多速率仿真
通常情況下,在Simulink環境下搭建的電力電子控制系統的仿真模型,都是多速率的仿真模型。這是因為:
01
電力電子控制系統中包含多種類型的模型,不同模型對于仿真速率的要求是不同的。
02
被控對象模型中的電氣部分,例如永磁同步電機、逆變器,都是希望仿真速率越快越好。具體選擇多快的仿真速率,與PWM的頻率,逆變器的死區時間,模型的解算方式等因素相關。對于10kHz開關頻率,仿真速率最好是開關頻率的100倍,因此為1MHz(仿真步長1μs),但是如果死區時間為2μs,那么仿真步長最好是死區時間的1/10(0.2μs),此時仿真速率就是5MHz。
03
被控對象模型中的機械部分,通常情況下仿真步長為1ms(仿真速率1kHz),但是在電動汽車的MCU HIL中,為了測試電機的極限速率變化,可能此時電機的機械部分也需要1MHz以上的仿真速率,以保證電機位置和速率的精確模擬。
04
PWM比較器模型部分,通常情況下PWM比較器的三角波都是通過一個高頻率時鐘進行計數來產生的。這個時鐘一般都大于10MHz,以保證PWM輸出占空比的調節精度。
05
控制器模型部分,其仿真速率一般與開關頻率相關,為開關頻率的整數倍。例如開關頻率為10kHz,那么控制器模型的仿真速率可以是10kHz或者20kHz,具體選擇10kHz還是20kHz,就與將來選擇的DSP或者Micro Controller的處理能力相關了。此外,實際應用中,還存在變開關頻率的情況,此時控制器模型的仿真頻率也是變化的。
總之,當我們在Simulink環境下,搭建電力電子控制系統的仿真模型時,需要考慮電力電子系統的實際情況,讓仿真模型的仿真速率是與實際情況相符,這樣仿真結果才能準確反映真實的變化。
如果想要查看Simulink模型中不同模塊的仿真速率,可以點擊Simulink的左側模型的圖標,選擇Colors即可。從下圖的右側可以看到,這個模型有Continuous的部分,也有Discrete的部分(仿真步長200μs)。其他的還有Constant和Multrate(多速率)的部分。

在搭建多速率仿真模型時,不同仿真速率的仿真模型通過Simulink的Rate Transition模塊進行連接,具體的使用請參考MATLAB的Help文件。

Rate Transition模塊
同步和異步
同步和異步是一個相對的概念,例如異步中斷,同步任務等。因此需要弄清楚,相對什么是任務是同步的,相對什么中斷是異步的。還是以永磁同步電機控制系統的仿真模型來說明。
下圖是常規永磁同步電機控制的實際流程包括以下幾個步驟**:**
1 . 采樣和保持電機電流值,ADC轉換電機電流值;
2 . 讀取電機速度和位置值(圖中未標出);
3 . 運行電機控制和SVPWM算法;
4 . 輸出和更新PWM占空比;
其中步驟1的電流采樣和步驟4的更新PWM占空比必須在同一時刻完成的。
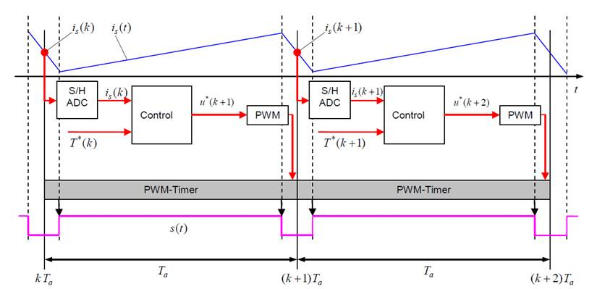
PMSM電機控制的流程
因此我們可以知道,如何把電機控制算法看作一個任務,這個任務相對被控對象模型就是異步的。但是這個任務相對于PWM-Timer卻是同步的。
現在,我們已經知道了永磁同步電機控制系統的實際情況,下面我們就來進行建模。
永磁同步電機控制系統仿真參數
確定系統參數如下:

