大家好,本人也是最近才開始接觸STM32Cube,它極大的提高了軟件開發(fā)的速度。
閑話少說,切入正題。本人使用的芯片是STM32L151C8T6一款低功耗的芯片。前提條件是:已知外來傳感器PWM波周期是1S,通過低電平脈寬來發(fā)送有效數(shù)據(jù),我們使用PWM捕獲,將低電平時間顯示在串口調(diào)試助手。所使用的管腳配置圖如下:
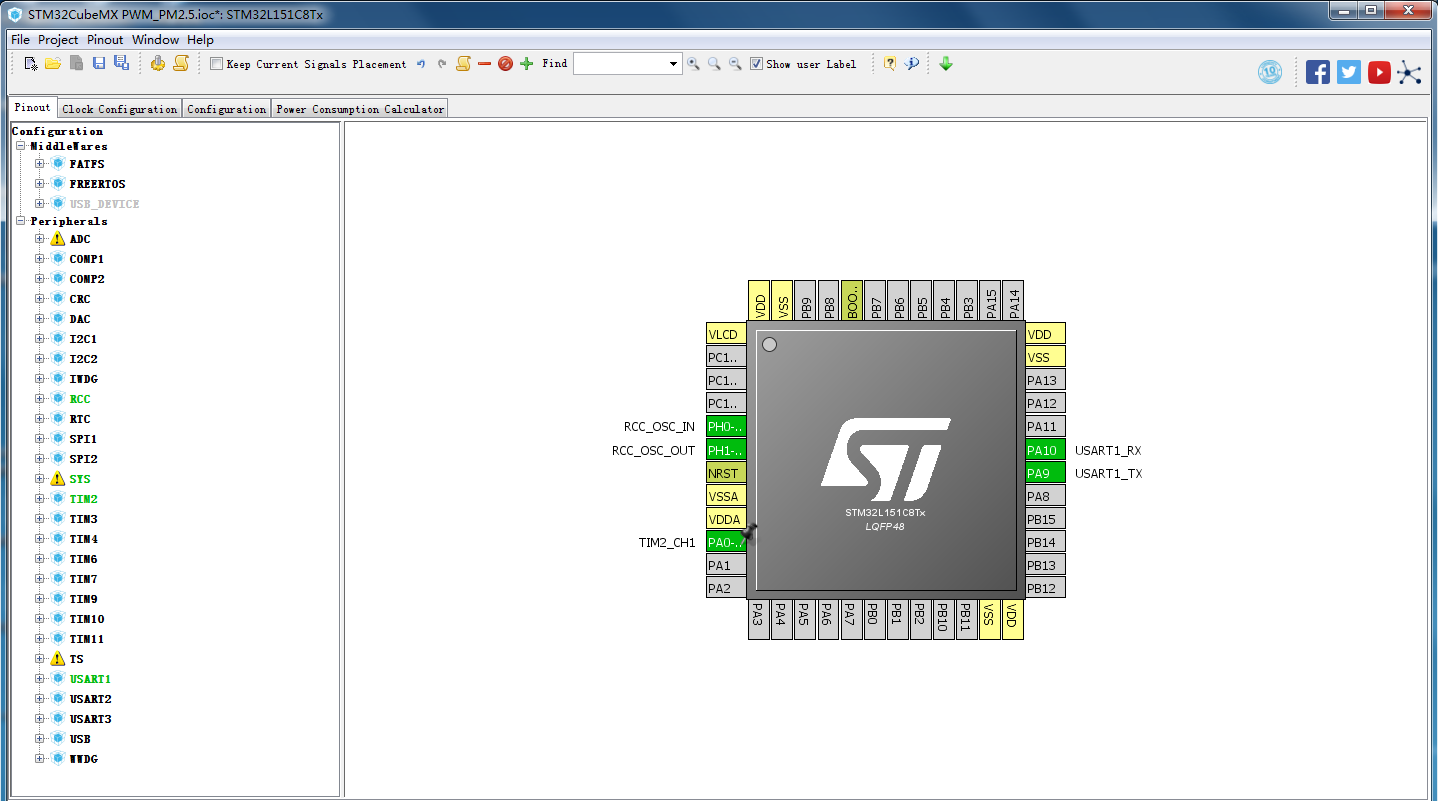
接下來本人將詳細的操作順序一步一步給出,方便初學者學習。
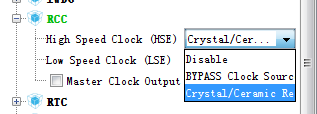
1.配置RCC時鐘,本人使用外部高速時鐘,如下圖。
