本篇文章主要介紹主流自動(dòng)駕駛實(shí)現(xiàn)方案中舉足輕重的一個(gè)部分——高精地圖。之所以稱(chēng)其為主流方案,是因?yàn)榭傆幸粋€(gè)奇葩,那就是特斯拉,偏偏不走尋常路。而除此之外,包括Waymo、蔚來(lái)、百度等上下游企業(yè)均選擇了高精地圖作為自動(dòng)駕駛的支撐點(diǎn)。從Apollo的課程安排上也可以看出百度對(duì)自家高精地圖的重視和自信,畢竟比地圖資源可沒(méi)有幾家有他那樣的資質(zhì)。
那么今天我們就來(lái)聊一聊高精地圖。
一、高精地圖VS傳統(tǒng)地圖
首先需要解決的問(wèn)題是——什么是高精地圖?這要先從我們平時(shí)開(kāi)車(chē)、出行所使用的導(dǎo)航地圖說(shuō)起。當(dāng)我們想去某地時(shí),只要將目的地的名稱(chēng)輸入app,軟件便會(huì)為我們規(guī)劃出一條或幾條合理的路線,不過(guò)這樣的路線通常只會(huì)顯示一些較少的信息。得益于人類(lèi)發(fā)達(dá)的智能水平,你可以靠肉眼觀察便能讀懂各種交通信號(hào)、知道何時(shí)要變道、不能走錯(cuò)車(chē)道、何時(shí)需要限速。
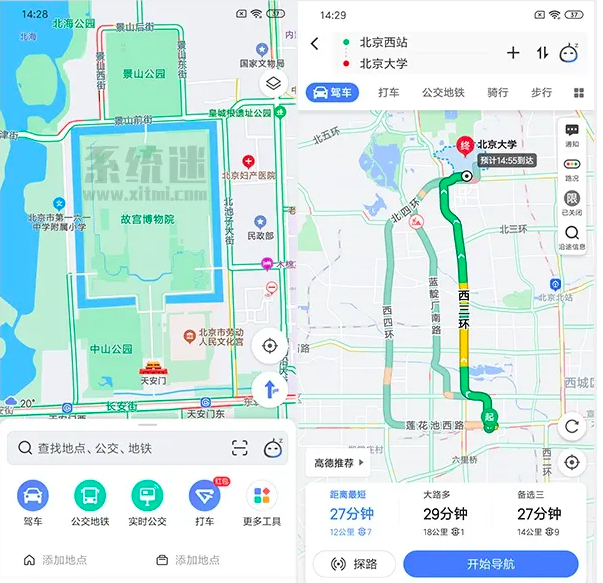
示例照片顯示某導(dǎo)航app能提供三種行車(chē)路線,以及擁堵、施工等信息。傳統(tǒng)地圖主要是給人看的。
但是輪到車(chē)自己開(kāi)了,這樣的地圖就顯得不夠用了,因?yàn)檐?chē)輛的智能水平還遠(yuǎn)遠(yuǎn)達(dá)不到人類(lèi)的水平,他們并不能知道路牌的信息含義、交通燈在哪,不同的車(chē)道代表了什么。因此,為了配合車(chē)輛做好感知、決策等一系列工作,人們開(kāi)發(fā)出了高精地圖,這個(gè)地圖主要是為了給車(chē)看的。
因此,現(xiàn)在可以給出高精地圖的定義了:高精地圖(High Definition Maps, 縮寫(xiě)為HD Maps)是一種包含大量駕駛輔助信息的高精確度機(jī)器用地圖。
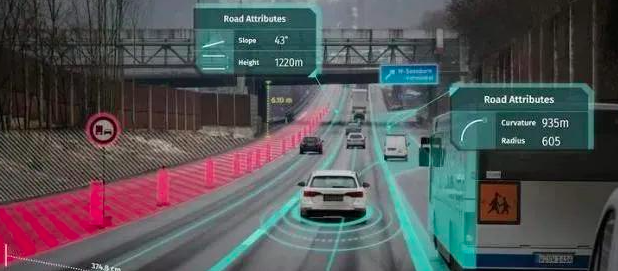
那什么叫做“駕駛輔助信息”呢?實(shí)際上,你在路上開(kāi)車(chē)碰到的所有車(chē)道標(biāo)志、路牌標(biāo)志、交通燈、路口布局、路標(biāo)位置等等所有幫助你進(jìn)行駕駛過(guò)程的都叫駕駛輔助信息。比如,你看到地面上的車(chē)道標(biāo)志了,就知道左轉(zhuǎn)該走哪條車(chē)道、直行走哪條車(chē)道,中間的黃線不能逾越。根據(jù)上方的紅綠燈信息,你就知道了何時(shí)可以左轉(zhuǎn),何時(shí)能夠直行,甚至這幅圖中還出現(xiàn)了左轉(zhuǎn)專(zhuān)用道,你還需要知道何時(shí)前出,駛?cè)氲群騾^(qū)。
再比如,下面這種豎在路邊的路牌也提供了駕駛信息,它告訴你機(jī)動(dòng)車(chē)走哪條道,行人、自行車(chē)走哪條道,甚至這背后還暗含這樣的語(yǔ)義信息,駕駛時(shí)注意路邊的行人和自行車(chē)。

