圖1,是一個按鈕控制電機正反轉電路。圖中,QS為斷路器,KM1正轉接觸器,KM2反轉接觸器,FR熱繼電器,SB為按鈕,KA1、KA2、KA3為三個中間繼電器。紅色為帶電部分。這個電路的動作步驟是:第一次按SB,KM1吸合,正轉啟動,第二次按SB,KM1釋放,電機停止。第三次按SB,KM2吸合,反轉啟動,第四次按SB,電機停止。

下面詳細分析每個步驟。
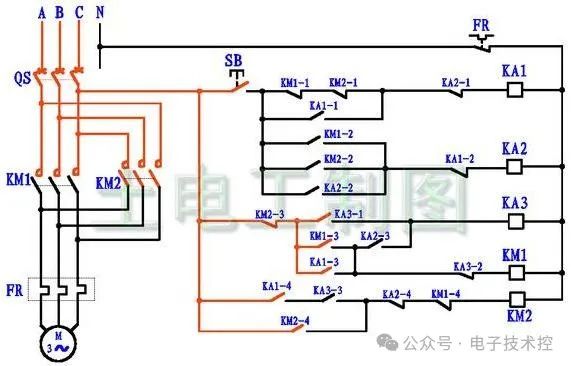
圖2 圖2,合上斷路器QS。
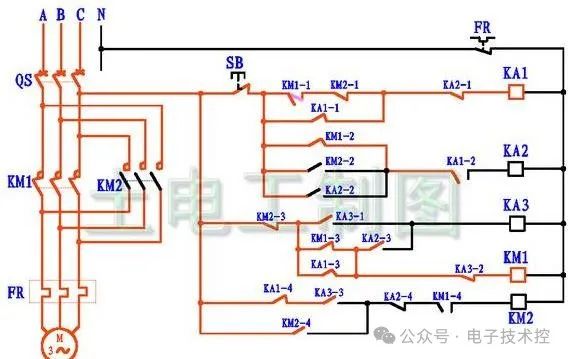
圖3 圖3,首先來啟動電機正轉,按下按鈕SB,不松開,如圖,KA1吸合,KA1-1閉合自保,KA1-2斷開,是KA2不能得電。KA1-3閉合,使KM1接觸器線圈得電,KM1-3閉合,自保。電機正轉。
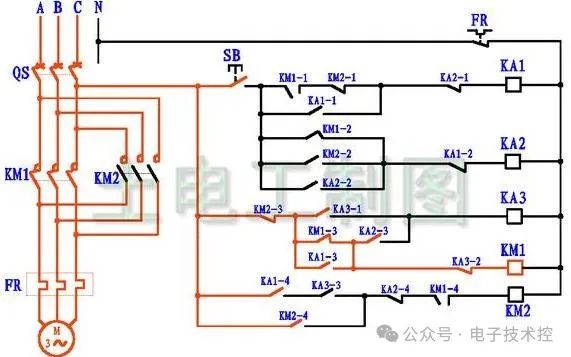
圖4 圖4,松開按鈕SB,看圖中變化,KA1釋放,它的所以觸點復位。KM1吸合著,它的所以觸點都動作狀態。這個時候就完成了電機的正轉啟動。
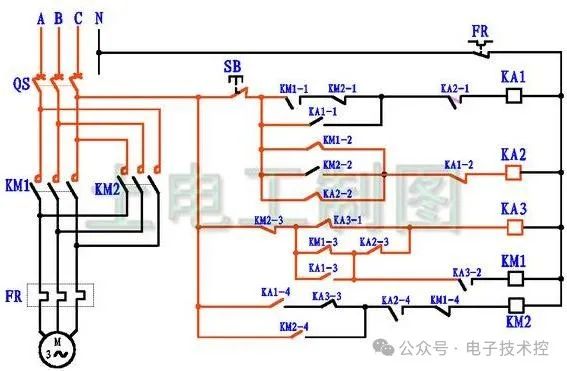
圖5 圖5,再次按下SB,不松開,這時,由于KM1是吸合的,所以KM1-1斷開,KA1不得電,KM1-2是閉合的,所以KA2得電,KA2-2閉合,自保。KA2-3閉合,使KA3得電吸合,KA3-1閉合自保,KA3-2斷開,使接觸器KM1斷開釋放。電機停止。
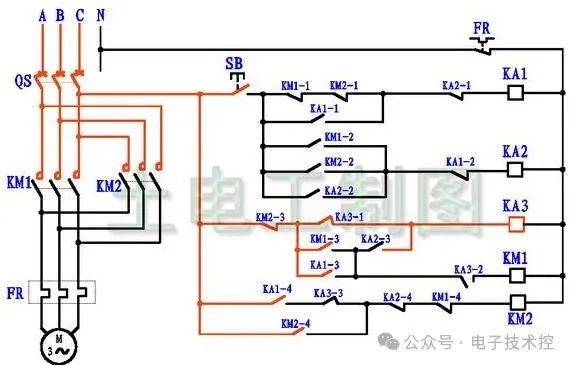
圖6 圖6,松開SB,看圖中變化,KA3這時吸合自保。它的所以觸點都保持動作狀態。完成電機正轉停止。
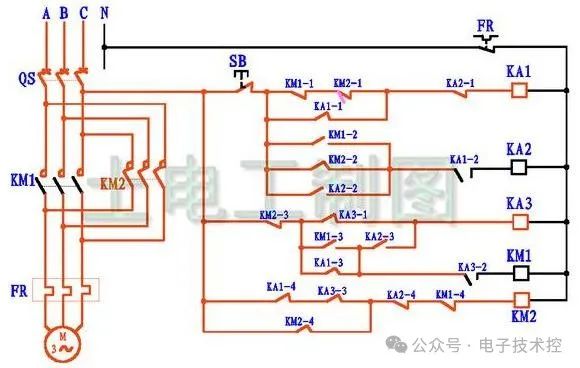
圖7 圖7,第三次按鈕SB,不松開,KA1吸合,自保,因為這時,KA3也是吸合的,所以,KA1-4和KA3-3都閉合使KM2接觸器吸合,并自保。
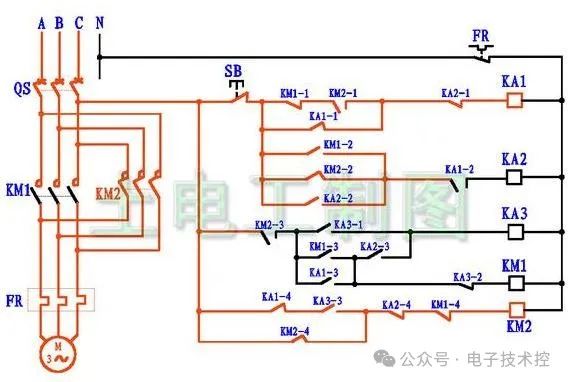
圖8 圖8,這時,仍沒松口按鈕SB,看圖中變化,KM2吸合,因此,KM2-3斷開,使KA3斷電釋放。
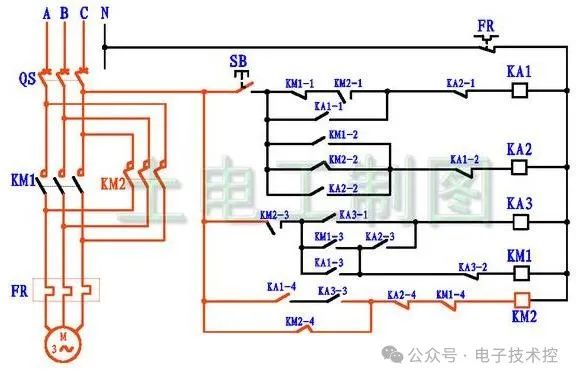
