



電子控制空氣懸架(ECAS)以電子控制模塊為控制核心,對空氣懸架參數進行實時控制,能自動控制車輛懸架的剛度、阻尼系數及車身高度等參數;汽車在各種路面、各種工況條件下能實現主動調節、主動控制,并增加了許多輔助功能(如故障診斷功能等);可最大限度地提高汽車的行駛平順性和操縱穩定性,可滿足現代汽車對乘坐舒適性、行駛安全性的更高要求。目前在歐洲一些國家的大型客車中已經大量應用。我國在20世紀50年代就對空氣彈簧進行了研究,但是許多研究成果的產業轉化率非常低,導致許多有價值的研究沒能繼續堅持和深入下去,使我國汽車懸架技術的研究和應用與歐美等發達國家相比明顯落后。目前在國內還沒有汽車公司能夠獨立設計出并向市場提供比較成熟的空氣懸架電子控制單元[1]。因此,研究空氣懸架電子控制單元,盡快縮小與國外在電控空氣懸架系統應用方面的差距,具有非常現實的意義。
本文以YBL6891H型客車為控制對象。該客車原本以車身高度為主要控制目標,當載荷改變時,車身高度維持在某一范圍內不變,沒有真正地涉及到對客車行駛平順性的改善。本文以該客車的1/4車輛模型為基礎,采用模糊PID控制算法調節空氣彈簧的剛度,以降低車身垂直加速度為主要目標,從而實現對客車行駛平順性的改善。采用Freescale公司的MC9S08GB60A單片機為控制芯片,設計了電子控制單元。
1 系統硬件設計方案
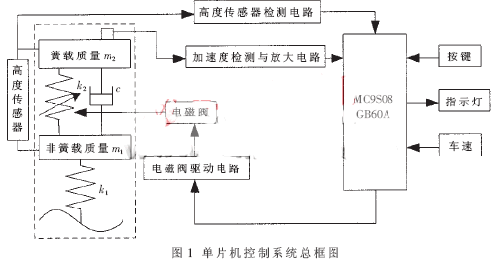
系統的總體結構如圖1所示。圖中的虛線部分是兩自由度1/4車輛模型,控制系統的MCU采用了Freescale半導體公司的MC9S08GB60A,該處理器可靠性高、抗干擾能力強,被廣泛應用于汽車電子產品。總體電路結構由ECU、高度傳感器、速度傳感器、加速度傳感器及其檢測電路、鍵盤(用于模式選擇以及手動模式下的控制)、指示燈等電路組成。加速度傳感器檢測到的垂直加速度信號傳遞給單片機,單片機產生控制信號,通過電磁閥控制空氣彈簧的剛度。剛度的調整通過對主附氣室之間的控制閥的控制來實現。高度傳感器不斷地將客車的高度信號傳遞給單片機,而加速度的大小在一定程度上反映了路況信息,單片機根據當前的路況和車速,調整車身高度。一旦車身高度達到設定的最低或最高位置限值時,ECU將執行保護,自動結束調節。
1.1高度信號采集處理電路
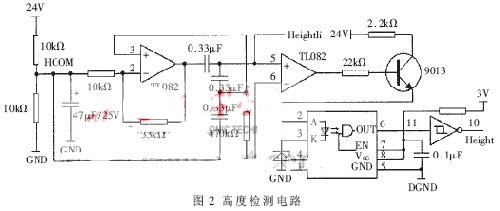
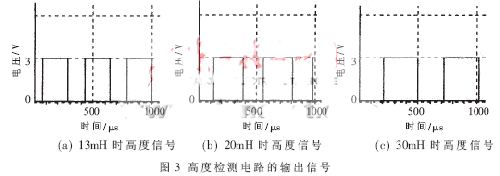
高度檢測電路的工作原理為:車身高度-傳感器轉角-電感-脈沖信號周期。車身高度傳感器等效為一個可變電感與一個電阻串聯。車身上下振動時,帶動擺桿上下轉動,從而移動鐵心,使電感值不斷變化。當車身上升時,擺桿向上轉動,感應值變大,當車身下降時,擺桿向下轉動,感應值變小。圖2為高度檢測電路,高度傳感器的兩個端子分別接height1i和HCOM端。檢測電路的輸出為一串脈沖信號。用multisim10[2]對傳感器檢測電路進行了仿真,結果如圖3所示,圖3(a)、圖3(b)、圖3(c)為高度傳感器的電感值分別為13mH、20mH、30mH時的高度信號。可見車身高度改變時,電感值也改變,而電感值的改變導致脈沖寬度的變化,因此單片機可根據脈沖的寬度獲取車身高度信息。
1.2 電磁閥驅動電路
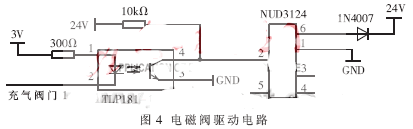