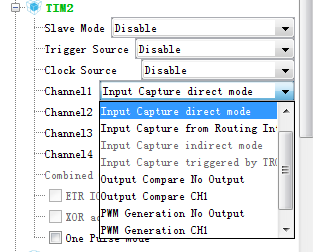
2.配置PWM輸入捕獲通道,這里本人采用到的是TIM2CH1(這個根據(jù)自己MCU情況設定,沒有太多要求),如下圖:
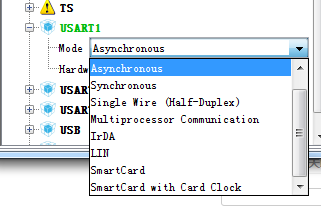
3.配置串口輸出,這里我們只是用到了RX,如下圖:
4.配置時鐘樹,這里只需要配置兩個參數(shù)即可,然后回車(至于時鐘樹怎么配置這里忽略,不做詳細介紹,網(wǎng)上資料一大堆)
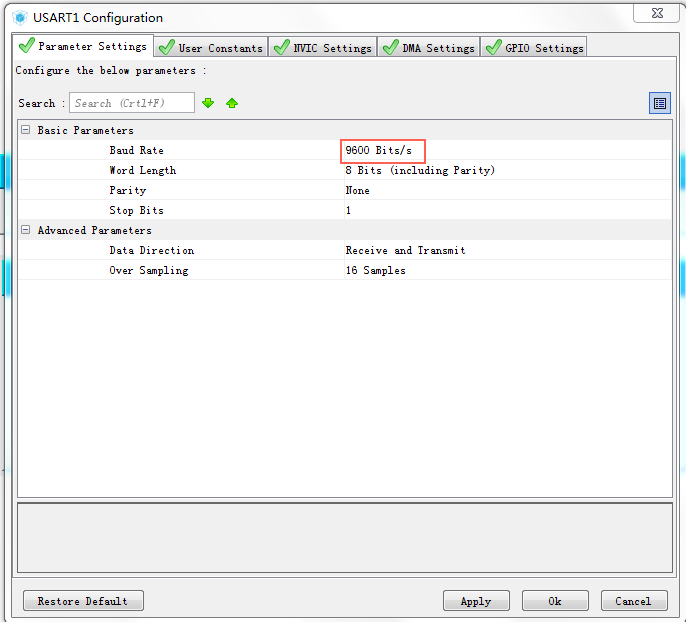
6.根據(jù)需要配置自己串口的波特率,這里我設置的事9600,當然常見和默認是115200.