每一次駕駛行為中其實(shí)充滿(mǎn)了這些各式各樣的“輔助信息”,只是人類(lèi)以其智慧能夠輕松應(yīng)對(duì),但是車(chē)輛就不行,它沒(méi)法像人一樣這么好的理解這些信息,因此就需要一幅為他量身打造的地圖,把這些信息全部標(biāo)出來(lái)告訴他,他才能看得懂。
高精地圖最重要的特征之一便是“高精”,這一點(diǎn)從名字上就能看出來(lái)。那它的精度到底有多高呢?一般普通導(dǎo)航地圖所采用的GPS定位精確度為米級(jí),信號(hào)較好的開(kāi)闊地帶一般定位較為精準(zhǔn),但是一旦信號(hào)減弱或是有房屋遮擋,把你定位到河里也是有可能的。但是這在自動(dòng)駕駛場(chǎng)景下便是不可接受的,因?yàn)檫@會(huì)給車(chē)輛帶來(lái)錯(cuò)誤的感知定位,以至于產(chǎn)生災(zāi)難性的后果,因此,將精度提高到“厘米級(jí)”勢(shì)在必行。
精確度為米級(jí),會(huì)導(dǎo)致自主泊車(chē)上路牙子
二、高精地圖對(duì)于整個(gè)自動(dòng)駕駛?cè)蝿?wù)的重要意義
相對(duì)于人類(lèi)的“高智商”,車(chē)輛也并非一無(wú)是處。他們擁有強(qiáng)大的“記憶能力”,可以記住每一個(gè)車(chē)道標(biāo)記、每一處路標(biāo),從而確保定位精準(zhǔn)。一幅高精地圖放在人類(lèi)面前可能是眼花繚亂,過(guò)多的信息甚至?xí)蓴_人集中注意力駕駛;但是擺在機(jī)器面前那可是“多多益善”。自動(dòng)駕駛車(chē)輛還能依靠高精地圖進(jìn)行提前的規(guī)劃。因?yàn)槭孪纫呀?jīng)采集到了行駛道路的所有數(shù)據(jù),因此便可在實(shí)驗(yàn)室的仿真軟件中事先對(duì)路徑進(jìn)行預(yù)測(cè)規(guī)劃。
高精地圖對(duì)于感知、定位和規(guī)劃等核心模塊而言起到了基礎(chǔ)性的作用,它支撐著上層的算法架構(gòu)。
1.高精地圖對(duì)感知功能的幫助在于它“提升”了硬件傳感器的感知范圍。和人類(lèi)的眼睛一樣,無(wú)人駕駛車(chē)輛的傳感器也是受到距離限制的,尤其是在惡劣自然環(huán)境下,感知范圍大大受限。而高精地圖由于事先即存好了相應(yīng)地點(diǎn)的地理位置信息,便可幫助傳感器進(jìn)行超前感知。另外,高精地圖還能幫助傳感器縮小檢測(cè)范圍。高精地圖能夠告訴傳感器在哪些特定區(qū)域搜尋想要的信息,如交通信號(hào)燈、停車(chē)路牌等,這樣縮小了ROI(感興趣區(qū)域)的大小,便可節(jié)省感知耗費(fèi)的時(shí)間。
2.高精地圖能夠?yàn)檐?chē)輛提供精準(zhǔn)定位。車(chē)輛的自主定位是從收集路標(biāo)點(diǎn)開(kāi)始的,通過(guò)感知得到的多模態(tài)數(shù)據(jù)在這一步里經(jīng)過(guò)預(yù)處理、坐標(biāo)轉(zhuǎn)換和數(shù)據(jù)融合,將路標(biāo)點(diǎn)與高精地圖中所存的已有信息進(jìn)行匹配,從而判斷出車(chē)輛的準(zhǔn)確位置。
