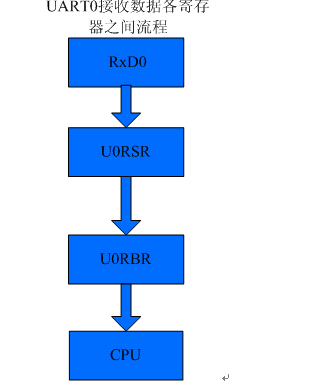
2>串口接受數(shù)據(jù)的流程:
第一:循環(huán)檢測U0RBR是否有未讀取的數(shù)據(jù)。
第二:如果有數(shù)據(jù)到來,則接收數(shù)據(jù)。
3>相關(guān)寄存器配置
(1) U0LSR(線狀態(tài)寄存器)
第一:作用,只讀寄存器,它提供UART0發(fā)送和接收模塊的狀態(tài)信息。
第二:長度:8位寄存器。
第三:各位寄存器的含義:
A.0位:表示接收數(shù)據(jù)就緒
置0表示U0RBR為空
置1表示U0RBR包含有效數(shù)據(jù)
注:當(dāng)U0RBR包含未讀的字符時(shí),第0位被置位;當(dāng)UART0的U0RBR或FIFO為空時(shí),第0位置零。
B.第1位:溢出錯(cuò)誤。
置0:溢出錯(cuò)誤狀態(tài)未激活
置1:溢出錯(cuò)誤狀態(tài)激活
注:溢出錯(cuò)誤條件在錯(cuò)誤發(fā)生后立即設(shè)置。對U0LSR讀操作將清零第1位。當(dāng)UART0的RSR已經(jīng)有新的字符就緒,而UART0 RBR或FIFO已滿時(shí),第一位置1.此時(shí)的UART0 RBR或FIFO不會被覆蓋,UART0 的RSR中的字符將丟失。
C.第2位:奇偶錯(cuò)誤。
置0:奇偶錯(cuò)誤狀態(tài)未激活
置1:奇偶錯(cuò)誤狀態(tài)激活
注:當(dāng)接收字符的奇偶位處于錯(cuò)誤狀態(tài)時(shí)產(chǎn)生一個(gè)奇偶錯(cuò)誤。對U0LSR讀操作清零該位。奇偶錯(cuò)誤檢測時(shí)間取決于U0FCR的bit0。奇偶錯(cuò)誤與UART0 的RBR,F(xiàn)IFO中讀出的字符相關(guān)。
D.第3位:幀錯(cuò)誤
置0:幀錯(cuò)誤狀態(tài)未激活。
置1:幀錯(cuò)誤狀態(tài)激活
注: 當(dāng)接收字符的停止位為0時(shí),產(chǎn)生幀錯(cuò)誤。對讀操作U0LSR清零該位。幀錯(cuò)誤檢測時(shí)間取決于U0FCR的bit0。幀錯(cuò)誤與UART0的RBR,F(xiàn)IFO中讀出的字符相關(guān)。當(dāng)檢測到一個(gè)幀錯(cuò)誤時(shí),Rx將嘗試與數(shù)據(jù)重新同步并假設(shè)錯(cuò)誤的停止位實(shí)際是一個(gè)超前的起始位。但即使沒有出現(xiàn)幀錯(cuò)誤,它也不能假設(shè)下一個(gè)接收到的字節(jié)是正確的。
E.第四位:間隔中斷
置0:間隔中斷狀態(tài)未激活
置1:間隔中斷狀態(tài)狀態(tài)激活
注: 在發(fā)送整個(gè)字符(起始位,數(shù)據(jù),奇偶位和停止位)過程中RXD0如果都保持邏輯0,則產(chǎn)生間隔中斷。當(dāng)檢測到中斷條件時(shí),接收器立即進(jìn)入空閑狀態(tài)直到RXD0變?yōu)槿?狀態(tài)。讀操作U0LSR清零該狀態(tài)位。 間隔檢測的時(shí)間取決于U0FCR的bit0。間隔中斷與UART0的RBR或FIFO中讀出的字符相關(guān)。
F.第五位:發(fā)送保持寄存器空
置0:表示U0THR包含有效數(shù)據(jù)
置1:表示U0THR空
注:當(dāng)檢測到UART0 的THR空時(shí),THRE置位。對U0THR寫操作清零該位。
G.第6位:表示發(fā)送器空
置0:U0THR和或U0TSR包含有效數(shù)據(jù)。
置1:U0THR和U0TSR空
注:當(dāng)U0THR和U0TSR都為空時(shí),該位置1,當(dāng)U0TSR或U0THR包含有效數(shù)據(jù)時(shí),該位清零。
H第7位:表示Rx FIFO 錯(cuò)誤。
置0:U0RBR中沒有UART0 Rx錯(cuò)誤,或U0FCR的bit為0.