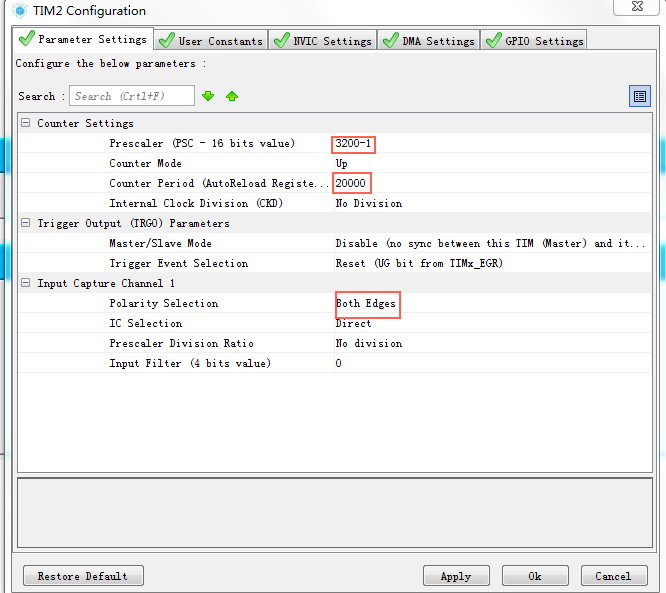
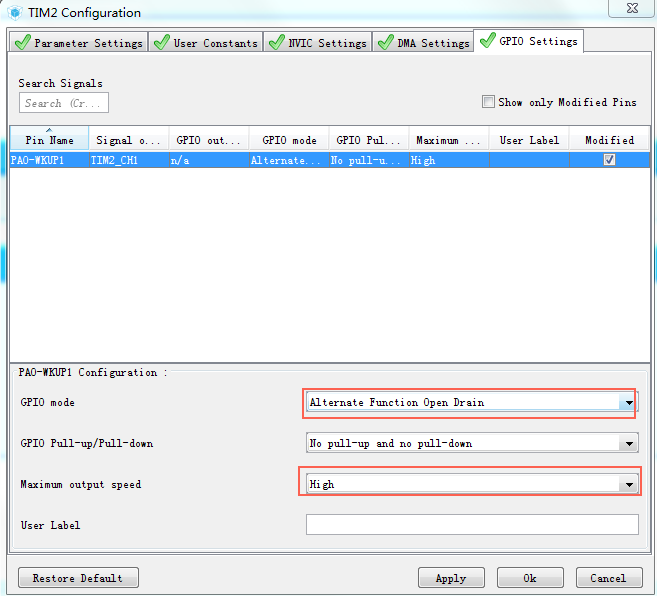
7.定時器2配置,這里系統(tǒng)時鐘是32MHZ,3200進行分頻后是10KHZ,也就是說計數(shù)10000次就是1S。這里我設定了20000,也就是計數(shù)2S肯定能捕獲1S周期的PWM。并在GPIO下進行如下設置。至此,配置過程結(jié)束,打開代碼。
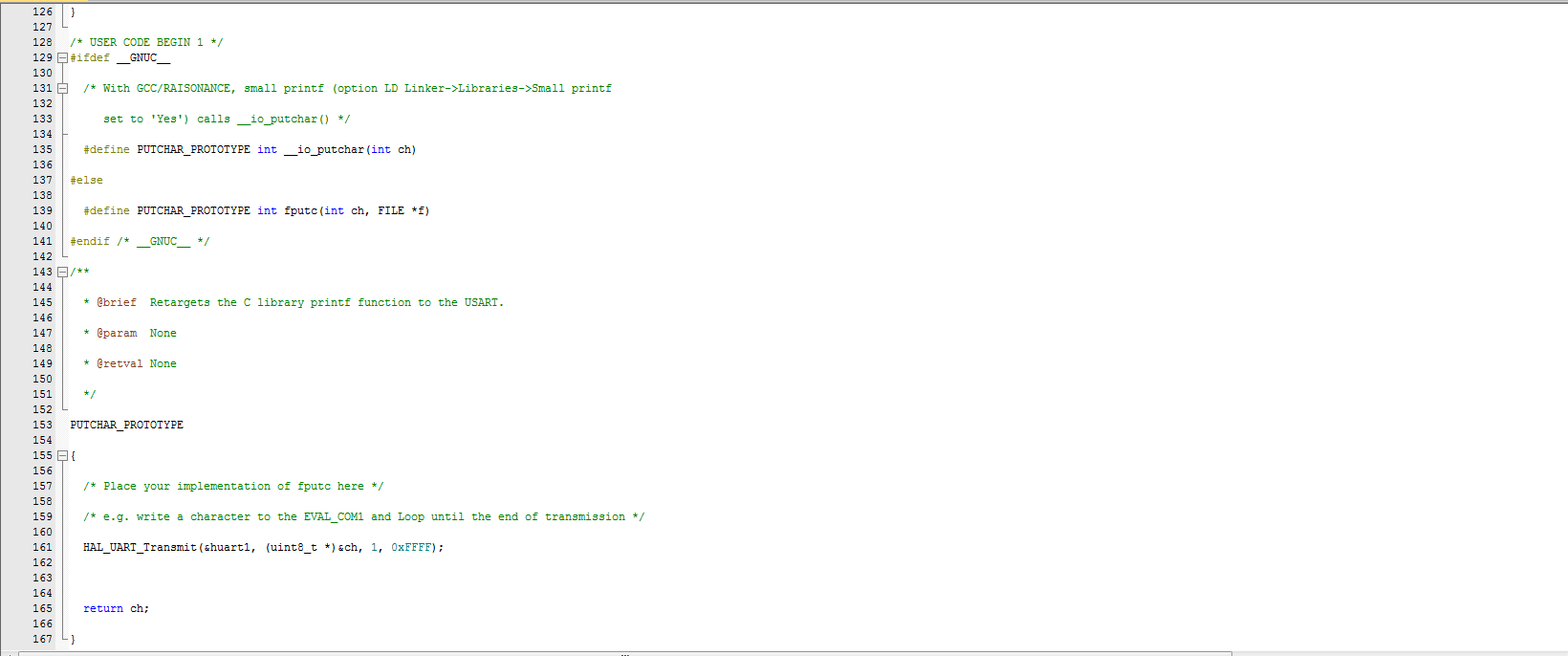
8.在打開工程下,本人將一一介紹變動的程序,沒有作變動的,不做任何介紹。在串口.C文件最后面添加打印映射函數(shù),也就是下圖這一段代碼:
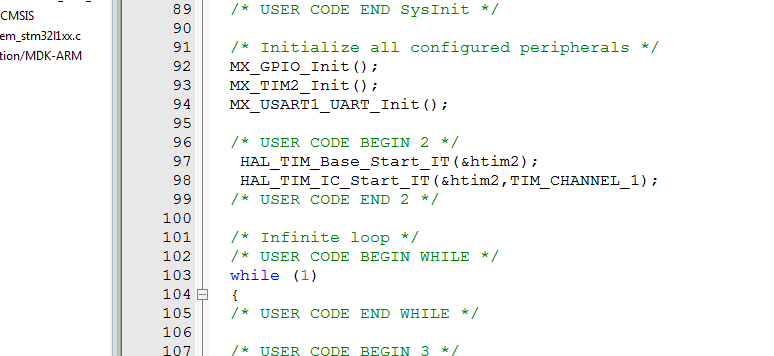
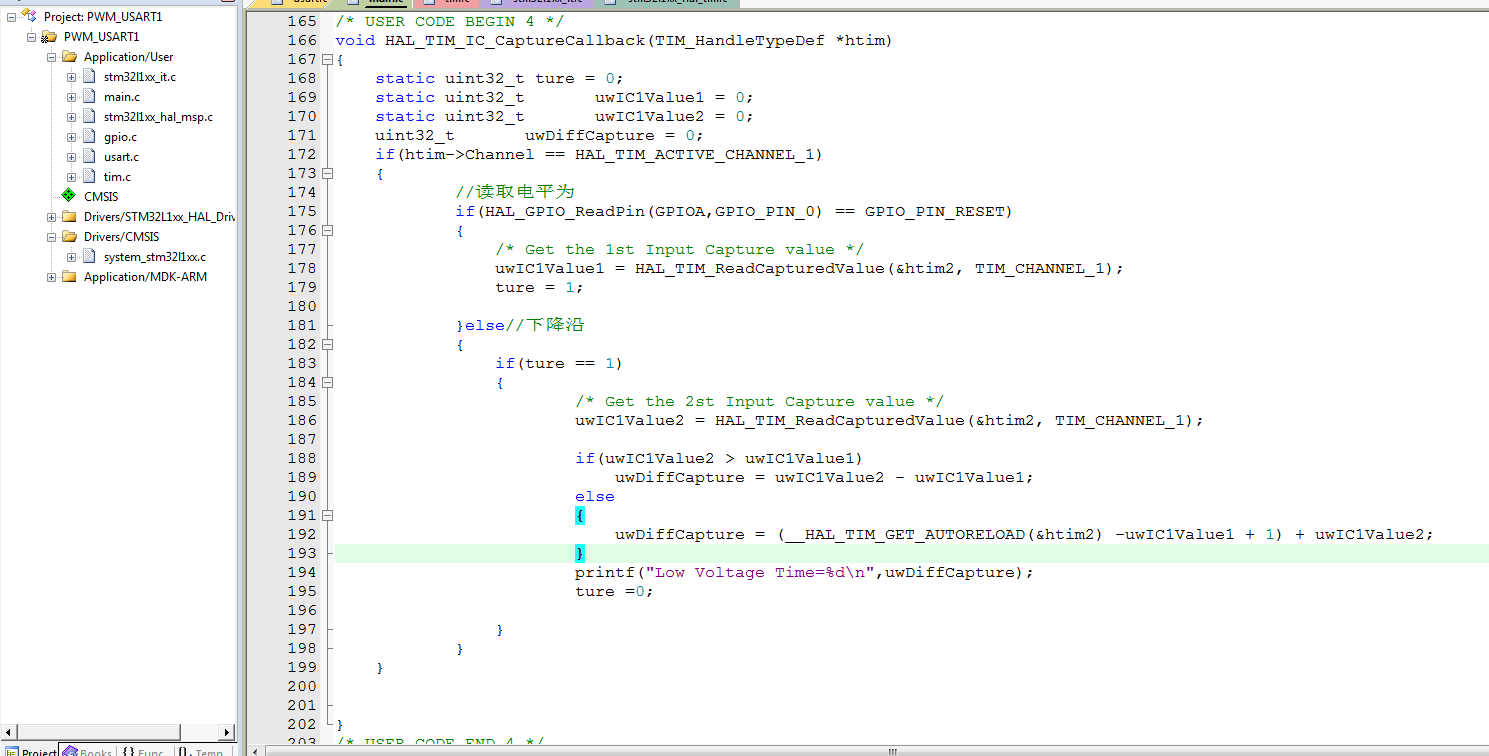
9.在初始化程序中添加HAL_TIM_IC_Start(&htim2, TIM_CHANNEL_1);和 HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1); 在main.c后面添加下圖所示的回調(diào)函數(shù)。
10,編譯,下載之后在串口調(diào)試助手上面顯示如下:

上一篇:Key按鍵中斷之STM32CubeMX 生成和代碼編寫
下一篇:STM32CubeMX學習筆記1:GPIO輸出LED流水燈
推薦閱讀
史海拾趣
在半導體行業(yè)快速發(fā)展的同時,環(huán)保問題也日益受到關(guān)注。Concord Semiconductor Corp積極響應環(huán)保號召,將綠色發(fā)展理念融入企業(yè)的生產(chǎn)經(jīng)營活動中。公司采用環(huán)保材料和工藝,加強廢棄物的處理和回收利用,努力實現(xiàn)綠色生產(chǎn)。這一舉措不僅提升了公司的社會形象,也為公司的長期發(fā)展奠定了堅實基礎(chǔ)。