3.高精地圖可幫助預(yù)測(cè)規(guī)劃模塊找到合適的行車(chē)路線。例如,它能夠根據(jù)自身掌握的道路信息提前為車(chē)輛指明哪條路不堵,那條路行駛紅燈少等。它還能指引汽車(chē)找尋到車(chē)道中線,從而盡可能沿車(chē)道線安全行駛;在有限速等標(biāo)志牌的路段,高精地圖能夠提前幫助決策進(jìn)行車(chē)輛減速,從而降低突然減速帶來(lái)的不適駕乘體驗(yàn)。
三、如何構(gòu)建高精地圖
想要構(gòu)建高精地圖自然少不了地圖采集設(shè)備,這里涉及到地圖測(cè)繪方面的專(zhuān)業(yè)知識(shí),就一筆帶過(guò)。這樣的采集車(chē)攜帶的全是專(zhuān)業(yè)設(shè)備,并且具有地圖采集資質(zhì)的地圖商并不多,這里面涉及很多國(guó)家機(jī)密,因此是不會(huì)對(duì)外國(guó)公司開(kāi)放的。前不久被調(diào)查的滴滴就是因?yàn)檎莆樟顺鲂械貓D數(shù)據(jù),涉及重大國(guó)家安全數(shù)據(jù)泄露而被多部委調(diào)查了。
百度為Apollo采集了一套覆蓋中國(guó)大部分高級(jí)道路的高精地圖,同時(shí)這些地圖還需不斷維護(hù)升級(jí),比如這里的路在維修、那出了場(chǎng)車(chē)禍等等都可能引起高精地圖的“高精”不在。因此在數(shù)據(jù)采集階段,地圖公司需要養(yǎng)一個(gè)龐大的采集車(chē)隊(duì),以確保對(duì)地圖的修正和更新。
在獲得采集到的大量數(shù)據(jù)后,需要對(duì)數(shù)據(jù)進(jìn)行處理,包括整理、分類(lèi)、清洗等,以獲得一張沒(méi)有任何語(yǔ)義信息或注釋的初始地圖模板。隨后,需要使用機(jī)器學(xué)習(xí)的方法對(duì)這上面的物體進(jìn)行識(shí)別標(biāo)注,這是一項(xiàng)繁復(fù)浩大的工程,所幸這些都可通過(guò)自動(dòng)標(biāo)注完成,大大減輕了人工標(biāo)注的工作量。之后還需進(jìn)行手動(dòng)驗(yàn)證,這確保了自動(dòng)地圖創(chuàng)建過(guò)程中一切正常進(jìn)行,并能夠及時(shí)發(fā)現(xiàn)問(wèn)題。這些工作都做完之后,一幅高精地圖便可上線發(fā)布了。
當(dāng)然,這樣龐大的工作如果只靠Apollo一家來(lái)做自然也是不現(xiàn)實(shí)的,百度采取了眾包的模式,讓每一個(gè)用戶(hù)在每日駕駛過(guò)程中幫助更新高精地圖,從而確保地圖的實(shí)時(shí)準(zhǔn)確性。
下面是找到的另一家地圖廠商在構(gòu)建高精地圖時(shí)的方法,可供大家了解參考。
想要更深入的學(xué)習(xí)高精地圖是如何制作的,推薦大家去報(bào)名深藍(lán)學(xué)院的《基于圖像的三維重建》這門(mén)課程。眾所周知,基于圖像的三維重建是自動(dòng)駕駛中制作矢量高精地圖的關(guān)鍵技術(shù),而深藍(lán)學(xué)院邀請(qǐng)名師授課,梳理了三維重建的完整技術(shù)流程,又提供針對(duì)性的編程訓(xùn)練。在這一領(lǐng)域苦苦鉆研的小伙伴建議去聽(tīng)一聽(tīng)~
四、高精地圖的問(wèn)題
