01汽車車載以太網的普及作為支持ADAS的設備,各種傳感器和攝像頭已被逐漸配置于汽車中。攝像頭數據傳輸通常使用LVDS等接口,而傳輸LiDAR等傳感器的數據時,采用車載以太網的案例則正逐漸增多。辦公用以太網采用了100Base-TX或1000Base-T標準,而用于汽車的以太網則規定使用100Base-T1或1000Base-T1標準。
02通過車載以太網傳輸信號
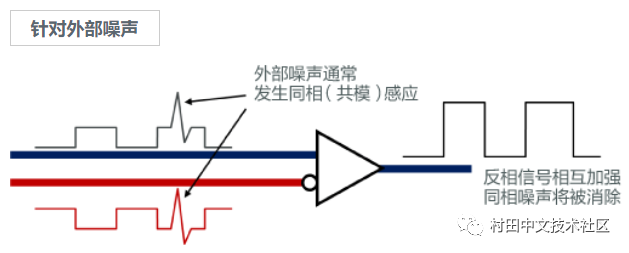
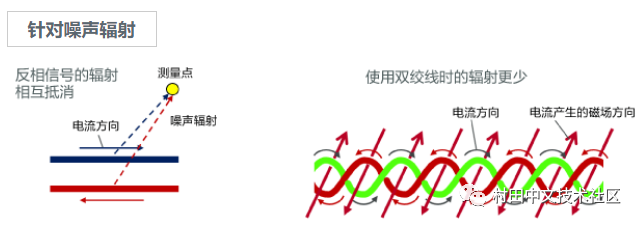
以太網等的車載接口采用了外部噪聲的影響較少或輻射較少的差動傳輸信號。外部噪聲通常會同時出現在兩條差動傳輸信號線上,對其差分沒有影響,因此差動傳輸信號線的抗外部噪聲能力較強。另外,成對的信號線相鄰,因此信號電流產生的磁場相互抵消,具有不易向外部輻射噪聲的優點。
03車載以太網的噪聲問題
差動傳輸線雖然被認為不易產生噪聲,但卻會由于各種因素而產生共模電流,從而引發噪聲問題。
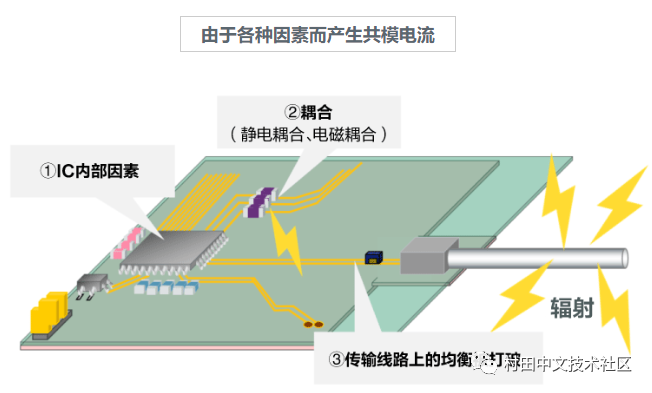
04共模噪聲的產生因素
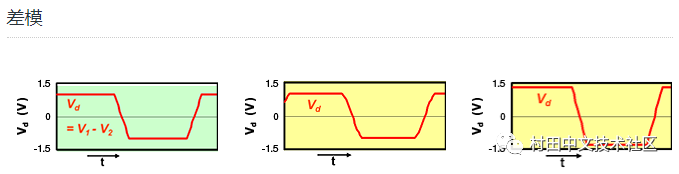
差動傳輸線的特點原本是不產生共模噪聲,但如果兩條線的信號存在偏斜(時間偏差)或振幅偏差,則兩條線的信號均衡將被打破,從而產生共模噪聲。
05車載以太網的靜噪措施
以太網的問題
用于以太網的電纜和HDMI、USB等的電纜之間有所區別。與成對信號線不同,HDMI或USB等的電纜中備有GND線,因此即使產生共模電流,也會通過GND線返回,從而使共模電流產生的磁場相互抵消,不易發生輻射。相反,以太網未配置GND線,因此共模電流通過對地雜散電容返回,從而具有易輻射的傾向。
HDMI、USB等的電纜
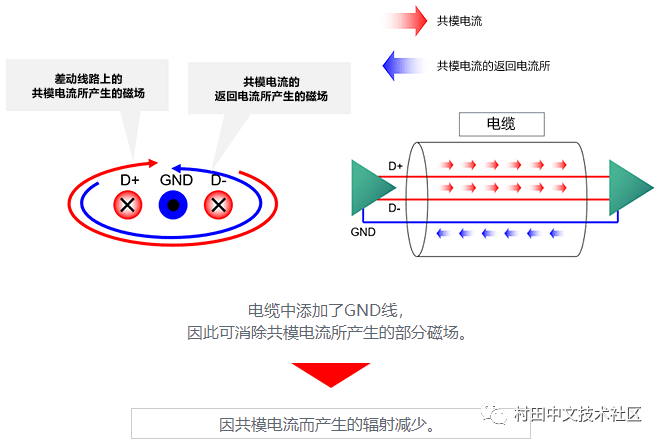
以太網的電纜