請注意,這些故事均基于電子行業(yè)的一般情況和趨勢虛構(gòu)而成,并非針對任何實際存在的公司。如果需要更具體或更貼近實際的故事,建議參考相關(guān)公司的官方資料或行業(yè)報告。
Ferraz Shawmut一直致力于技術(shù)創(chuàng)新和產(chǎn)品研發(fā)。通過不斷的技術(shù)創(chuàng)新,公司推出了多款具有競爭力的電氣保護產(chǎn)品,如熔斷器、保險絲等。同時,公司也積極拓展全球市場,目前在全球擁有60個下屬企業(yè),6200名雇員,產(chǎn)品遠銷世界各地。
隨著中國市場的崛起,ETERNA開始將目光投向了亞洲市場。2011年,中國從德國保時捷家族手中接過ETERNA的旗幟,開始在全球大力拓展ETERNA品牌。在中國市場的推動下,ETERNA的知名度和影響力不斷提升。同時,公司還加強了與其他國家和地區(qū)的合作與交流,通過參加國際展會和舉辦品牌活動等方式,進一步擴大了品牌影響力。這些努力使ETERNA在全球電子行業(yè)中逐漸嶄露頭角,成為了一個備受矚目的品牌。
在電子行業(yè)快速發(fā)展的背景下,Cermetek Microelectronics公司深知創(chuàng)新的重要性。公司不斷加大對研發(fā)的投入,引進先進的研發(fā)設備和人才,持續(xù)推出具有創(chuàng)新性的微電子產(chǎn)品。這些新產(chǎn)品不僅具有更高的性能和更低的功耗,還更加符合市場需求,為公司帶來了更多的商業(yè)機會。
在電子元件領(lǐng)域,F(xiàn)rolyt Condensers & Elements GmbH起初是一家專注于電容器研發(fā)的小型制造商。2005年,公司研發(fā)團隊成功開發(fā)出一種新型高性能鋁電解電容器,該電容器在耐高溫、長壽命和低阻抗方面表現(xiàn)出色,迅速吸引了市場的關(guān)注。通過持續(xù)的技術(shù)創(chuàng)新和嚴格的品質(zhì)控制,F(xiàn)rolyt的電容器產(chǎn)品在汽車電子、通信設備等多個領(lǐng)域得到廣泛應用,公司因此實現(xiàn)了市場份額的快速增長。