根據PWM開關頻率和PWM比較器時鐘頻率,可以確定PWM比較器的三角波底點值為0,頂點值約為833。因此確定實際的控制周期為83.3μs,在PWM比較器的三角波的地點和頂點各對永磁電機進行一次控制。
因此確定整個系統仿真模型的仿真參數:
1 . 被控對象的仿真步長為100ns;
2 . PWM比較器的仿真步長為100ns;
3 . 控制器的仿真步長為83.3μs;
控制器仿真模型通過PWM比較器通過異步中斷的方式觸發運行。
永磁同步電機控制系統模型概述
為保證每個控制時刻電流采樣與PWM信號的同步,在模型搭建時可以采用Function Call子系統或者Enable子系統,如下圖所示,此時PMSM Controller的運行不與時間同步,而與PWM比較器輸出的trigger同步(圖中的from模塊的INT標識)
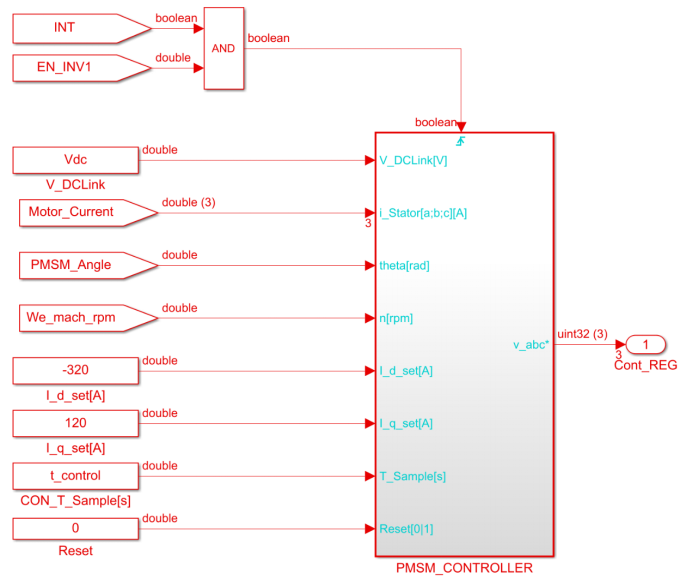
基于Function Call的PMSM控制器模型