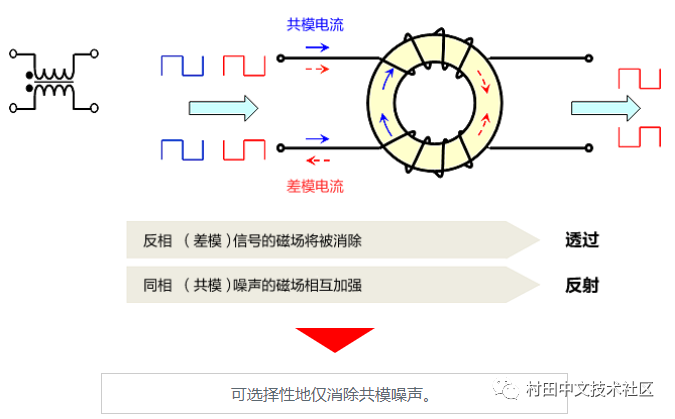
車載以太網等的差動傳輸靜噪措施中,共模扼流圈(CMCC)較為有效。共模扼流圈將兩條線以相反方向纏繞在同一卷芯部上,對于差模電流,兩條線產生的磁通相互抵消,因此不影響差動電流,而對于共模電流,兩條線產生的磁通則相互加強,所以可用作電感器。因此,共模扼流圈可在不影響差動信號的基礎上有效降低共模噪聲。
06用于車載以太網的CMCC的注意事項
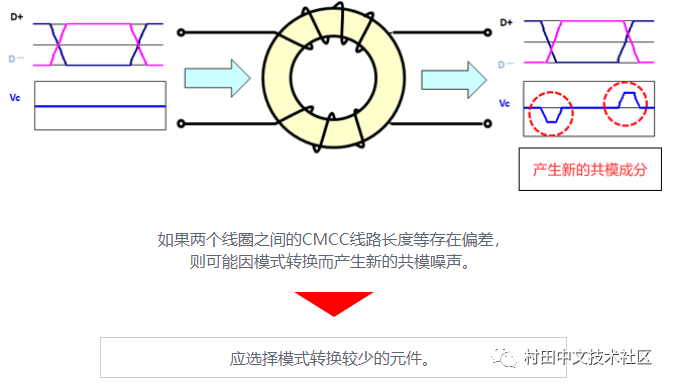
在車載以太網方面,CMCC的均衡也很重要。如果構成CMCC的兩條線的線路長度和繞線方式出現偏差,電流均衡將被打破,模式將發生轉換,從而可能產生共模噪聲。因此,應選用兩條線采用了均衡設計的CMCC。
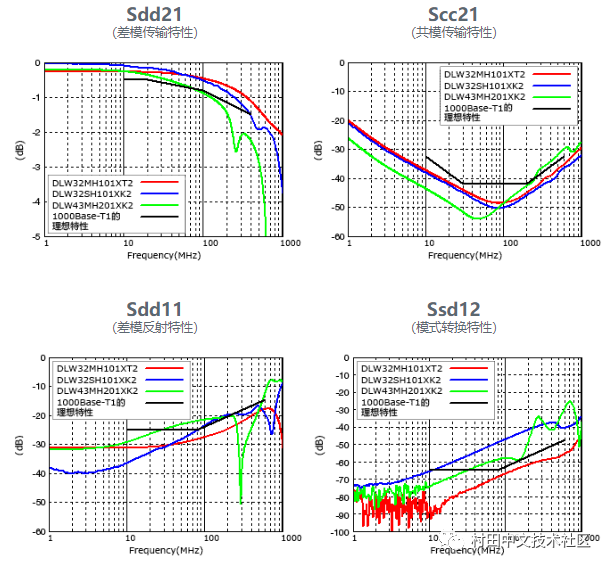
作為最適合1000Base-T1靜噪的CMCC,DLW32MH101XT2已被作為產品開發。該產品具有適用于1000Base-T1的阻抗值,并采用了不易發生模式轉換的均衡設計。
DLW32MH101XT2的傳輸特性
07傳導發射對策
傳導發射測量條件
村田使用1000Base-T1 EMC評估板進行了傳導發射測量(150Ω法)。
不同CMCC的降噪效果比較
從1000Base-T1 EMC評估板的信號線中提取共模噪聲,用EMI接收機進行測量。
此次通過更換CMCC進行了噪聲比較。
減少傳導發射時所使用的CMCC
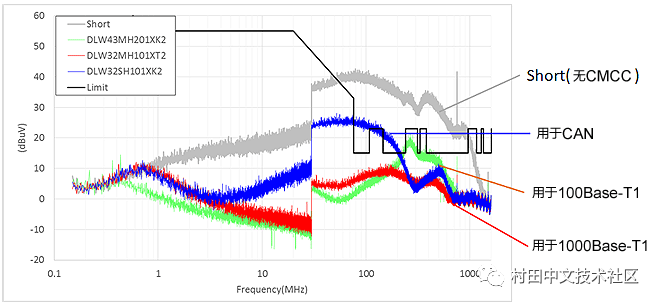
用于評估的CMCC使用了1000Base-T1用產品DLW32MH101XT2,比較對象使用了100Base-T1用產品DLW43MH201XK2,CAN使用了產品DLW32SH101XK2。
傳導發射測量結果
傳導發射測量結果顯示,1000Base-T1用產品DLW32MH101XT2的噪聲抑制效果最為明顯,且滿足限值要求。而DLW43MH201XK2、DLW32SH101XK2則未能在滿足限值要求之前抑制噪聲。