最后來(lái)談一談高精地圖的問(wèn)題。其實(shí)高精地圖本身最大的優(yōu)點(diǎn)同時(shí)也是其最大的缺點(diǎn)。如何理解這句話?高精地圖由于追求“高精”而使日常維護(hù)變得極為繁瑣,在降低實(shí)現(xiàn)L4自動(dòng)駕駛難度的同時(shí)也讓相關(guān)自動(dòng)駕駛算法更加依賴(lài)于高精地圖,換句話說(shuō),如果車(chē)輛行駛至某處沒(méi)有高精地圖或者高精地圖沒(méi)來(lái)得及更新的地點(diǎn),則可能導(dǎo)致車(chē)不會(huì)走了而發(fā)生交通事故。這也是為何激進(jìn)的特斯拉選擇直接放棄高精地圖的原因。
上一篇:網(wǎng)絡(luò)關(guān)閉但ECU沒(méi)有休眠前如何進(jìn)行網(wǎng)絡(luò)喚醒呢?
下一篇:深度剖析純電動(dòng)汽車(chē)多擋化發(fā)展進(jìn)程
推薦閱讀最新更新時(shí)間:2025-06-27 16:31

 智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)鏈全景圖(可做求職參考)
智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)鏈全景圖(可做求職參考) 嵌入式硬件設(shè)計(jì)
嵌入式硬件設(shè)計(jì)- 方案分享 | ARXML 規(guī)則下 ECU 總線通訊與 ADTF 測(cè)試方案
- 車(chē)載SerDes產(chǎn)業(yè)起飛!國(guó)產(chǎn)新品密集炸場(chǎng)
- 出貨量激增1.34倍! 5G車(chē)規(guī)模組成標(biāo)配,三大廠商新品同臺(tái)競(jìng)技
- 6月新能源市場(chǎng):零跑創(chuàng)新高;比亞迪海外突破;理想滑坡
- 基于中科芯車(chē)規(guī)MCU的LED矩陣大燈應(yīng)用方案
- 潤(rùn)石科技推出RS3215-Q1系列低壓差線性穩(wěn)壓器
- CANape 23開(kāi)啟智能測(cè)試新時(shí)代(下)
- 軟件定義汽車(chē)電源管理設(shè)計(jì):NXP的PMIC選型攻略解析
- 深度測(cè)評(píng)時(shí)空壺X1同聲傳譯器:全球最先進(jìn)AI同傳設(shè)備的非凡實(shí)力

- AD8532ARZ-REEL7 單電源立體聲耳機(jī)驅(qū)動(dòng)器的典型應(yīng)用
- 使用具有 PowerPath 和 2A 輸入限制的 LTC4162EUFD-L40M 9V 至 35V、2 節(jié)、3.2A 充電器的典型應(yīng)用
- NB3H5150MNGEVB:2.5V/3.3V 低噪聲多速率時(shí)鐘發(fā)生器評(píng)估板
- 使用 STMicroelectronics 的 R5970AD 的參考設(shè)計(jì)
- AM2G-2409SZ 9V 2 瓦 DC-DC 轉(zhuǎn)換器的典型應(yīng)用
- LTC3859AHFE 雙輸出、降壓/降壓/升壓同步控制器的典型應(yīng)用電路,具有改進(jìn)的突發(fā)模式操作
- MCP1501-20E/RW 2.048V ADC 示例電路的典型應(yīng)用電路
