我們需要準備的資料:
1.開發板使用的是 i.MX6ULL 終結者,開發板里面是 Yocto 文件系統。
2.使用 Ubuntu16.04
3.提供 opencv 源碼“opencv-3.4.1.zip”
4.QT 測試例程
86.1 安裝交叉編譯工具
移植的 QT 系統需要的交叉編譯器就是我們編譯 qt 的編譯器,因為我們是 Yocto 系統,所以我們用編譯 Yocto 的編譯器來編譯 OpenCV。交叉編譯器為:gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf。設置交叉編譯器請參考 i.MX6ULL 終結者-開發板使用手冊 4.3 章節 搭建交叉編譯環境。
86.2 搭建 OpenCV 的編譯環境
1.在 Ubuntu 新建一個 opencv 文件夾。將迅為提供的 opencv-3.4.1 源碼壓縮包復制到 opencv 這個目錄,解壓。然后再 opencv 目錄下新建 install,build 文件夾。build 文件夾是構建目錄 ,install 文件夾是安裝目錄。如圖 86.2.1 所示:
2.安裝 cmake 和 cmake-gui 工具
sudo apt-get install cmake cmake-qt-gui cmake-curses-gui
安裝完成提示安裝成功,作者是已經安裝過了,如圖 86.2.3 所示:
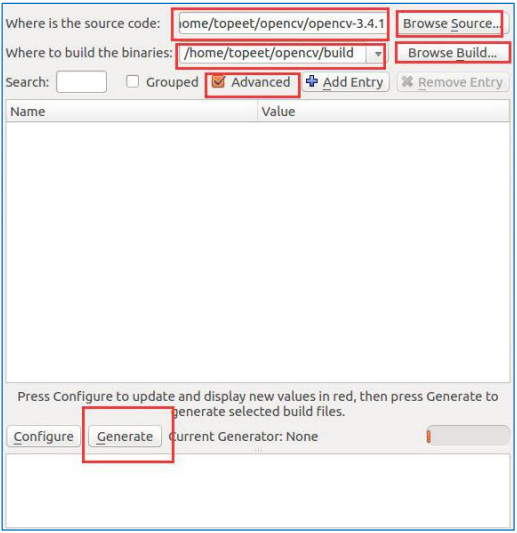
3.進入 build 目錄下,執行指令 cmake-gui,開始配置 OpenCV 的環境執行完成后會出現圖形化工具cmake-gui。指定我們源碼的所在路徑和構建目錄。勾選 Advanced,再點擊 Configure 或者 Generate。
4.選擇 Unix Makefiles,然后選擇 Specify options for cross-compiling,再點擊 Next。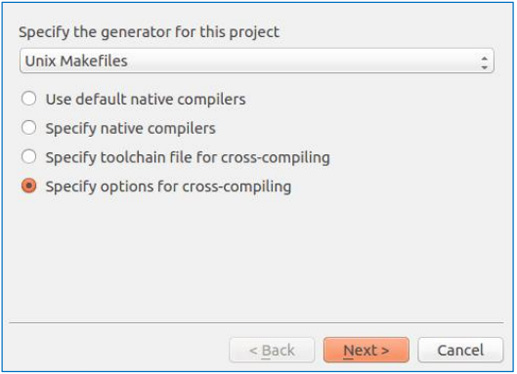
5.填寫交叉編譯器的路徑,注意紅色部分請填寫自己的交叉編譯器路徑。
Operation System:topeet
Compilers C:
/usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc
Compilers C++:
/usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-g++
Targer Root:/usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/arm-linux-gnueabihf/bin
指定交叉編譯工具的具體路徑,按個人路徑指定,其他按圖所示填寫,如圖 86.2.7 所示。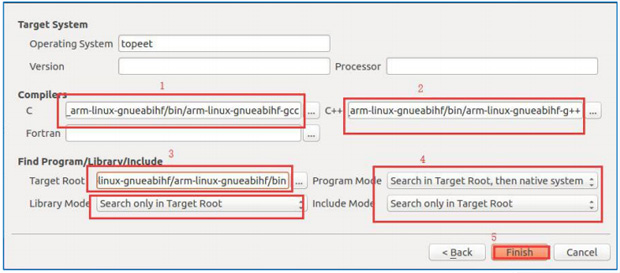
6. 我們還需要配置一些信息,點擊如下圖 CMAKE 處,在 CMAKE_EXE_LINKER_FLAGS 處添加上-lpthread -lrt -ldl。添加這些是指定依賴庫的鏈接參數。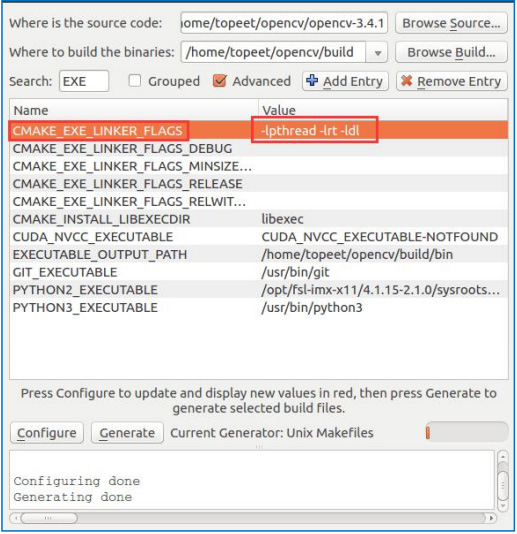
7.再在 CMAKE_INSTALL_PREFIX 處指定安裝目錄,我們在上面已經新建了 install 安裝目錄。我們直接指定到該目錄即可。如果不指定,它會默認安裝到 Ubuntu 系統目錄/usr/local 下。這樣會直接替換我們/usr/local 下的庫。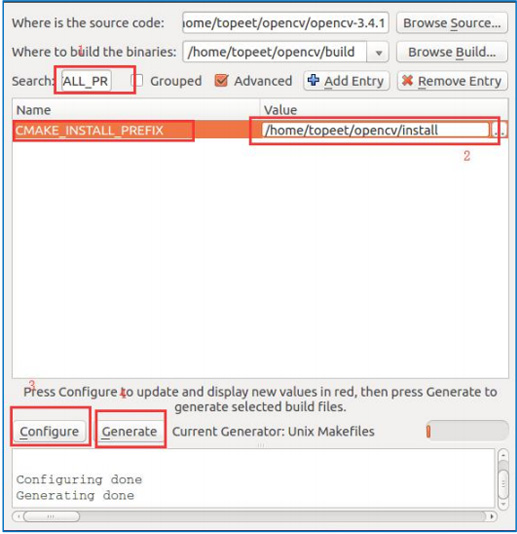
8.至此我們配置完,現在我們需要生成 Makefile 等文件,我們先點擊 Configure,再點擊 Generat 就可以生成了。點擊了 Generate 后看到信息像如圖 86.2.10 一樣,表明生成成功。若出現報錯,請根據對話框里的內容指定的文件去自行去檢查錯誤!一般都是交叉編譯器路徑不對造成的。配置完成生成文件后,我
們點擊左上角關閉這個圖形化配置界面即可。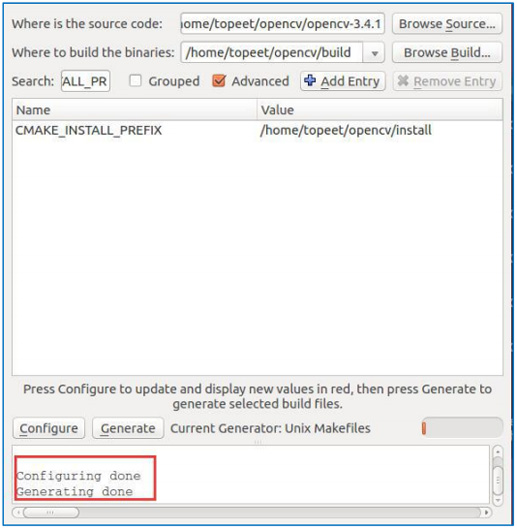
上一篇:嵌入式學習篇丨迅為4412開發板Android4.4系統編譯
下一篇:迅為IMX6ULL開發板交叉編譯器的安裝和使用
推薦閱讀最新更新時間:2025-07-08 12:05

 【Follow me第三季第1期】+項目代碼
【Follow me第三季第1期】+項目代碼 白話C++之練功
白話C++之練功 TLC279MJB
TLC279MJB設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析















 京公網安備 11010802033920號
京公網安備 11010802033920號