閑來無事,用手頭STM32做個項目。
成品功能: STM32通過GPS模塊采集位置數據,通過超聲波監測距離,看前方是否有障礙物,有的話蜂鳴器提醒。數據顯示在屏幕上,通過NB-IOT(BC26)模塊連接阿里云物聯網平臺接受數據并實時監控。
材料
STM32ZET6開發板(戰艦V3)
TFT顯示屏(戰艦有我用的2.7寸的)
NB-IOT(BC26)模塊
GPS模塊(ATK-NEO-6M GPS 模塊)
超聲波模塊(HCSR04)
杜邦線
用keil5進行開發
開始制作。
制作過程
首先測試GPS模塊,將例程下入板中測試。然后測試BC26模塊,通過AT指令接入阿里云,成功連接后再通過STM32接入阿里云實現通信。最后加入超聲波模塊。進行組合測試。https://blog.csdn.net/weixin_42320020/article/details/115556492
GPS模塊
GPS(ATK-NEO-6M GPS)模塊
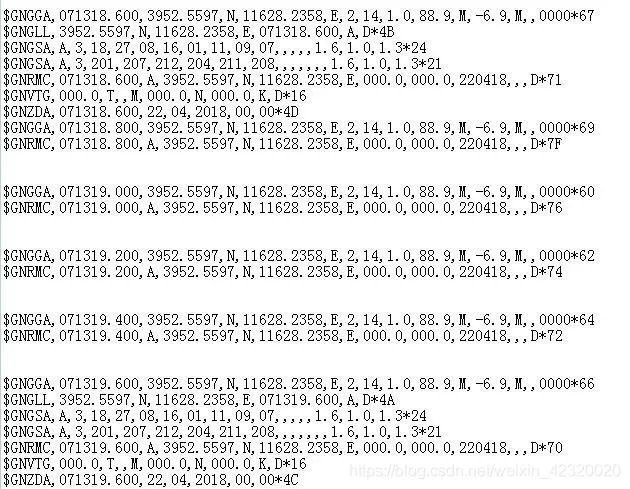
設置好后,模塊接收NMEA碼并解析出我們需要的數據。
例如:
在這里插入圖片描述
每個都代表著不同的數據。可以參考:GPS的NMEA碼的詳細解釋定義
具體的模塊已經配置好了,我們使用就可以了。
硬件連接
將模塊插入到開發板的ATK-MODULE接口(靠下插)即可。
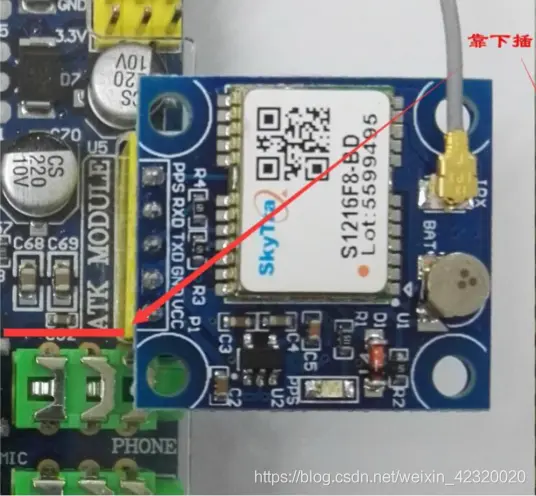
在這里插入圖片描述
短接: USART3_RX 和 GBC_TX 以及 USART3_TX 和 GBC_RX。
代碼測試
將原子哥的代碼下載到板子中進行測試。
通電測試(我開始在室內,等了好久都沒有數據,后來搬到室外就有數據了,第一次連接需要等一會兒,在室外有數據之后,再回到室內就還有數據。)
這樣即表示成功
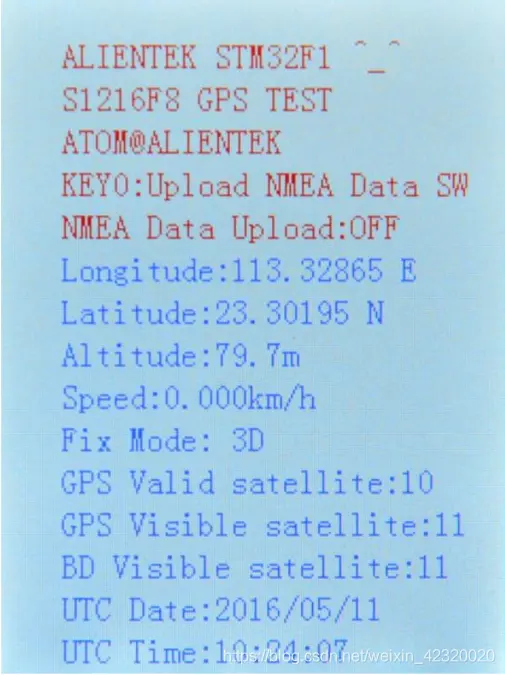
在這里插入圖片描述
NB-IOT(BC26)模塊
模塊配置連接阿里云可以參考我上篇文章。基于STM32的NB-IOT(BC26)的溫濕度監測系統
這里需要添加幾個展示。

