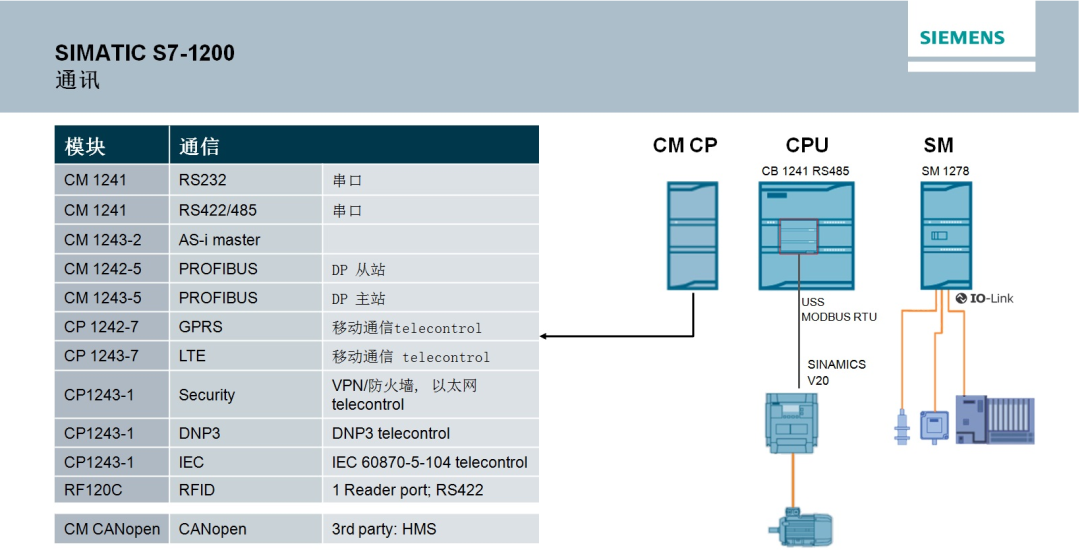
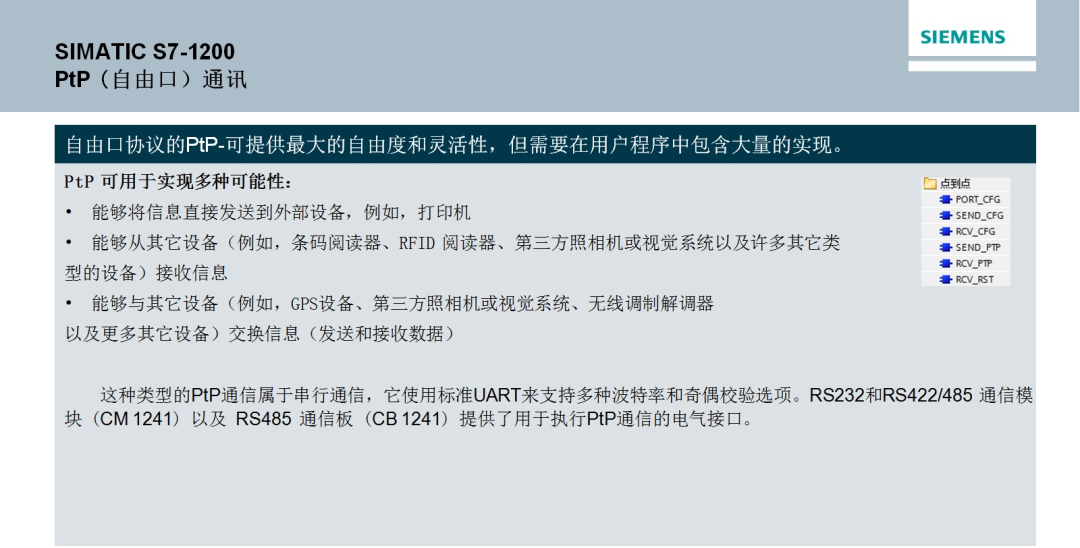
這種類型的PtP通信屬于串行通信,它使用標(biāo)準(zhǔn)UART來支持多種波特率和奇偶校驗選項。RS232 和RS422/485通信模塊(CM1241) 以及RS485通信板(CB 1241)提供了用于執(zhí)行PtP通信的電氣接口。



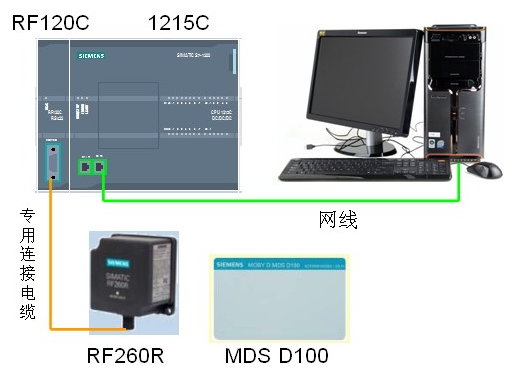
從STEP 7 Basic/Professional V13 SP1 開始,在編程指令,'選件包'中集成了 SIMATIC Ident 配置文件和 Ident 指令塊,使用TIA Portal 進行組態(tài)與編程的 S7-1200/1500 可以使用這些指令對工業(yè)識別系統(tǒng)進行操作。S7-1200 可以使用 RF120C 通信模塊,實現(xiàn)與西門子工業(yè)識別系統(tǒng)的通信。本文介紹通過 S7-1200 CPU 和 RF120C ,使用 Ident 指令塊,實現(xiàn)對 RF200 進行讀、寫操作。
(1)主要硬件設(shè)備:
CPU1215C:6ES7 215-1AG40-0AB0
RF120C:6GT2 002-0LA00
RF260R:6GT2 821-6AC10
MDS D100:6GT2 600-0AD10
RF260R 到 RF120C 連接電纜(2m):6GT2 091-4LH20
(2)軟件環(huán)境:
TIA Portal V13 SP1 Update 4
(3)系統(tǒng)配置:
S7-1200 CPU1215C 通過 RF120C 通信模塊,連接 RF260R 讀寫頭,在 TIA Portal V13 SP1 Update4 軟件環(huán)境下,使用 SIMATIC Ident 指令塊對數(shù)據(jù)載體(MDS D100)進行讀寫操作。系統(tǒng)配置,如圖1所示:
關(guān)鍵字:西門子 S7-1200 串行通信技術(shù)
引用地址:
淺析西門子S7-1200串行通信技術(shù)
推薦閱讀最新更新時間:2025-06-07 23:41
新手快速入門的9個經(jīng)典西門子PLC案例