置1:U0RBR包含至少一個(gè)UART0 Rx錯(cuò)誤。
注: 當(dāng)一個(gè)帶有Rx錯(cuò)誤(例如幀錯(cuò)誤,奇偶錯(cuò)誤或間隔中斷)的字符裝入U(xiǎn)0RBR時(shí),該位置1。 當(dāng)讀取U0LSR寄存器并且UART0的FIFO中不再有錯(cuò)誤時(shí),該位置零。
(2) U0RBR(接收器緩沖寄存器)
第一:作用,只讀寄存器,是UART0 Rx FIFO的最高字節(jié)。它包含了最早接收到的字符,可通過總線接口讀出。串口接收數(shù)據(jù)時(shí)低位在先,即U0RBR的bit0為最早接收到的數(shù)據(jù)位。如果接收到的數(shù)據(jù)小于8位,未使用的MSB填充為0.
第二:長度:8位寄存器。
3.串口發(fā)送數(shù)據(jù)
1> 用CPU通過串口發(fā)送數(shù)據(jù)時(shí),各寄存器之間的關(guān)系
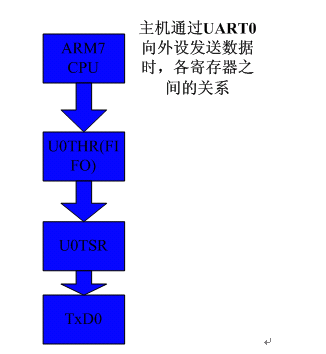
2> 串口發(fā)送數(shù)據(jù)時(shí)的流程
第一:將要發(fā)送的一字節(jié)數(shù)據(jù)寫入U(xiǎn)0THR
第二:等待數(shù)據(jù)發(fā)送完畢
3> 相關(guān)寄存器配置
(1)U0THR(發(fā)送保持寄存器)
第一:最用:只寫寄存器。U0THR是UART0 Tx FIFO的最高字節(jié)。它包含了Tx FIFO 中最新的字符,可通過總線接口寫入。串口發(fā)送數(shù)據(jù)時(shí),低位在先,bit0代表最先發(fā)送的位。
長度:8位寄存器
(2)U0LSR(線狀態(tài)寄存器)
在上面已經(jīng)介紹,在此步再涉及。
4.下面是完整的程序:用輪訓(xùn)方式實(shí)現(xiàn)接收上位機(jī)數(shù)據(jù),并把數(shù)據(jù)再發(fā)送給上位機(jī)。
(通過上位機(jī)給串口發(fā)送8字節(jié)數(shù)據(jù),ARM2200接收到串口數(shù)據(jù)后,把數(shù)據(jù)又發(fā)送回上位機(jī))
/******************************************************************************
** Modified by: TIGER0-JOHN
** Modified date: 2011-1-21
** Version: 1.1
** Descriptions: 測試成功 ,在上面上發(fā)送16進(jìn)制數(shù)時(shí),每個(gè)之間用空格隔開
不加前綴
****************************************************************************/
#include "config.h"
/****************************************************************************
* 名 稱: DelayNS()
* 功 能: 長軟件延時(shí)
* 入口參數(shù): dly 延時(shí)參數(shù),值越大,延時(shí)越久
* 出口參數(shù): 無
****************************************************************************/
void DelayNS(uint32 dly)
{
uint32 i;
for(; dly>0; dly--)
{
for(i=0; i<5000; i++);
}
}
/**********************************************************
* 名稱: UART0_Init()
* 功能: UART0初始化(通訊波特率115200,8位數(shù)據(jù)位,
1位停止位,無奇偶校驗(yàn))
* 入口參數(shù): bps 串口波特率
* 出口參數(shù): 無
**********************************************************/
void UART0_Init(uint32 bps)
{
uint16 Fdiv;