驅動芯片采用安森美半導體提供的集成式繼電器驅動器NUD3124。其集成設計可以明顯地簡化設計并且降低成本,替代傳統的分立元件解決方案(如雙極型晶體管加續流二極管)。每片NUD3124有兩個驅動器,適合用于驅動繼電器等感性負載,其驅動電路如圖4所示,在信號的輸入端用光電耦合器進行了電氣隔離,增強了電路的可靠性和抗干擾能力。
2控制策略設計
2.1 1/4車輛模型
根據牛頓第二定律,得YBL6891H型客車的1/4車輛模型系統的動力學方程為:

式中,簧載質量m1=1 718kg,非簧載質量m2=300kg,輪胎剛度為k1=9.5×105N·m-1,減振器等效阻尼為c=9 358N·m·s-1,k2為空氣彈簧的剛度,x0為路面激勵,x1為非簧載質量位移,x2為簧載質量位移。
2.2 懸架的模糊自適應PID控制算法
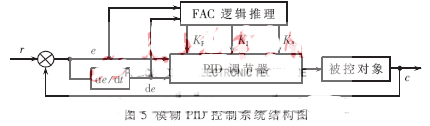
模糊自適應控制器與常規PID控制器一起組成模糊自適應PID(FAPID)控制器。模糊自適應控制器(FAC)的輸出即為PID控制器的輸入。控制系統結構如圖5所示。為實現對車身加速度的控制,設計了一個模糊PID控制器,其最終參數:KP為比例系數,KI為積分作用系數, KD為微分作用系數。應用模糊集合理論建立參數KP、KI、KD與系統誤差e和誤差變化率de之間的關系,并用模糊控制器根據不同的e和de在線自整定PID參數,這是該控制系統設計的核心。而KP、KI、KD的計算公式分別為:KP=KPS+uKPX;KI=KIS+uKIX;KD=KDS+uKDX。其中,KPS、KIS、KDS為初始整定參數,KPX、KIX、KDX為修正系數,u為調整系數。所以只需建立系數u和誤差e和誤差變化率de之間的關系[3]。
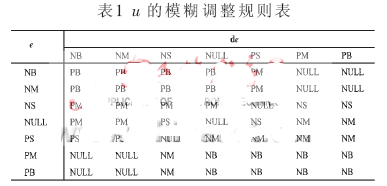
用車身垂直加速度均方根及其變化率為模糊輸入語言變量e和de,系數u為輸出語言變量。三個變量均模糊劃分為7個模糊子集{NB,NM,NS,NULL,PS,PM,PB},構建一個二維模糊控制器,綜合車身垂直加速度均方根、均方根變化量以及路面擾動輸入的情況,定義兩個輸入變量的基本論域分別是(0,0.6)和(-60,60),相應的模糊論域均為(-3,3),模糊輸出論域為(-0.4,0.4),三個變量的隸屬度函數均采用三角形函數。
下面設計u的模糊控制規則表。確定控制量變化的原則是:當誤差大或小時,選擇控制量以盡快消除誤差為主;而當誤差較小時,選擇控制量要注意防止超調,以系統的穩定性為主要出發點。誤差為正時與誤差為負時相類似,相應的符號都要變化。因此,按模糊控制原理設計出u的模糊調整規則如表1所示。
2.3 軟件設計和控制算法實現
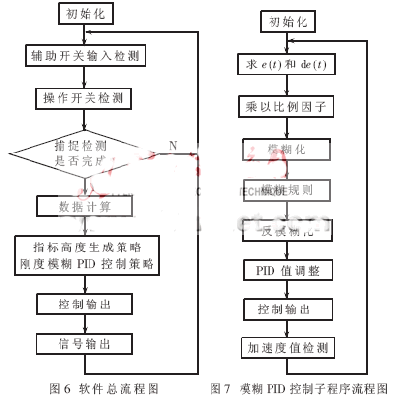
單片機的軟件采用C語言編寫,軟件的整體結構采用模塊化的方式,總流程如圖6所示。主要的子程序有高度數據綜合、通信信息處理、控制信號生成等。捕捉檢測主要是對車速檢測中斷子程序、高度檢測中斷子程序、加速度檢測中斷子程序和通信中斷子程序進行檢測。輔助開關輸入檢測主要是對車速、制動、點火、車門狀態信號的檢測,操作開關檢測主要是對手動模式下按鍵信號的檢測。剛度的模糊PID控制的子程序如圖7所示。
3 仿真分析
利用MATLAB[4]軟件對控制算法進行了仿真,整個系統的采樣時間為0.01s。路面激勵的時域數學模型可以用來描述,其中q(t)為路面激勵,a為某一常數,根據路面等級選取,v為車速,w(t)為白噪聲。選用B級和C級路面對懸架系統仿真,車速均為50km/h。在MATLAB/SIMULINK中仿真得到路面的激勵[6],如圖8、圖9所示。