一、小車往返運動 用S7-200實現(xiàn)小車往返的自動控制 ,控制過程為按下啟動按鈕 ,小車從左邊往右邊(右邊往左邊運動) 當(dāng)運動到右邊(左邊)碰到右邊(左邊)的行程開關(guān)后 小車自動做返回運動,當(dāng)碰到另一邊的行程開關(guān)后又做返回運動 。如此的往返運動,直到當(dāng)按下停車按鈕后小車停止運動。 ▲ 電氣 接線圖 I/O分配表 梯形圖程序 PLC 接線圖 程序調(diào)試及結(jié)果分析 ▲控制平臺操作面板 當(dāng)按下SB2即i0.0(鼠標(biāo)點擊i0.0f)接通后,Q0.0接通,小車右行(即指示 燈 Q0.0 亮)。當(dāng)小車運行碰到右限位開關(guān)SQ2即i0.4(用鼠標(biāo)點擊i0.4f, 模擬 SQ2被壓下)接通,此時小車左行(指示燈Q0.0滅
[嵌入式]

西門子博途PLC:GRAPH順控器調(diào)用實現(xiàn)
調(diào)用 GRAPH FB 下圖顯示了GRAPH FB 的調(diào)用: ① 順控器和各個 參數(shù) 的狀態(tài) 信息 以及各個步和轉(zhuǎn)換條件的狀態(tài)信息都存儲在“GRAPH_Sequence_DB”中。 ② 可使用輸入?yún)?shù)“OFF_SQ” 關(guān)閉 GRAPH 順控器。 關(guān)閉 GRAPH 順控器時,將取消激活所有步。 ③ 可使用輸入?yún)?shù)“INIT_SQ” 激活 GRAPH 順控器的第一步。 在通過此參數(shù)重新激活順控器時,將復(fù)位所有步的執(zhí)行狀態(tài)。 要求 已編寫程序塊“GRAPH_Sequence”并打開組織塊“Main” 。 步驟 要調(diào)用程序塊,請按以下步驟操作: 將 GRAPH FB“GRAPH_Sequence” 拖放到組織塊“Ma
[嵌入式]
西門子S7-1500產(chǎn)生精確時間戳的方法
概述 在數(shù)據(jù)采集時,精準(zhǔn)的相對時間是非常重要的。尤其是高速采集時,上位機的軟件(尤其是windows系統(tǒng)里的軟件)很難精準(zhǔn)地確定信息的時刻。這時候,如果PLC能夠在提供數(shù)據(jù)時,同時提供一個精準(zhǔn)的時間標(biāo)志(時間戳),將能極大地提高數(shù)據(jù)采集的計時準(zhǔn)確性,并降低采集系統(tǒng)的復(fù)雜性。下面將介紹獲取一個精確到微秒的Uint32時間戳的詳細步驟。雖然S7-1500已經(jīng)支持64位的整型,但是,考慮到低端的PLC還不支持64位的整型,因此,此處選擇相對通用的32位無符號整型。PART01完整程序 程序在準(zhǔn)備工作結(jié)束后,進行一次時間戳計算,包括了時鐘獲取、轉(zhuǎn)換等過程。 PART02將時鐘轉(zhuǎn)換成整型數(shù) 首先讀取時鐘,寫入到一個長時間類型LDT,然后
[嵌入式]
西門子PLC模塊的源式和漏式有什么區(qū)別?