在這里插入圖片描述
這樣BC26和阿里云對接就搞定了。
將GSM模塊加入BC26代碼中
哪個作為基礎代碼都可以
將模塊代碼文件加入。
在keil中添加引入這個文件。
在主函數中添加初始化函數。
將位置數據添加到串口中。

在這里插入圖片描述
這里位置數據是個結構體,我們這樣打包串口位置數據。{'GeoLocation':{'E':%.5f,'N':%.5f,'G':%.1f}
進行測試。

在這里插入圖片描述
可以看到已經有數據了。
超聲波模塊
超聲波模塊工作原理:
(1)采用IO口TRIG觸發測距,給最少10us的高電平信號。
(2)模塊自動發送8個40khz的方波,自動檢測是否有信號返回。
(3)有信號返回,通過IO口ECHO輸出一個高電平,高電平持續時間就是超聲波從發射到返回的時間,測試距離=(高電平時間聲速(340M/s)/2(發射和回來的時間,所以要除以2))*
超聲波STM32代碼:
void Ultra_Ranging(float *p){
u8 i;
u32 j;
float Ultr_Temp;
for(i=0;i<5;i++)
{
TRIG_Send=1;
delay_ms(10);
TRIG_Send=0;
while(!ECHO_Reci);
while(ECHO_Reci)
{
delay_us(10);
j++;
}
Ultr_Temp+=340/2*j*10;
j=0;
delay_ms(60);
}
*p=Ultr_Temp/5/1000000; }將超聲波代碼加入到寫好的代碼中。進行測試。
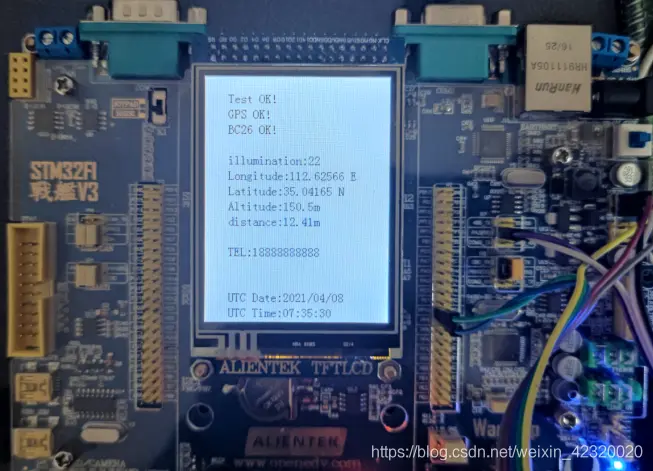
在這里插入圖片描述
可以看到效果跟預想的一樣。
最后加入當超聲波監測距離小于3米蜂鳴器報警。
這個項目就完成你了。
上一篇:STM32 模板文件配置
下一篇:VSCode+arm-none-eabi+openocd+msys實現STM32在線調試
推薦閱讀最新更新時間:2025-05-23 01:30

 資料包_電機驅動,基于STM32
資料包_電機驅動,基于STM32 【Follow me 第三季第1期】任務代碼
【Follow me 第三季第1期】任務代碼 STM32F429I-DISC-FollowMe
STM32F429I-DISC-FollowMe 相控陣天線手冊(英文)
相控陣天線手冊(英文) LT1016CS8#TR
LT1016CS8#TR設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- 青柚工作室PCB尺_NFC版
- AVR602,使用 ATtinyX3U 的應用電路
- RS232 to USB
- NCP1094GEVB:PoE-PD 接口控制器評估板
- 使用 Analog Devices 的 LTC1439IG 的參考設計
- AD8188-EVALZ,用于 350 MHz 單電源三路 2:1 多路復用器的評估板
- 基于A6986H的38 V,2 A同步降壓型開關穩壓器評估板
- AD9265-125EBZ 16 位 125 Msps 評估板(兼容 HSC-ADC-EVALCZ)
- LTC2946CMS-1 雙電源、電荷和能量監視器的典型應用,使用單個光耦合器進行電流隔離,并在任一電源出現故障時使用阻塞二極管來保持數據
- 基于ESP32-WROOM-32D(16MB)的開發板設計













 京公網安備 11010802033920號
京公網安備 11010802033920號