啟動組織塊及其應用
啟動組織塊(Startup)在PLC的工作模式從STOP切換到RUN時執行一次。完成啟動組織塊掃描后,將執行主程序循環組織塊(如OB1)。以下用一個例子說明啟動組織塊的應用。
【例1】編寫一段初始化程序,將CPU 1511C-1PN的MB20~MB23單元清零。
【解】一般初始化程序在CPU一啟動后就運行,所以可以使用OB100組織塊。在TIA博途軟件的項目視圖的項目樹中,雙擊“添加新塊”,彈出如圖1所示的界面,
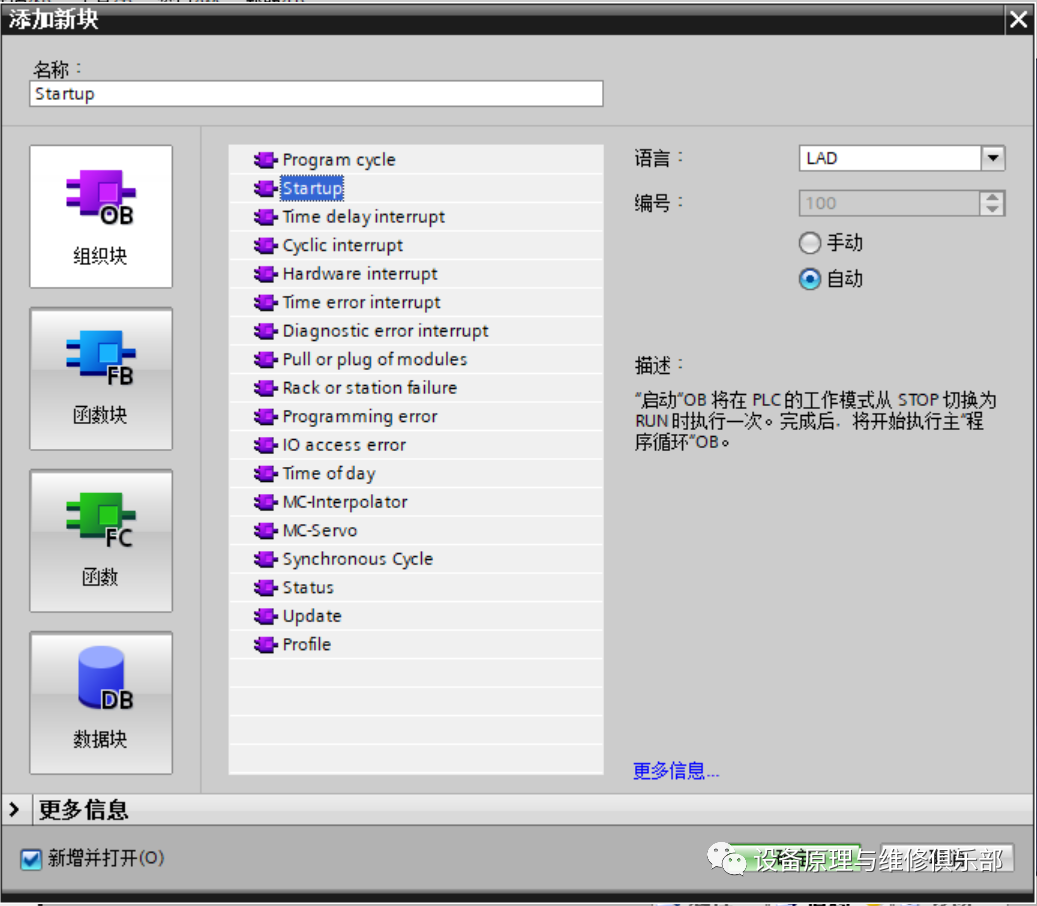
圖1
選中“組織塊”和“Startup”選項,再單擊“確定”按鈕,即可添加啟動組織塊。
MB20~MB23實際上就是MD20,其程序如圖2所示。
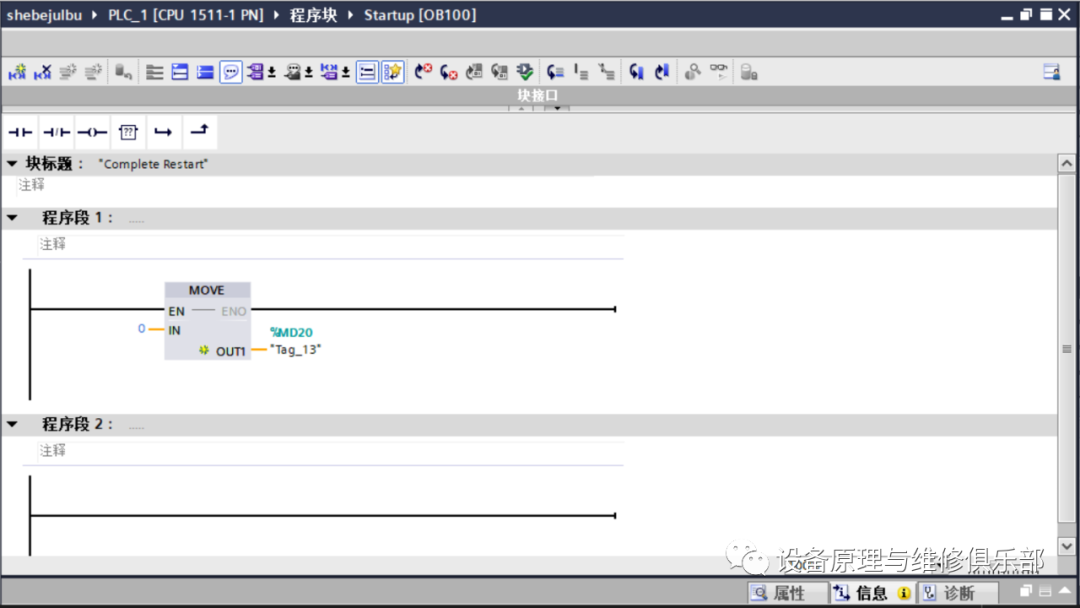
圖2
上一篇:變頻器的分類和發展趨勢
下一篇:通過工業互聯網平臺實現三菱PLC的數據采集和組態監控
推薦閱讀最新更新時間:2025-06-08 20:00
使用SIMATIC S7-1500控制KUKA工業機器人
KUKA Roboter GmbH 提供的 KUKA.PLC mxAutomation 功能包方便用戶使用 SIMATIC 控制器,用 KR C4 控制器中的基本命令和運動命令控制 KUKA 機器人。本應用示例介紹了如何使用 SIMATIC S7-1516 控制機器人,并概要介紹了所含功能塊的用法。 工業機器人越來越受歡迎。目前,這類機器人在機器和工廠中的應用越來越廣泛。其標準化機械系統經過全面開發,并在運動控制方面高度靈活,因此成為了昂貴的專用機械設備的理想選擇。因此無需對機器和工廠進行昂貴的改裝即可實現大批量生產。 不過,工廠控制系統和機器人控制器是兩種截然不同的系統。這兩種控制器之間的通信通常只能以位級別進行,而且機器人的運
[機器人]
智能通訊領先者EtherCAT轉Profinet網關實現PLC驅動器的連接

在工業自動化控制領域,各種協議和標準層出不窮,其中EtherCAT和Profinet是兩種廣泛應用的協議。而如何將這兩種協議進行轉換和連接,成為了工程師們需要解決的問題。今天,我們就來探討一下如何通過開疆智能EtherCAT轉Profinet網關KJ-PN-ECATM連接西門子PLC與凱福科技總線步進驅動器。我們需要了解什么是EtherCAT和Profinet。EtherCAT是一種基于以太網的開發協議,具有高速、高性能和實時性強等特點,廣泛應用于運動控制和自動化設備中。而Profinet則是一種基于工業以太網的通訊標準,具有良好的實時性和兼容性,被廣泛應用于PLC之間的通訊。 如何將這兩種協議進行轉換呢?這就需要用到開疆智能
[嵌入式]
PLC如何跳出金字塔?