圖9 圖9,松口按鈕SB,各觸點的動作情況如圖。這時完成了電機反轉啟動。
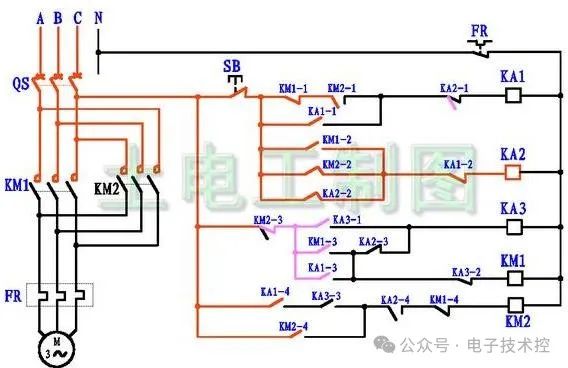
圖10 圖10,第四次按下按鈕SB,KA2吸合,KA2-4斷開,使KM2接觸器斷電釋放。電機停止。

圖11 圖11,送開按鈕SB,電路復位。
關鍵字:按鈕 控制電機 正反轉
引用地址:
按鈕控制電機正反轉電路分析
推薦閱讀最新更新時間:2025-06-06 23:52
關于多路步進電機控制系統的設計方案分析
本文設計實現了一種三路步進電機控制系統,它基于RTThread嵌入式實時系統,提高了系統的實時性和后期的功能擴展能力。系統控制電路采用STM32F4系列的微控制器,結合小功率步進電機驅動器A4988,完成了硬件電路板設計。軟件中運用操作系統自帶的finsh機制,實現對指令的初步解析,控制系統可以通過讀取G指令,控制多路電機按照一定軌跡運動,同時可以調節電機運動的加減速參數。實際項目驗證證明該系統具有很好的穩定性。 隨著計算機技術和微電子技術的發展,步進電機作為自動化控制的執行單元,越來越多地運用在各種領域中,許多控制領域需要對多臺步進電機進行同步協調控制,如軍事、航空、機器人控制。特別是近年來,隨著嵌入式技術和集成化的發展,其
[單片機]

貿澤電子開售適用于智能電機控制和機器學習應用的 NXP Semiconductors MCX微控制器
貿澤電子開售適用于智能電機控制和機器學習應用的 NXP Semiconductors MCX微控制器 2024年4月10日 –提供超豐富半導體和電子元器件?的業界知名新品引入 (NPI) 代理商貿澤電子 (Mouser Electronics) 即日起開售NXP Semiconductors的MCX工業和物聯網微控制器 (MCU)。這些新款MCU屬于高性能、低功耗微控制器,配備智能外設和加速器,適用于安全、智能的電機控制和機器學習應用。 貿澤供應的NXP全新MCX N系列微控制器搭載Arm? Cortex?-M33 CPU,配備智能外設和加速器、通信和信號處理功能,可擴展性強,易于開發。 MCX N的低功耗高速緩存
[工業控制]
異步電機直接轉矩控制學習筆記