PINSEL0 = 0x00000005; //設(shè)置串口引腳
U0LCR = 0x83; //置為除數(shù)鎖存位,進(jìn)行配置
Fdiv = (Fpclk >> 4) / bps; // 設(shè)置波特率
U0DLM = Fdiv >> 8;
U0DLL = Fdiv & 0xff;
U0LCR = 0x03; //清除除數(shù)鎖存位,并設(shè)置工作模式
}
/**********************************************************
* 名 稱: UART0_RcvByte
* 功 能: 用查詢方式接收一字節(jié)的數(shù)據(jù)
* 入口參數(shù): 無
* 出口參數(shù): data 要接收的數(shù)據(jù)
**********************************************************/
uint8 UART0_RcvByte(void)
{
uint8 rcv_data ;
while((U0LSR&0X01)==0); //等待數(shù)據(jù)到達(dá)
rcv_data = U0RBR; //從U0RBR中讀出接收到的數(shù)據(jù)
return rcv_data; //返回接收到的數(shù)據(jù)
}
/**********************************************************
* 名 稱: UART0_SendByte
* 功 能: 向串口發(fā)送字節(jié)數(shù)據(jù),并等待發(fā)送完畢。
* 入口參數(shù): data 要發(fā)送的數(shù)據(jù)
* 出口參數(shù): 無
**********************************************************/
void UART0_SendByte(uint8 data)
{
U0THR = data;
while(0 == (U0LSR & 0x40));
}
/**********************************************************
* 名稱: UART0_RecBuf()
* 功能: 接收串口發(fā)送過來的幀數(shù)據(jù),
* 入口參數(shù): *buffer 存放一幀數(shù)據(jù)
* 出口參數(shù): 無
**********************************************************/
void UART0_RecBuf (uint8 *buffer)
{
uint8 *pbuffer;
uint8 i;
for(pbuffer = buffer, i = 0;i < 8; i++)
{
*(pbuffer++) = UART0_RcvByte();
}
}
/**********************************************************
* 名稱: UART0_SendBuf()
* 功能: 通過串口發(fā)送一幀數(shù)據(jù)
* 入口參數(shù): *buffer 存放一幀數(shù)據(jù)
* 出口參數(shù): 無
**********************************************************/
void UART0_SendBuf(uint8 *buffer)
{
uint8 *pbuffer;
uint8 i;
for(pbuffer = buffer,i=0;i < 8; i++)
UART0_SendByte(*(pbuffer++));
}
int main (void)
{
uint8 recver_buffer[8]; //定義接收幀緩沖區(qū)
uint8 send_buffer[8] ={0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27}; //定義發(fā)送幀緩沖區(qū)
UART0_Init(115200);
while(1)
{
UART0_RecBuf(recver_buffer);
DelayNS(10);
if(0x10 ==recver_buffer[0] && 0x11 == recver_buffer[1])