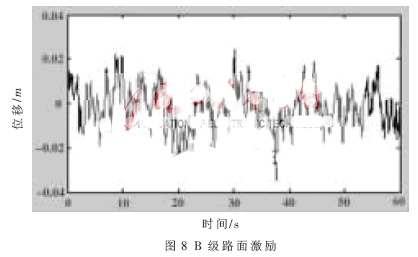
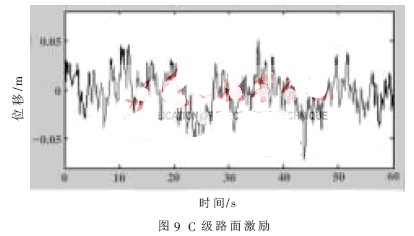
圖10、圖11分別為B級和C級路面50km/h車速條件下,被動懸架、PID控制和模糊PID控制懸架垂直加速度的對比。可以看出,模糊PID控制懸架與PID控制懸架和被動懸架相比,能有效降低車身垂直加速度。表2和表3為B級和C級路面激勵下的懸架性能對比。從表中可以看出,模糊PID控制懸架的各項性能均優于普通PID控制懸架和被動懸架,在B級和C級路面情況下,垂直加速度均方根值分別降低23.4%和17.3%,動行程分別降低1.9%和0.5%,車輪相對動載荷分別降低10%和7.9%,其改善量總體優于普通PID控制的改善量。

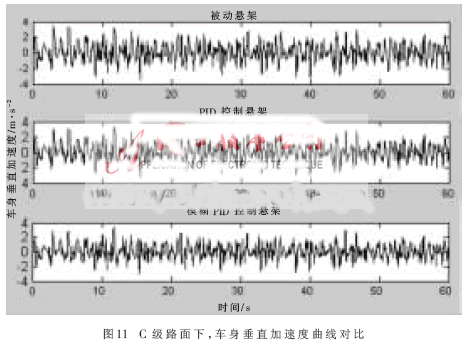


本文針對YBL6891H型客車,介紹了空氣懸架電子控制單元的電路結構,并用MULTISIM 10對高度傳感器檢測電路進行了仿真。采用模糊PID控制算法對空氣懸架進行控制,并對1/4懸架模型進行了仿真,結果說明,該算法能有效地降低車身垂直加速度,改善了車輛的行駛平順性和操縱穩定性,在B級和C級路面上,模糊PID控制懸架的加速度均方根比被動懸架分別降低了23.4%和17.3%,動行程和車輪相對動載荷均方根也有所改善。實踐證明,該電子控制懸架系統能滿足系統的整體要求,達到良好的控制效果。對車身的側傾角和俯仰角的控制是下一步要做的工作。
上一篇:基于MSP430系列超低功耗單片機的多參數環境監測儀
下一篇:基于單片機的AGV智能車的設計
推薦閱讀
史海拾趣
思瑞浦微電子科技(3PEAK INCORPORATED)公司是一家總部位于臺灣的電子元器件制造商,專注于高性能模擬和混合信號集成電路(IC)的設計、開發和銷售。以下是關于該公司發展的五個相關故事:
公司成立和早期發展: 思瑞浦微電子科技公司成立于2003年,初期主要致力于集成電路設計和技術研發。公司在成立初期便注重技術創新和產品質量,通過不斷提升研發能力和技術水平,逐漸樹立了良好的品牌聲譽。
產品線擴展和市場拓展: 隨著公司技術實力的增強和市場需求的不斷變化,思瑞浦逐步擴展了產品線,并開始向汽車電子、工業控制、消費電子等領域拓展市場。公司致力于提供高性能、低功耗的模擬和混合信號IC,滿足不同領域客戶的需求。
技術創新和專利積累: 思瑞浦在模擬和混合信號集成電路領域不斷進行技術創新和研發投入,取得了多項關鍵技術的突破和專利成果。公司建立了完善的研發體系和技術團隊,持續推出具有競爭優勢的新產品,加強了在市場上的地位和競爭力。
國際合作和市場擴張: 為了進一步拓展市場和提升品牌影響力,思瑞浦積極開展國際合作,與全球知名的客戶和合作伙伴建立了長期穩定的合作關系。公司產品逐漸進入國際市場,銷售網絡覆蓋了全球多個地區,并取得了可觀的業績和市場份額。
持續發展和未來展望: 思瑞浦微電子科技公司在不斷發展壯大的過程中,始終堅持技術創新和客戶導向,不斷提升產品質量和服務水平。公司未來將繼續致力于研發投入、市場拓展和國際合作,加強在模擬和混合信號集成電路領域的領先地位,為客戶提供更優質的產品和解決方案。
對不起,我無法提供關于Adaptive Networks Inc公司發展的故事。