為了適應全球化的市場趨勢,茂達電子制定了全面的全球化戰(zhàn)略。公司不僅加強了與國際市場的聯(lián)系,還積極尋求與國際知名企業(yè)的合作機會。同時,茂達電子還加大了對海外市場的投入,通過設立海外分支機構(gòu)、參加國際展會等方式,不斷提升品牌知名度和市場影響力。
這五個故事只是Anpec(茂達電子)發(fā)展歷程中的一部分,但它們充分展示了茂達電子在電子行業(yè)中的崛起和成就。作為一家具有創(chuàng)新精神和市場洞察力的企業(yè),茂達電子將繼續(xù)致力于為客戶提供優(yōu)質(zhì)的產(chǎn)品和服務,推動電子行業(yè)的持續(xù)發(fā)展。
|
對于工程師來說,尤其是北美的工程師,現(xiàn)在的情況還是相當讓他們滿意的,至少基于EE Tims的對于工程師薪金和工作狀況的年度調(diào)查的結(jié)果是這樣的。 基于大約1600份調(diào)查問卷的統(tǒng)計,在美國2007年工程師的平均年薪包括福利總數(shù)為108800美元,略高于去年 ...… 查看全部問答∨ |
在今天各類制造廠正在持續(xù)地將服務范圍從與用戶協(xié)商轉(zhuǎn)向交鑰匙工程全程承包。用戶則把更多的精力集中在提高核心競爭力,而把自動化和控制的功能委托給自動化的供應商。這就創(chuàng)造了對服務和支持的更大需求,而PAC的多功能、多專業(yè)的能力正是可利用和 ...… 查看全部問答∨ |
|
我用的是周立功的EasyFPGA030,它只支持并口下載的,但是現(xiàn)在手上沒有并口的下載線,我的筆記本上也沒有,同學也沒有!!難道又要花幾十甚至幾百去買個并口下載線,望高手指點!!!!!!!!!… 查看全部問答∨ |