UART0_SendBuf(recver_buffer);
else
UART0_SendBuf(send_buffer);
}
return 0;
}
上一篇:UART0串口編程(三):中斷方式;用中斷編寫發(fā)送函數(shù)
下一篇: UART0串口編程(一):通信協(xié)議設(shè)計(jì);RS232標(biāo)準(zhǔn)
推薦閱讀
史海拾趣
面對日益激烈的國際競爭,Eastron Corp決定走全球化發(fā)展的道路。公司先后在亞洲、歐洲和北美等地設(shè)立了研發(fā)中心和生產(chǎn)基地,通過本地化生產(chǎn)和研發(fā),快速響應(yīng)市場需求。同時(shí),Eastron還積極尋求與國際知名企業(yè)的合作,共同開發(fā)新技術(shù)和產(chǎn)品,提升了公司的國際競爭力。
面對日益激烈的國際競爭,Eastron Corp決定走全球化發(fā)展的道路。公司先后在亞洲、歐洲和北美等地設(shè)立了研發(fā)中心和生產(chǎn)基地,通過本地化生產(chǎn)和研發(fā),快速響應(yīng)市場需求。同時(shí),Eastron還積極尋求與國際知名企業(yè)的合作,共同開發(fā)新技術(shù)和產(chǎn)品,提升了公司的國際競爭力。
在快速發(fā)展的同時(shí),港源公司始終不忘履行社會責(zé)任。公司秉承綠色環(huán)保、節(jié)能減排的理念,在生產(chǎn)經(jīng)營活動中以預(yù)防為主、全員參與為行動綱領(lǐng),防治污染、節(jié)廢減排。港源公司選用綠色環(huán)保RoHS材料,嚴(yán)格管控生產(chǎn)制造過程,確保生產(chǎn)出的產(chǎn)品符合國際環(huán)保標(biāo)準(zhǔn)。此外,公司還積極參與社會公益活動,為社會和諧發(fā)展貢獻(xiàn)自己的力量。
在競爭激烈的電子行業(yè)中,創(chuàng)新是企業(yè)持續(xù)發(fā)展的關(guān)鍵。ASI深知這一點(diǎn),因此一直致力于技術(shù)創(chuàng)新和產(chǎn)品升級。通過不斷投入研發(fā)資源、引進(jìn)先進(jìn)技術(shù)以及與高校和研究機(jī)構(gòu)的合作,ASI成功推出了一系列具有競爭力的新產(chǎn)品和解決方案。這些創(chuàng)新不僅提升了ASI的市場競爭力,還為其未來的發(fā)展注入了強(qiáng)大的動力。
這些故事展示了ASI Semiconductor, Inc.從創(chuàng)立到發(fā)展成為電子行業(yè)領(lǐng)導(dǎo)者的過程。通過抓住市場機(jī)遇、提升產(chǎn)品質(zhì)量、拓展全球市場、創(chuàng)新技術(shù)和優(yōu)質(zhì)服務(wù),ASI成功地實(shí)現(xiàn)了自身的快速發(fā)展,并在行業(yè)中樹立了良好的聲譽(yù)。
HANBIT Electronics自成立以來,便致力于技術(shù)創(chuàng)新與產(chǎn)品研發(fā)。2005年,公司投入大量資源研發(fā)新一代高性能手機(jī)顯示屏技術(shù),成功推出了具有低能耗、高清晰度和廣視角特性的OLED屏幕。這一創(chuàng)新不僅迅速獲得了市場的認(rèn)可,還使得HANBIT Electronics在手機(jī)零部件供應(yīng)商中脫穎而出,與多家國際知名品牌建立了長期合作關(guān)系。該技術(shù)的成功不僅提升了公司的市場份額,也為其后續(xù)在高端顯示技術(shù)領(lǐng)域的持續(xù)探索奠定了堅(jiān)實(shí)基礎(chǔ)。
隨著全球?qū)Νh(huán)保問題的日益關(guān)注,HANBIT Electronics積極響應(yīng),將綠色生產(chǎn)納入公司發(fā)展戰(zhàn)略。2020年,公司投資建立了綠色生產(chǎn)線,采用環(huán)保材料和清潔能源進(jìn)行生產(chǎn),實(shí)現(xiàn)了生產(chǎn)過程中的節(jié)能減排。同時(shí),公司還推出了多款環(huán)保型電子產(chǎn)品,滿足消費(fèi)者對綠色、低碳生活的需求。這一舉措不僅提升了公司的品牌形象,也為其在可持續(xù)發(fā)展的道路上贏得了更多機(jī)遇。