噪聲產生機制
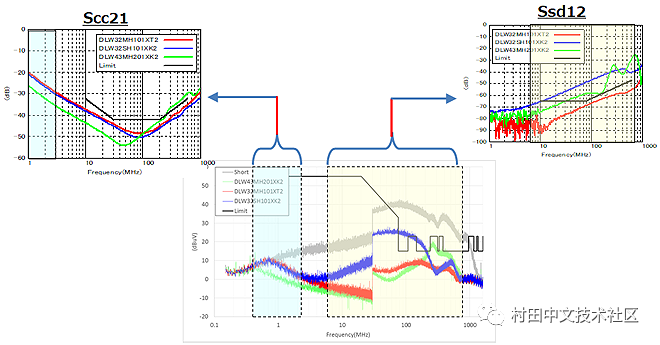
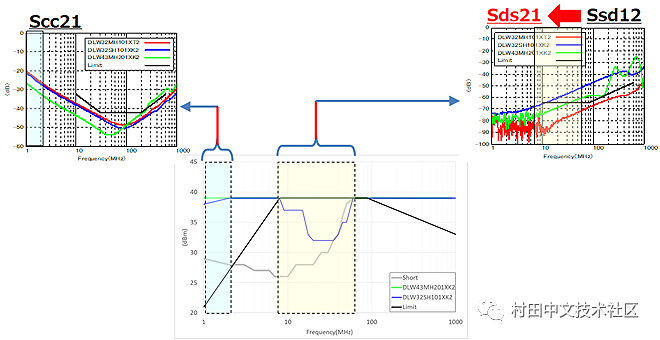
噪聲抑制效果因CMCC而不同的原因,可能是受到CMCC模式轉換特性Ssd12的影響。Ssd12值較高時,輸入的差模信號轉換為共模噪聲的比例將增加,從而導致噪聲水平增高。
降噪要點
Scc21在低頻段抑制共模噪聲的程度、Ssd12的模式轉換特性在高頻段減少共模轉換量的程度,將可能影響傳導發射測量結果。
評估板設計的注意事項
通過評估CMCC,村田了解了進行評估時評估板設計的注意事項。
將用于1000Base-T1的同一CMCC樣品貼裝到相同條件的評估板后,結果顯示二者噪聲水平有所不同,其中一個評估板變為NG狀態。
※即使是相同的CMCC樣品,也可能因評估板狀態而出現NG的情況。
通過對評估板的傳輸線路特性進行分析,發現CMCC輸出端的模式轉換特性有所不同,評估板#2的值較高。
傳導噪聲水平因評估板而異的原因在于,通過CMCC后的差模信號在評估板上轉換成了共模噪聲。
引發模式轉換的因素可能包括CMCC輸出端的電阻、電容器和電路板引線等,因其特性偏差而導致了不均衡現象的發生。
因此,對于CMCC以外的部分也應注意保持各條線的特性均衡。
100Base-T1的傳導發射
對100Base-T1進行了相同的傳導發射測量后,發現用于CAN的DLW32SH101XK2超出限值,而100Base-T1用產品DLW43MH201XK2則能充分有效地抑制噪聲且滿足限值要求。
100Base-T1與1000Base-T1的區別
100Base-T1與1000Base-T1的差模信號所含頻率成分不同,所以所需模式轉換特性也不同。因此,應選用按各自標準設計的CMCC。
08抗擾度(DPI)試驗對策
村田使用與傳導發射相同的1000Base-T1 EMC評估板進行了DPI(Direct Power Injection)試驗。