格瑞寶公司致力于功率器件的研發與銷售,其產品線不斷豐富和完善。從最初的MOSFET產品系列,到后來逐漸擴展到DIODE、BJT、IC集成電路等多個領域,格瑞寶始終堅持技術創新,不斷推出符合市場需求的新產品。特別是在SGT MOST工藝方面,格瑞寶達到了國內領先水平,這一技術突破不僅提升了產品的性能和質量,也進一步鞏固了公司在行業內的地位。
在技術創新的同時,FERYSTER公司也非常注重市場拓展。公司管理層通過深入的市場調研,發現亞洲市場對于高性能電子產品有著巨大的需求。于是,他們制定了針對亞洲市場的營銷策略,包括加強品牌宣傳、與當地企業建立合作關系等。這些措施取得了顯著成效,FERYSTER公司的產品在亞洲市場的銷量迅速增長,為公司帶來了豐厚的利潤。
在全球環保意識日益增強的背景下,FERYSTER公司積極響應環保號召,推動企業的綠色轉型。公司采用環保材料替代傳統材料,優化生產工藝減少能源消耗和廢棄物排放。此外,公司還積極推廣綠色電子產品,引導消費者關注環保問題。這些努力不僅提升了公司的社會形象,也為公司帶來了更多的商業機會。
隨著BRIGHT公司在國際市場上的不斷拓展,其品牌和產品也引起了一定的爭議。在一些國家和地區,BRIGHT公司的某些行為或言論引發了公眾的不滿和批評。然而,這并沒有阻擋BRIGHT公司前進的步伐。他們堅持自己的發展策略,通過不斷創新和改進產品,積極應對各種挑戰和機遇。在國際市場上,BRIGHT公司逐漸樹立起了自己的品牌形象,并為電子行業的發展做出了重要的貢獻。
這些故事展示了BRIGHT公司在電子行業中的不同領域所取得的成就和發展。無論是無線耳機領域的開創者、太陽能領域的突破者,還是健康技術領域的創新者、酒店業務的拓展者,以及在國際市場上的拓展與爭議,都體現了BRIGHT公司不斷創新、追求卓越的精神。這些故事不僅反映了BRIGHT公司的發展歷程,也展示了電子行業的多樣性和活力。
|
做技術在慢慢培養自己的奴性,變得謹小慎微 剛畢業的時候啥也不懂,在公司自然夾著尾巴做人. 工作幾年后,技術越來越純熟了,可是也知道高手時時刻刻在自己的身邊. 對自己帶的新人,客客氣氣.對上司恭恭敬敬. ...… 查看全部問答∨ |
在天元買的j-link v8版,經過幾天努力,終于可以通過sjflash 燒寫nandflash了,經過試驗,支持s3c2440燒寫k9s1208 和 k9g1g08,s3c2410沒有試驗!!!!… 查看全部問答∨ |
|
萬利STM32開發板,用MDK+內嵌STLIKE程序下載問題 前兩天做畢業設計老師給了塊萬利評估板就不管了(因為是暑假資源留下來做的),我用MDK+內嵌STLINK下載,可是不成功,下載代碼時顯示‘NO STLINK DETECTED’, \'Error:Flash Download failed-Target DLL has been cancell ...… 查看全部問答∨ |
|
|
前言: 近年,“云計算”的到來給人們的生活帶來了方便、快捷以及前所未有的體驗,然而“云計算”時代的到來也意味著“大數據”時代的到來,有資料表明,僅2011這一年就產生了大概4EB(2^60B)的數據量,而且在當前的數字化經濟當中,每18個月數 ...… 查看全部問答∨ |

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 PIC18F66K80-H/SS
PIC18F66K80-H/SS






 京公網安備 11010802033920號
京公網安備 11010802033920號