|
萬用表實(shí)用技巧(入門必看) 一、指針表和數(shù)字表的選用: 1、指針表讀取精度較差,但指針擺動的過程比較直觀,其擺動速度幅度有時(shí)也能比較客觀地反映了被測量的大小(比如測電視機(jī)數(shù)據(jù)總線(SDL)在傳送數(shù)據(jù)時(shí)的輕微抖動);數(shù)字表讀數(shù)直觀, ...… 查看全部問答∨ |
|
|
小弟準(zhǔn)備測試下網(wǎng)絡(luò)性能,下了Iperf源代碼。要用在ARMV4I wince 6.0平臺上。 但是不知道怎么在VS2005下面編譯 目前bsp的SDK已經(jīng)導(dǎo)出,下一步就不會操作了 哪位老大有成功的經(jīng)驗(yàn),分享下,多謝了!… 查看全部問答∨ |
請教大俠們!怎樣提高Vxworks的計(jì)算速度?用來做大量傅立葉變換 小弟用的Vxwoks5.4 tornado2.02 目標(biāo)機(jī)是 P4 2.4G 512M 現(xiàn)在客戶要求要進(jìn)行運(yùn)算量比較大的傅立葉變換,結(jié)果存在數(shù)組里,要求幾毫秒內(nèi)完成,并完成定時(shí)更新,我編程序計(jì)算了一下,發(fā)現(xiàn)要三百毫秒左右才能完成一次計(jì)算,想要更快點(diǎn),有沒有別的途徑, ...… 查看全部問答∨ |
|
關(guān)于windows mobile授權(quán)問題 想獲取windows mobile的授權(quán),用于開發(fā)Smartphone,有什么要求??比方說硬件方面,比方說相關(guān)技術(shù)積累等,謝謝。 … 查看全部問答∨ |
測試fft變化, 請教各位大俠,如何看fft變化的結(jié)果是否正確!!! for(i=0;i<N;i++) { test = sin((2*3.14159*i)/128); & ...… 查看全部問答∨ |
|
終于申請到TMS320f28015,搜集了一些資料同大家分享。還希望有這方面才能的前輩們多多指點(diǎn),有相關(guān)資料的童鞋們多多上傳資料,共同學(xué)習(xí)進(jìn)步。… 查看全部問答∨ |
|
|
各位大神,我是一個(gè)初學(xué)者,有個(gè)dsp/bios問題請教 bios先在main中初始化,之后是啟動bios_start,進(jìn)入bios,bios啟動后是怎么運(yùn)行的,是先運(yùn)行時(shí)鐘clk,還是硬件中斷什么的,還是先運(yùn)行task,在task中運(yùn)行硬件中斷,軟件中斷… 查看全部問答∨ |
前幾天,我在微博上發(fā)了條消息,想招個(gè)認(rèn)真負(fù)責(zé)、細(xì)心踏實(shí)的實(shí)習(xí)生。可是我收到的簡歷,每個(gè)人都說自己踏實(shí)靠譜,但沒有一個(gè)人投簡歷的時(shí)候愿意在郵件的正文部分寫幾句話,哪怕很不情愿的客套兩句都沒有。不寫就算了,還有人把發(fā)給別人的簡歷直 ...… 查看全部問答∨ |

設(shè)計(jì)資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問題解析

- 人形機(jī)器人馬拉松背后的思考,兆易創(chuàng)新如何賦能機(jī)器人產(chǎn)業(yè)
- 一種基于STM32的智能柜控制器設(shè)計(jì)
- 小型傾轉(zhuǎn)旋翼機(jī)的無刷直流電機(jī)驅(qū)動器設(shè)計(jì)
- 超高速攝影機(jī)電控系統(tǒng)設(shè)計(jì)
- 基于GPS自動授時(shí)的無線智能控制器的設(shè)計(jì)
- 基于PTR2000的無線氣象信息采集系統(tǒng)設(shè)計(jì)
- Microchip推出MEC175xB系列器件,為嵌入式控制器引入硬件 抗量子攻擊能力
- 無人飛行器機(jī)載穩(wěn)定云臺控制系統(tǒng)的設(shè)計(jì)
- 匠芯創(chuàng)推出面向具身智能高性能實(shí)時(shí)處理器M7000







 CB1RSA3715533290653
CB1RSA3715533290653- AI時(shí)代的孩子,如何成為未來的開創(chuàng)者?
