本文實例說明:
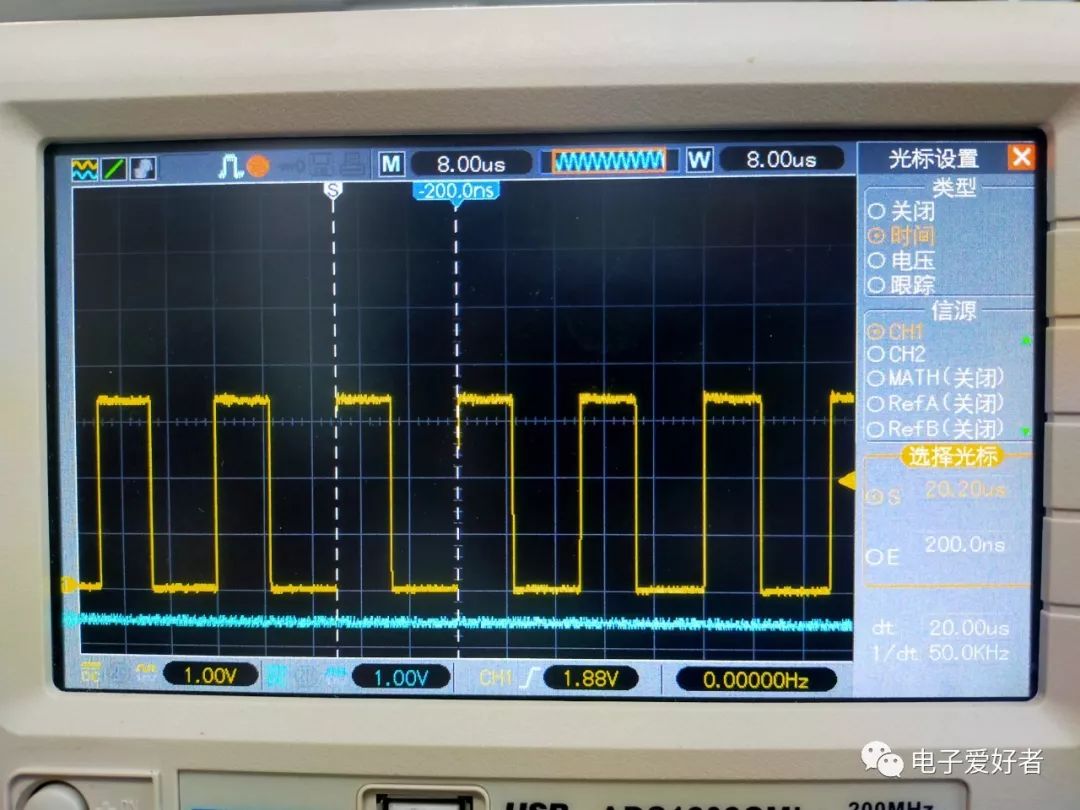
這里是使用 TIM3_CH2輸出 一個頻率為50kHz; 占空比為50% 的PWM信號。
1先配置STM32CubeMX 參數,如圖:

重點說明:
PWM 頻率 = APB1 Timer clocks (MHz) / [(Prescaler+1) * (Counter Period+1)]
APB1 Timer clocks (MHz) :64MHz
Counter Period : 20
Prescaler :設置為64-1 那么此時PWM時鐘設置為:
f = 64000000 / 64 /20 = 50KHz
Pulse :設置為10 ,也就是占比為:10/20 = 50%
Fast Mode:如果頻率太高可以使能快速模式。可以大大提高PWM反應時間;同時將IO口輸出速度調高。
2代碼分析:
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 64-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 20-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 10;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2); //啟動PWM輸出函數
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, 10);//這個函數可以設置占空比
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
3實驗現象:
上一篇:基于STM32的Keil和偏移地址程序存儲
下一篇:STM32單片機如何處理QT上位機串口中發過來的數據?
- 熱門資源推薦
- 熱門放大器推薦
 射頻電路設計
射頻電路設計 MAX2373EGC+T
MAX2373EGC+T
設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








- 納祥科技2W 24位數字功放NX4920,可用于AI語音播報、WIFI播放器
- 常用解調器的定義和工作原理
- 從性能與網絡傳輸出發,講講鐵威馬MAX系列為什么一騎絕塵
- 惠普選中Hailo下一代人工智能加速器,革新零售業與酒店業運營模式
- 跨國商務溝通困局破解之道:時空壺 W4Pro 全場景應用解析
- 從矢量降噪到雙向同傳,時空壺 W4Pro 如何重構 AI 同傳技術標準?
- LoRa+NB-IoT雙模融合,地下車庫信號盲區電梯場景等的冗余通信
- LoRa與UWB的“定位之戰”,成本敏感場景高精度需求的場景切割
- 時空壺X1再升級:引領AI同傳新時代,革新演講翻譯體驗
- ARXML 規則下 ECU 總線通訊與 ADTF 測試方案







 京公網安備 11010802033920號
京公網安備 11010802033920號