問:在使用西門子模塊的時候經(jīng)常遇到有源式和漏式兩種型號的模塊,還有,繼電器型的模塊類型都有什么區(qū)別呢? 答:1、源型(source),電流是從端子流出來的,具PNP晶體管輸出特性;漏型(sink),電流是從端子流進去的,具NPN晶體管輸出特性。 所謂“漏型輸入”,是一種由plc內(nèi)部提供輸入信號源,全部輸入信號的一端匯總到輸入的公共連接端com的輸入形式。又稱為“匯點輸入”。輸入傳感器為接近開關(guān)時,只要接近開關(guān)的輸出驅(qū)動力足夠,漏型輸入的plc輸入端就可以直接與npn集電極開路型接近開關(guān)的輸出進行連接 所謂“源型輸入”,是一種由外部提供輸入信號電源或使用plc內(nèi)部提供給輸入回路的電源,全部輸入信號為“有源
[嵌入式]
盤點:工業(yè)巨頭西門子2017年在華重要布局
根據(jù)財報數(shù)據(jù)展示,2017年 西門子 實現(xiàn)全年營收830億歐元,較2016年增長4.3%,實現(xiàn)營收連續(xù)三年增長。下面就隨工業(yè)控制小編一起來了解一下相關(guān)內(nèi)容吧。 中國地區(qū)業(yè)務(wù)助 西門子 營收增長 根據(jù)財報數(shù)據(jù)展示,2017年 西門子 實現(xiàn)全年營收830億歐元,較2016年增長4.3%,實現(xiàn)營收連續(xù)三年增長。 從營收區(qū)域來看,各地區(qū)增長平穩(wěn),其中中國地區(qū)成為 西門子 亞太、及全球的增長引擎。 從營收業(yè)務(wù)板塊來看,我們更關(guān)注西門子數(shù)字工廠業(yè)務(wù)的變動情況,2017年度,西門子數(shù)字工廠業(yè)務(wù)營收約114億歐元,增長12億歐元,增幅達12%。西門子指出,受益于汽車和機械制造行業(yè)市場表現(xiàn)的改善,支撐了數(shù)
[工業(yè)控制]
西門子設(shè)計了一套尋找停車位的新方法
在德國城市,平均需繞行4.5公里左右才能找到地方停車。德國聯(lián)邦汽車交通局稱,這意味著,一輛每公里排放約140克二氧化碳的普通汽車在尋找停車位的過程中,將不必要地排放至少630克二氧化碳。頻繁地停停走走也會大幅增加排放量。車位不足造成了許多不良后果,譬如,排放尾氣和顆粒物、制造噪音,以及令駕駛員備感沮喪、身心疲憊等。 根據(jù)計算,取決于城市規(guī)模,尋找停車位的車輛約占車流總量的30%。顯然,僅靠新建停車場和提倡騎車是不夠的。2014年,德國的客運交通量比2013年增長了1.4%;據(jù)德國聯(lián)邦交通和數(shù)字基礎(chǔ)設(shè)施部稱,2015年這個數(shù)字還將提高1%。
?