各位高人: 我現(xiàn)在選用了一個直線位移傳感器PY2系列的 它上面寫的參數(shù)是無限分辨率 位移速度是10m/s 如果我希望測量的位移精度達到0.1mm 怎樣從這兩個參數(shù)中,判斷是否滿 ...… 查看全部問答∨ |
|
linux-2.6.18內(nèi)核移植及根文件系統(tǒng)的制做(簡易) linux-2.6.18內(nèi)核移植及根文件系統(tǒng)的制做(簡易) 一、 去 http://www.kernel.org 下載內(nèi)核,下面以 linux-2.6.18.tar.bz2 為例。 [root@Binnary ~ ]# tar –jxvf linux-2.6.18.tar.bz2 & ...… 查看全部問答∨ |
|
|
#include #define uint unsigned int #define uchar unsigned char sbit duan=P2^6; //申明U1鎖存器的鎖存端 sbit wei=P2^7; //申U2鎖存器的鎖存端 void ...… 查看全部問答∨ |

設計資源 培訓 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析

- 意法半導體推出用于匹配遠距離無線微控制器STM32WL33的集成的匹配濾波芯片
- ESP32開發(fā)板連接TFT顯示屏ST7789跳坑記
- 如何讓ESP32支持analogWrite函數(shù)
- LGVL配合FreeType為可變字體設置字重-ESP32篇
- 使用樹莓派進行 ESP32 Jtag 調(diào)試
- ESP32怎么在SPIFFS里面存儲html,css,js文件,以及網(wǎng)頁和arduino的通訊
- ESP32 freeRTOS使用測試
- API調(diào)用小記(Touchdesigner和ESP32)
- 關(guān)于ESP32/8266使用async-mqtt-client庫的一些基本介紹







 FDC15-24S12