- AM30EW-4805DZ Φ5V雙輸出DC/DC轉(zhuǎn)換器的典型應(yīng)用
- DER-218 - 100 W 制冷電源
- NCP5007 緊湊型背光 LED 升壓驅(qū)動(dòng)器的典型應(yīng)用,具有模擬反饋的基本直流電流模式操作






- 上汽大眾:汽車(chē)網(wǎng)絡(luò)安全漏洞防護(hù)
- 恩智浦推出全新電池控制IC系列 助力新能源解決方案發(fā)展
- 全球首條GWh級(jí)新型固態(tài)電池生產(chǎn)線樣件下線
- 總投資455億元!三大動(dòng)力電池項(xiàng)目齊刷進(jìn)度條
- 現(xiàn)代汽車(chē)韓國(guó)建氫燃料電池廠,2028年投產(chǎn)
- 6月融資一覽:智能汽車(chē)芯片、第三代半導(dǎo)體、機(jī)器人成資本焦點(diǎn)
- 艙駕一體“點(diǎn)燃”新戰(zhàn)事
- 汽車(chē)智能化2.0引爆「萬(wàn)億蛋糕」,誰(shuí)在改寫(xiě)游戲規(guī)則?
- 2025研華智能系統(tǒng)產(chǎn)業(yè)伙伴峰會(huì)成功舉辦
- 意法半導(dǎo)體公布2025年第二季度財(cái)報(bào)和電話會(huì)議時(shí)間安排
- 工信部嚴(yán)厲通報(bào)16款違規(guī)App:侵害用戶(hù)權(quán)益還未整改
- 100W系超級(jí)快充?realme副總裁爆料嚇人技術(shù)
- iQOO Z1x:120Hz競(jìng)速屏/5000mAh電池/33W閃充
- 雷軍預(yù)告Redmi下一代旗艦:K30 Pro的遺憾將補(bǔ)足
- 三星申請(qǐng)新商標(biāo) 或?qū)⒔oNote 20保護(hù)套添加抗菌涂層
- 昆山書(shū)記杜小剛:對(duì)PCB嚴(yán)控排污 帶領(lǐng)產(chǎn)業(yè)向中高端攀升
- 廣東省電子行業(yè)保持快速發(fā)展,無(wú)人機(jī)產(chǎn)量同比增長(zhǎng)近7成
- 蚌埠市去年累計(jì)投入軍民融合發(fā)展支持資金超過(guò)12億
- 半導(dǎo)體設(shè)備高景氣有望延續(xù) 2018年或迎爆發(fā)
- 中國(guó)大陸海歸人數(shù)突破265萬(wàn)人 博碩士高達(dá)81%
- 電容三點(diǎn)式震蕩電路『緊急求教』
- CCS加載中的一些問(wèn)題的討論
- 渥瑞達(dá)“3G移動(dòng)開(kāi)發(fā)”免費(fèi)試聽(tīng)課于北京交通大學(xué)舉行,歡迎大家光臨!
- CCS4.2 鏈接故障請(qǐng)教
- 網(wǎng)絡(luò)通信---WiFi
- 絕對(duì)笑死人的農(nóng)村標(biāo)語(yǔ)
- 我為BeagleBone Black準(zhǔn)備的顯示屏-你們的發(fā)貨了嗎
- 曬WEBENCH設(shè)計(jì)的過(guò)程+音頻低通濾波器
- 純屬好玩,基于STC51的4位數(shù)碼管驅(qū)動(dòng)模塊







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)