從外部向1000Base-T1 EMC評估板的信號線注入共模噪聲,在控制PC中確認了是否發生通信錯誤。
與傳導發射相同,該試驗使用了用于1000Base-T1的CMCC,即DLW32MH101XT2、用于100Base-T1的DLW43MH201XK2,以及用于CAN的DLW32SH101XK2進行了評估。

1000Base-T1的DPI試驗結果
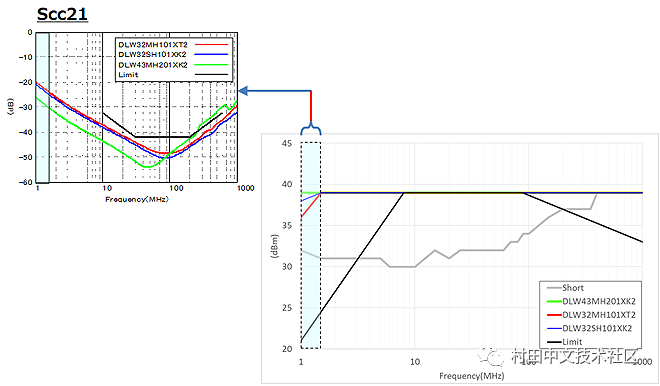
在2MHz以下的低頻段中,雖然電平會因CMCC不同而產生差異,但除此之外的其他表現并無差異,滿足了所有限值。
1000Base-T1的DPI試驗結果
在2MHz以下頻段,因CMCC而出現的不同可能取決于Scc21因素。因模式轉換特性而產生的差異并未影響DPI試驗。
09抗擾度(DPI)試驗對策的要點
100Base-T1的DPI試驗結果
繼1000Base-T1之后,在100Base-T1下進行的DPI試驗結果顯示,用于100Base-T1的CMCC滿足限值要求,而使用用于CAN的CMCC時,不僅在1MHz以下低頻段的表現遜色于用于100Base-T1的CMCC,且在8~60MHz范圍內還低于限值,結果為NG。
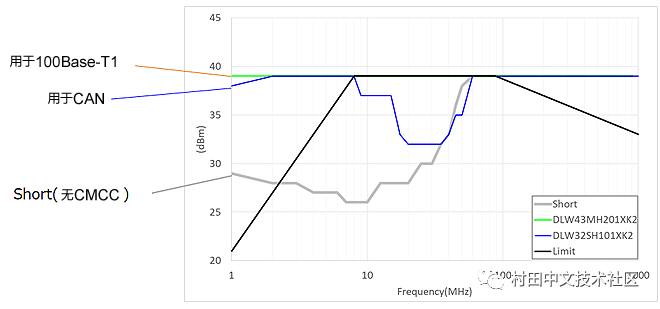
在2MHz以下頻段的不同可能取決于Scc21因素。此外,在8~60MHz頻段的不同則可能取決于模式轉換特性。
噪聲侵入機制
在100Base-T1下,CMCC的模式轉換特性對試驗結果產生了影響,其原因可能在于從外部注入的共模噪聲轉換為差模噪聲,使信號波形失真,進而引發通信錯誤。
評估板設計的注意事項
與傳導發射相同,除CMCC以外,因評估板上不均衡的設計而發生的模式轉換也會產生影響,因此進行評估板設計時需要加以注意。
10總結
車載以太網標準1000Base-T1要求用于靜噪的CMCC需具有高性能,而模式轉換特性則尤其重要。