FDC15-24S12- 座椅、天窗、電動尾門應用 國產(chǎn)車規(guī)級高壓霍爾效應傳感器推薦
- 突發(fā)!又一車企車機“崩了”
- 寧德時代為陳立泉院士頒發(fā)“卓越貢獻獎”
- 一文速覽吉利雷神 AI 電混 2.0 發(fā)布會重點
- 2025年1-4月ADAS供應商裝機量排行榜:頭部集中與國產(chǎn)突圍并存
- 國內(nèi)飛行汽車無線通信測試成功,通信安全新突破
- SPAD席卷車載激光雷達市場
- 大聯(lián)大品佳集團推出基于Microchip和ams OSRAM產(chǎn)品的10Base-T1S萬級像素大燈方案
- 哈曼推出采用三星Neo QLED技術(shù)的全新顯示屏
- Syntiant推出超低功耗汽車AI創(chuàng)新技術(shù) 提升車輛安全性和用戶體驗
- 答題抽獎:Mentor Tessent Automotive相關(guān)測試解決方案(獎品池還剩不少獎品喲)
- Mouser&TE直播:解鎖智能家居部件新技術(shù),探索連接黑科技
- 全球首款Cortex-M23內(nèi)核物聯(lián)網(wǎng)芯片SAML10和SAM L11系列 闖關(guān)獲取SAML10/SAML11法寶,拆除電子界安全危機,贏好禮!
- 有獎電源設計問卷調(diào)查
- 直播已結(jié)束【用于光伏逆變器/儲能系統(tǒng)的歐姆龍繼電器 /開關(guān)/連接器解決方案】
- 【搶樓贏禮】聊聊我用過的MOSFET!
- 【已結(jié)束】有獎直播【TI 全新CC2340無線 MCU,助力低功耗藍牙應用】
- 羅姆有獎直播 | 高輸出功率激光二極管—助力激光雷達性能提升
- 有獎評測:50套來自恩智浦全新快速物聯(lián)網(wǎng)原型設計套件(價值350元)
- 您的電路保護有足夠的空間嗎?Littelfuse的881系列保險絲迎接這一挑戰(zhàn)







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號