- 通用汽車轉(zhuǎn)向LFP電池,LG新能源和三星SDI擬在美建廠
- 蓋世汽車研究院:政策助推疊加技術(shù)迭代 全固態(tài)電池蓄勢待發(fā)
- 小鵬汽車董事長預(yù)測:2027年激光雷達(dá)非智能駕駛必備
- 解碼大眾汽車中國戰(zhàn)略 - 決戰(zhàn)智能化電氣化的三板斧
- 2025從具身智能大腦展望人形機(jī)器人發(fā)展
- “荊楚”人形機(jī)器人即將量產(chǎn),智能時(shí)代的新篇章!
- 小鵬純視覺方案:技術(shù)突圍與市場下沉的雙重博弈
- 為什么無人出租車能“零”事故,而智能駕駛輔助卻事故頻發(fā)?
- 重磅!一顆要顛覆全球智駕的芯片點(diǎn)亮了!
- ADI直播:MEMS技術(shù)與產(chǎn)品解析
- 解鎖【W(wǎng)5500-EVB-Pico】,探秘以太網(wǎng)底層,得捷Follow me第4期來襲!
- 直播已結(jié)束【使用 TI 低成本 MSPM0 MCU 快速開發(fā) – 生態(tài)詳解系列之二】(9:45開始入場)
- 有獎直播|TI 芯技術(shù)助力電機(jī)開發(fā)
- 逛安富利新能源技術(shù)創(chuàng)新云會展 贏好禮!
- 點(diǎn)評Vishay視頻 瘋狂搶樓贏禮進(jìn)行時(shí)!
- Silicon Labs EFM32PG22開發(fā)套件 傳你所思 創(chuàng)你所想!申請進(jìn)行時(shí)!
- 了解TI光影藝術(shù),觀看DLP系列視頻,搶樓贏禮!
- 埃夫特承擔(dān)的兩項(xiàng)國家重點(diǎn)研發(fā)項(xiàng)目啟動會成功召開
- Vishay推出的新款器件,是采用增強(qiáng)封裝的新系列方案
- 聯(lián)想凌拓易捷AI解決方案,加速新基建AI部署步伐
- PC后衰退期的產(chǎn)業(yè)新競爭即將開啟
- 小體積多功能,ADI全新RS485 + 集成隔離式DC-DC轉(zhuǎn)換器問市
- 優(yōu)必選與編程貓合作打造智能教育機(jī)器人Alpha Ebot
- 海格通信簽訂3億元訂單合同,近3月軍工訂單合計(jì)超10.7億元
- 匯頂科技收購海外標(biāo)的布局IoT,大基金將入駐董事會
- 百度投資的Lightelligence要開發(fā)光學(xué)AI芯片
- 比特大陸CEO:去年?duì)I收25億美元超展訊僅次于海思
- Linux操作系統(tǒng)內(nèi)核啟動參數(shù)詳細(xì)解析
- PWM不出波形啊
- wince4.2的操作系統(tǒng)如何修改
- 選擇什么樣的物聯(lián)網(wǎng)卡才靠譜?
- 無線模塊切換信道收發(fā)數(shù)據(jù)
- Linux驅(qū)動學(xué)習(xí) 之觸摸屏驅(qū)動
- 以太網(wǎng)數(shù)據(jù)發(fā)送問題?
- 請大家?guī)蛶兔Γ厴I(yè)設(shè)計(jì),產(chǎn)生一個(gè)5KHz的三角波,階梯波,兩者同步
- 關(guān)于first-chance exception in **.exe access violation的問題
- 【平頭哥RVB2601創(chuàng)意應(yīng)用開發(fā)】初步實(shí)現(xiàn)NTP時(shí)鐘同步的萬年歷功能







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號