評估傳導發射時,需要準備滿足1000Base-T1的要求值且具有模式轉換特性的CMCC,以達到抑制噪聲的目的。用于CAN或100Base-T1的CMCC無法滿足限值要求。
即便使用用于1000Base-T1的CMCC,也有可能因電路板的設計或要貼裝的元件的偏差而使模式轉換特性的性能降低、噪聲增加,因此設計時需要加以注意。
抗擾度試驗,即DPI試驗對CMCC性能的要求比傳導發射試驗低,但由于抗噪性因PHY而異,因此建議選擇模式轉換特性較低的CMCC。
上一篇:未來自動駕駛汽車會不會造成道路擁堵?
下一篇:關于車載Ethernet降噪措施的必要性
推薦閱讀最新更新時間:2025-07-02 18:29

 智能汽車傳感器技術詳解(357頁)
智能汽車傳感器技術詳解(357頁) 嵌入式硬件設計
嵌入式硬件設計
- MC33174DR2G 有源高 Q 陷波濾波器的典型應用
- 使用 Analog Devices 的 LTC1159CG-3.3 的參考設計
- LTC1727IS8-5、3.3V 和 5V 雙電源監視器的典型應用
- 使用 LT6202 將 ±10V 雙極性信號轉換為 0V 至 5V 輸入信號到 LTC2370CMS-16 的典型應用
- LT3724 的典型應用 - 高電壓、電流模式開關穩壓控制器
- TS9010ACX5 RF 150mA, 1.5V CMOS LDO with Enable 典型應用電路
- L5150GJ 5 V 低壓差穩壓器的典型應用
- MPC86XADS、XPC8xx 參考板,基于 XPC860EN MPU PowerQUICC MPC8xx 處理器
- OP249GSZ-REEL 失調調整的典型應用電路,用于同相放大器配置
- 使用 Microchip Technology 的 MAX3221ECAE 的參考設計













 京公網安備 11010802033920號
京公網安備 11010802033920號