PWM比較器產生控制器模型觸發信號
整個系統仿真模型建模完成后,點擊Simulink的左側模型的圖標,選擇Colors,查看Simulink模型中不同模塊的仿真速率。如下圖所示,其中紅色表示仿真步長為0.1μs。粉紅色表示仿真步長為constant(常值),一般為仿真模型一些Constant模塊的仿真步長。最下面青色的就是控制器模型的仿真步長為Triggered,即中斷觸發的運行方式,其中斷源來自D1(即仿真步長為0.1μs的模塊),也是就仿真步長為0.1μs的PWM比較器產生的。
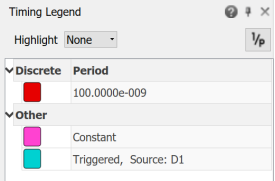
永磁同步電機控制系統仿真模型的仿真步長
各種模式的仿真結果
下面比較定子頻率400Hz下,兩種仿真模式下的仿真結果,讓大家明白其中的差異。
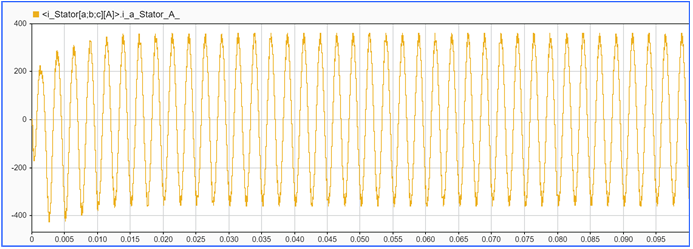
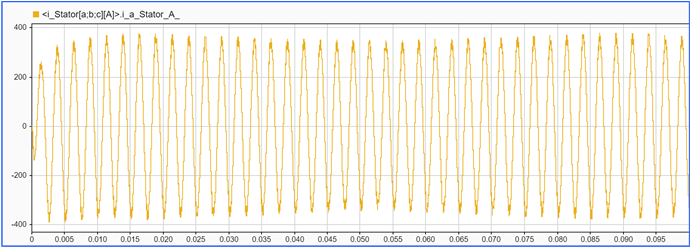
仿真模式1:控制器通過中斷觸發方式運行:電機電流波形(整體)
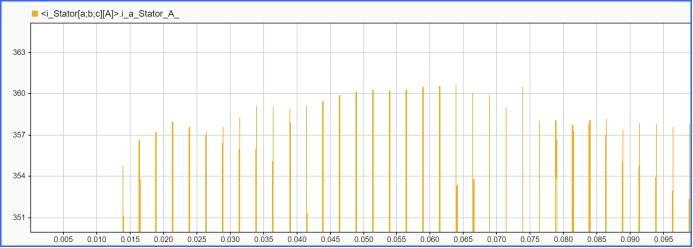
仿真模式1:控制器通過中斷觸發方式運行:電機電流波形(峰值)
仿真模式2:控制器通過非中斷觸發方式運行:電機電流波形(整體)
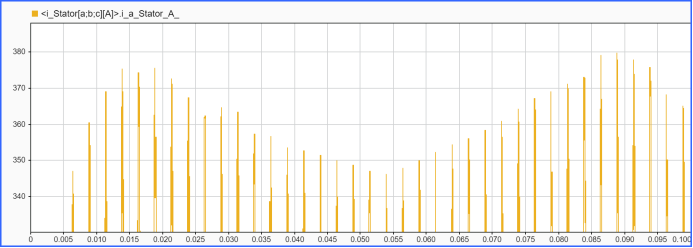
仿真模式2:控制器通過非中斷觸發方式運行:電機電流波形(峰值)
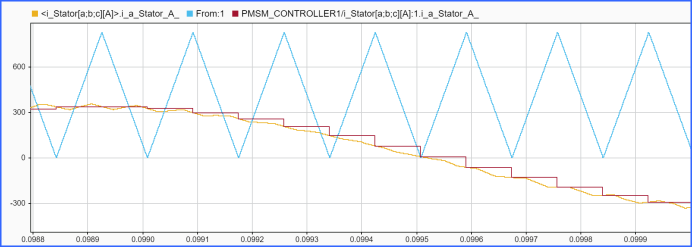
仿真模式1:控制器通過中斷觸發方式運行:電機電流波形,電機電流采樣波形,三角波
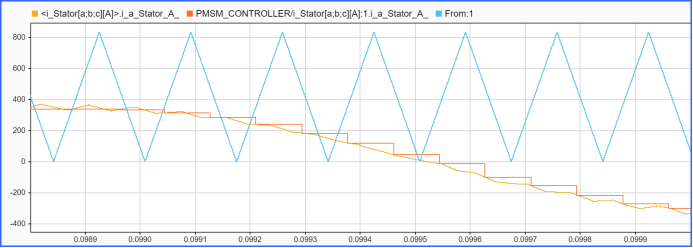
仿真模式2:控制器通過非中斷觸發方式運行:電機電流波形,電機電流采樣波形,三角波
差異如下:
采用中斷觸發方式建模和仿真,電機電流的峰值有大約3A(0.83%)的波動;
采用非中斷觸發方式建模和仿真,電機電流的峰值有35A(9.72%)的低頻波動;
采用中斷觸發方式建模和仿真,電機電流的采樣值在三角波的底點和頂點;
采用非中斷觸發方式建模和仿真,電機電流的采樣值與三角波的底點和頂點無關;
如何大家觀察電機轉矩的波形可以看到更為明顯的低頻波動現象。
留個小問題,大家互動一下:
Q:
為什么采用PWM比較器產生異步中斷來觸發控制器運行的方式,電流峰值的波形比不采用這個方式的波形小很多?
上一篇:主要討論PWM比較器的Simulink模型
下一篇:ABB 整體伺服系統解決方案:E530 伺服驅動器和DSM 伺服電機
推薦閱讀最新更新時間:2025-06-07 23:41

 現代永磁同步電機控制原理及MATLAB仿真 (袁雷編著)
現代永磁同步電機控制原理及MATLAB仿真 (袁雷編著) 全套PCB設計
全套PCB設計













 京公網安備 11010802033920號
京公網安備 11010802033920號