導讀:本期文章對異步電機直接轉矩控制進行梳理學習。DTC包括轉速外環、磁鏈觀測器、滯環和電壓矢量離線開關表。離線電壓矢量開關表分為兩種:添加零矢量和未添加零矢量。 一、引言 不同于矢量控制技術,DTC利用Bang-Bang控制(滯環控制)產生PWM信號,對逆變器的開關狀態進行最佳控制,從而獲得轉矩的高動態性能。DTC具有自己的特點,它在很大程度上解決了矢量控制中存在的一些問題,如計算的復雜特性,易受電動機參數變化的影響,實際性能難以達到理論分析結果等。DTC摒棄了傳統矢量控制中的解耦思想,而是將轉子磁通定向更換為定子磁通定向,取消了旋轉坐標變換,減弱了系統對電機參數的依賴性,通過實時檢測電機定子電壓和電流,計算轉矩和磁鏈的幅值
[嵌入式]
伺服電機控制器的三種分類
伺服電機控制器的類型包括降壓起動器、調速驅動器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式,那么下面就詳細介紹一下相關內容。 01 伺服電機控制器的各項類型 1、降壓起動器 可以用二個或是多個接觸器,在電動機啟動時提供較低的電壓。使用自耦變壓器或串聯電感,可以在電動機啟動時在端子輸入較低的電壓,減小啟動轉矩及突入電流,在電動機的速度到達額定轉速的一定比例時,起動器自動將電動機端子切換到正常電壓輸入。因為自耦變壓器及串聯電感只在啟動時有重壓的啟動電流流過,時間可能只有幾秒,因此其額定會比相同電流,連續使用下的額定要小。較低的電壓到正常電壓的切換可以用時間計時來切換,或是配合電流感測器,當電
[嵌入式]
PLC控制步進電機的速度和角度 PLC控制柜由哪些元件組成
1.首先讓你看下為啥電工適合學PLC 2.380V恒壓供水線路圖 3.PLC控制步進電機的速度和角度 4.最全的電氣字母符號 5.PLC的數據傳送,BMOV和FMOV 6.自制無線監聽器 7.電線截面在不同電壓下帶動功率數 8.家庭配電箱如何接線 9.三菱PLC控制伺服回原點的過程 10.PLC與步進電機驅動器實物接線圖 11.PLC控制柜由哪些元件組成 12.常用電纜安全載流量計算方法 13.一分鐘教會你安裝監控系統 14.臥室床頭三控燈線路 15.雙電源自動轉換開關接線 16.PLC基本指令之數學函數 17.正反轉控制電路 18.門禁如何接線 19.如何根
[嵌入式]
步進電機控制解惑