隨著 工業 互聯網的蓬勃發展,PLC(可 編程 邏輯 控制器 )作為 工業自動化 的核心組件,正經歷著前所未有的變革。傳統的PLC架構正逐漸被打破,新的演進路徑和未來方向開始浮現。本文將深入探討PLC的三種主要演進路徑,并分析其背后的推動力量和市場趨勢。 從PLC到工業智能控制器:巨頭的革新之路 傳統自動化巨頭如施耐德 電氣 、 西門子 等,正積極推動PLC向工業智能控制器轉型。這些企業推出了具備更強數據處理能力和開放性的新一代PLC 產品 。例如,施耐德的M262控制器能夠直接連接云平臺,實現數據的高效傳輸和處理。 西門子的S7-1500 神經網絡 處理模塊則引入了 人工智能 技術,使機器能夠識別復雜模式并進行預測性
[嵌入式]
PLC驅動接觸器的選擇與限制
PLC(可編程邏輯控制器)是一種用于自動化控制系統的電子設備,用于監控和控制多種工業過程。其中一個常見的應用是控制和驅動接觸器。接觸器是一個電氣開關設備,它通過控制電磁線圈來開關高電流負載。在討論PLC能否直接驅動接觸器之前,我們需要了解接觸器的特點。 接觸器通常由一個電磁線圈和一組觸點組成。當電磁線圈通電時,會產生磁場從而吸引觸點閉合,使電流通過接觸器。相反,當電磁線圈斷電時,接觸器的觸點則會打開,切斷負載電流。接觸器能夠承受高電流負載,因此常用于控制需要處理大功率電路的應用。 1. 直接輸出型PLC:這種PLC通常帶有高功率輸出模塊(通常是繼電器輸出),可以直接驅動接觸器。繼電器輸出模塊通常設計用于承受較高的電流,因此
[嵌入式]
PLC三大量的計算
PLC三大量 PLC中無非就是三大量:開關量、模擬量、脈沖量。只要搞清楚三者之間的關系,你就能熟練的掌握PLC了。 開關量的計算 1、 開關量也稱邏輯量,指僅有兩個取值,0或1、ON或OFF。它是最常用的控制,對它進行控制是PLC的優勢,也是PLC最基本的應用。 開關量控制的目的是,根據開關量的當前輸入組合與歷史的輸入順序,使PLC產生相應的開關量輸出,以使系統能按一定的順序工作。所以,有時也稱其為順序控制。 而順序控制又分為手動、半自動或自動。而采用的控制原則有分散、集中與混合控制三種。 2、 模擬量是指一些連續變化的物理量,如電壓、電流、壓力、速度、流量等。 PLC是由繼電控制引入微處理技術后發展而來的,可方便及可靠地用于
[嵌入式]
S7-1200 PLC之間的以太網通信實現方案
一.通信前的準備 首先創建新項目,并命名為“s7-1200之間通信”,如下圖所示: 然后組態設備,選擇s7-1200的CPU 1214C DC/DC/RLY,版本號為4.1,如下圖所示: 打開項目后,選中PLC_1設備視圖,選擇下面的“屬性”選項,再選擇“系統和時鐘存儲器”,在右邊的顯示出的啟用時鐘存儲器字節的復選框中打上勾,如下圖所示: 再選中PLC_1設備中以太網口,在以太網地址設置PLC_1的IP地址為:192.168.0.1,如下圖所示: 然后把PLC_1復制粘貼成PLC_2,同樣地在以太網口那里設置PLC_2的IP地址為:192.168.0.2,之前的系統和時鐘存儲器已經設置好了,PLC_2不用再設了。具