2014年11月在慕尼黑召開的歐洲城市網(wǎng)絡(luò)年會上,出現(xiàn)一個名為“高級停車位
[嵌入式]
如何實現(xiàn)西門子S7-300 PLC與智能流量計的通訊
背景:隨著計算機技術(shù)迅速發(fā)展,石油化工儀表自控系統(tǒng)也逐漸向數(shù)字化、網(wǎng)絡(luò)化、模型化、智能化方向發(fā)展。石化企業(yè)在發(fā)展現(xiàn)有信息系統(tǒng)的基礎(chǔ)上,不斷深化企業(yè)綜合 自動化 系統(tǒng),加強安全 控制系統(tǒng) 的應(yīng)用,提高企業(yè)基礎(chǔ)自動化和先進控制水平,以增強企業(yè)的市場競爭力。本應(yīng)用案例是西門子 S7-300 PLC 與智能流量計通過泗博自動化的Modbus轉(zhuǎn)PROFIBUSD DP網(wǎng)關(guān)在石油化工行業(yè)間的通訊。上海泗博自動化技術(shù)有限公司為該用戶現(xiàn)場提供了一系列的通信解決方案。
本文以智能流量計為例,介紹如何通過上海泗博自動化技術(shù)有限公司的Modbus轉(zhuǎn)PROFIBUS DP網(wǎng)關(guān)PM-160構(gòu)建Modbus從站設(shè)備(各種現(xiàn)場儀表等)與控制設(shè)備PL
[嵌入式]
西門子S7-200和無線數(shù)傳電臺的SCADA系統(tǒng)在水廠中的應(yīng)用
一、概述
某自來水廠控制系統(tǒng)由分布在十幾公里內(nèi)5個深井取水泵站、儲水池、用戶管網(wǎng)組成。整個供水系統(tǒng)的高低落差達150米左右,由于供水系統(tǒng)的組成及地形結(jié)構(gòu)的特殊性,過去人工監(jiān)控,給生產(chǎn)管理、供水調(diào)度帶來諸多不便。
實施了微機監(jiān)控后,它能實時監(jiān)測供水系統(tǒng)的主要工藝參數(shù)(如壓力、流量、水位、電壓、電流等),控制深井泵、監(jiān)視泵機的運行狀態(tài),同時提供生產(chǎn)管理所需的報表、曲線、數(shù)據(jù)查詢等功能。它的運行對供水系統(tǒng)的安全生產(chǎn)、科學(xué)調(diào)度有著重要的意義。
二、系統(tǒng)組成
微機監(jiān)控系統(tǒng)采用主從結(jié)構(gòu)、分布式無線實時監(jiān)控方式(簡稱SCADA),如圖1所示。
系統(tǒng)主要由監(jiān)控中心、無線通信系統(tǒng)、現(xiàn)場監(jiān)控終端、傳感器及儀表四
[電源管理]
 西門子PID用法
西門子PID用法 西門子變頻器一些列圖紙
西門子變頻器一些列圖紙 Unix操作系統(tǒng)設(shè)計
Unix操作系統(tǒng)設(shè)計













 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號