1.簡介 步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機。步進電動機的結構形式和分類方法較多,一般按勵磁方式分為磁阻式、永磁式和混磁式三種;按相數可分為單相、兩相、三相和多相等形式。 步進電機價格便宜,擁有優秀的啟停和反轉響應,因為沒有電刷,可靠性和壽命都較高,并且控制簡單,由于其沒有過載能力,且不能高速運行,常常被使用在低速、低負載有位置控制要求的場合,在各個領域都被廣泛應用。 步距角是步進電機的一個重要參數,步距角越小步進電機的控制精度越高。例如步距角1.8°,整步
[嵌入式]
機器人核心技術之控制電機的應用
隨著國內中高端制造業不斷發展,越來越多地需要使用伺服系統來實現制造高質量和的目的,這一需求促使國內伺服系統市場呈現快速增長趨勢。 伺服系統的基本組成部分包括、、、等。 其中,被稱為“的心臟”,成本占比約35%,一般安裝在的“關節”處,為機器人提供精準的控制效果。 伺服電機廣泛應用于先進制造業,替代需求+新增需求,推動伺服市場規模穩步增長。 伺服電機在新興產業應用規模也不斷增長。據工控網數據,2022年中國伺服電機市場規模達181億元,預計2023年中國伺服電機市場規模將增長至195億元。
伺服電機行業概覽 ? ? ? ? ? ? ? ? ? ? ? ??
“伺服”表示電機在閉環中運行,該系統使用來自編碼器或旋
[機器人]
新能源汽車電驅動系統電機控制器基礎及制造
1、足夠大的啟動轉矩,以滿足電動汽車快速啟動、加速、爬坡、頻繁啟停的要求,通常電機。的過載系數應達3~4。 2、 電機 的調速范圍大,一般在最大轉速的25%~ 100%范圍內,近似有小轉矩、恒功率的輸出特性,滿足電動汽車最高車速和功率巡航行駛工況的要求。 3、具有良好的效率特性,在較寬的轉速/轉矩范圍內,獲得最優的效率,提高一-次充電后的持續續航里程,一般 要求在典型的駕駛循環區,獲得85%~93%的效率。 4、再生制動時的能量回收率高。 5、快速的轉矩相應特性,在各種車速范圍內能快速而柔和地控制驅動制動轉矩;在多電機系統中,要求電機可控性高,穩態精度和動態特性好。
[嵌入式]
 TT-DL-1電力電子技術及電機控制實驗裝置指導書
TT-DL-1電力電子技術及電機控制實驗裝置指導書 電氣驅動與電力電子變換器的先進控制(英文)
電氣驅動與電力電子變換器的先進控制(英文) 單片機程序400例
單片機程序400例 射頻電路設計
射頻電路設計













 京公網安備 11010802033920號
京公網安備 11010802033920號