[嵌入式]
利用UBIQUITY路由器實現對PLC的遠程控制——以西門子S7-1200為例
隨著各種工業協議的發展,各個工廠將面臨著需要實現多種不同協議以及設備互聯的挑戰,其中也包含傳統的機器設備。為了能夠順應物聯網的發展,大幅提高效率,降低成本和資源消耗,并最終實現將傳統工業提升到智能化的新階段,如何有效連接和管理在各個現場的眾多設備成為許多業內人士十分關注的問題。 PLC數據通訊通常都是采用有線的方式進行的,如果距離較遠,將會帶來布線困難等麻煩。為解決這個問題,虹科聯合著名工控廠家ASEM為國內用戶推出了一款新的解決方案,即利用UBIQUITY路由器在全球范圍內遠程實現PLC與電腦編程軟件的無線通訊、PLC與電腦組態軟件的無線通訊、PLC與人機界面觸摸屏的無線通訊。 虹科UBIQUITY解決方案 UBIQUI
[嵌入式]
西門子plc工業通信網絡應用案例解析
強大的工業通信網絡與信息技術的徹底結合改變了傳統的信息管理方式,建企業的生產管理帶入到一個全新的境界。 一般而言,企業的通信網絡可劃分為3級,及企業級、車間級和現場級。 在應用較多的西門子工業通信網絡解決方案的范疇內使用了許多通信技術。在通信、組態、編程中,除了上圖中提到的工業以太網和 PROFIBUS之外,還需要使用其他一些通信技術。 下面對 SIMATIC NET逐一進行簡要介紹。 1)、MPI(Multi- Point Interface,多點接口)協議 MPl通信用于小范圍、小點數的現場級通信。MPI是為S7/M7和C7 PLC 系統提供的多點接口,它設計用于可編程序設備的接口,也可以用來在少數CPU之間傳
[嵌入式]
 臺達函數庫
臺達函數庫 中型PLC編程手冊(運動控制篇)
中型PLC編程手冊(運動控制篇) Unix操作系統設計
Unix操作系統設計
小廣播
熱門活動
換一批
更多
最新嵌入式文章

更多開源項目推薦
- 使用 IXYS 的 MX878R 的參考設計
- RT8010A 1.5MHz、1A、高效PWM降壓DC/DC轉換器的典型應用,適用于固定電壓調節器
- DN05053/D、NCP1129、12 瓦、離線降壓穩壓器設計說明
- OP113ESZ耳機放大器多媒體聲音編解碼器典型應用
- 麥克風聲控模塊
- HV257DB1,基于HV257的高壓采樣保持陣列演示板
- 【藍橋杯練習題二】第十三屆藍橋杯EDA賽模擬題
- 基于stm32與paj7620u2傳感器的手勢識別模塊
- AVR2037,使用ADXL335加速度計的按鍵遙控(Key Remote)板
- NSV45015WT1G 用于基本交流應用的恒流 LED 驅動器的典型應用
更多精選電路圖






更多熱門文章
更多每日新聞
06月08日歷史上的今天
廠商技術中心







 京公網安備 11010802033920號
京公網安備 11010802033920號