在第一章中,介紹了迅為4412 的 iROM、啟動(dòng)方式、源碼組成等;在第二章中,介紹uboot 編譯等。通過前面對(duì)編譯的詳細(xì)分析,了解到 uboot 源碼中有以下幾個(gè)文件是非常重要的:
“cpu/arm_cortexa9/start.S”
“board/samsung/smdkc210/lowlevel_init_SCP.S 或者 lowlevel_init_POP.S”
“include/configs/itop_4412_android.h 或者 itop_4412_ubuntu.h”
其中“cpu/arm_cortexa9/start.S”是 uboot 代碼入口文件,分析 uboot 一般是從
“start.S”文件開始,“l(fā)owlevel_init_SCP.S”文件是內(nèi)存初始化、時(shí)鐘初始化和串口初始化
等的文件,start.S 文件在運(yùn)行過程中會(huì)跳到這個(gè)文件中。
“itop_4412_android.h 或者 itop_4412_ubuntu.h”文件是重要的配置頭文件,里面的
宏配置,會(huì)影響以上文件如何編譯和運(yùn)行,包括在下一章節(jié)中 uboot 源碼的 C 語言部分,很
多代碼編譯和運(yùn)行都會(huì)受到這個(gè)頭文件的影響。
本章主要內(nèi)容是,從“start.S”文件開始分析所有匯編代碼,截止于 uboot 開始執(zhí)行 C代碼。其中涉及到很多不常用概念,需要我們?nèi)チ私夂驼莆眨簧婕暗絽R編語法,需要我們?nèi)チ私狻?br/>
3.1 分析 uboot 匯編源碼必要的知識(shí)和學(xué)習(xí)方法匯總
本小節(jié),結(jié)合 datasheet 介紹 4412 的物理地址概念,這部分和單片機(jī)中類似;介紹匯編語法如何學(xué)習(xí)以及要掌握到什么程度;匯編部分調(diào)試方法。
3.1.1 4412 的物理地址和虛擬地址介紹
如果用戶學(xué)習(xí)過迅為的 linux 驅(qū)動(dòng)教程,其中有一期,專門介紹物理地址和虛擬地址的概念。幾乎在所有現(xiàn)代操作系統(tǒng)中,物理地址都是通過 MMU(內(nèi)存管理單元)映射為虛擬地址。但是在 uboot 匯編部分,還是直接操作物理地址的。
物理地址的概念。
MPU 地址總線傳來的地址,由硬件電路控制其具體含義。物理地址中很大一部分是留給內(nèi)存條中的內(nèi)存的。物理地址空間,一部分給內(nèi)存用,一部分給總線用,這是由硬件設(shè)計(jì)來決定的,因此在 32 bits 地址線的處理器中,物理地址空間是 2 的 32 次方,即 4GB,但物理RAM 一般不能上到 4GB,因?yàn)檫€有一部分要給總線用(總線上還掛著別的許多設(shè)備)。
對(duì)于有單片機(jī)基礎(chǔ)的用戶來說,物理地址還是比較好理解,例如在 51 單片機(jī)中,P0.0 表示小燈的輸出寄存器,給這個(gè)寄存器寫 1 小燈滅,寫 0 小燈亮,寄存器 P0.0 的地址就是物理地址。
P0 = 0xfe;//小燈亮
P0 = 0xff;//小燈滅
P0 在 51 寄存器頭文件中,有一個(gè)宏定義它的實(shí)際地址,也就是物理地址。
在 4412 中,物理地址太多了,根本沒有辦法全部介紹,2000 多頁的 datasheet 中大部分都是介紹寄存器,一個(gè)一個(gè)介紹是無法實(shí)現(xiàn)的。但是我們有必要掌握和理解其中的寄
存器框架和典型寄存器。
在 4412datasheet 第三章“Memory Map”中,如下圖所示,這是 4412 全部基地址的描述。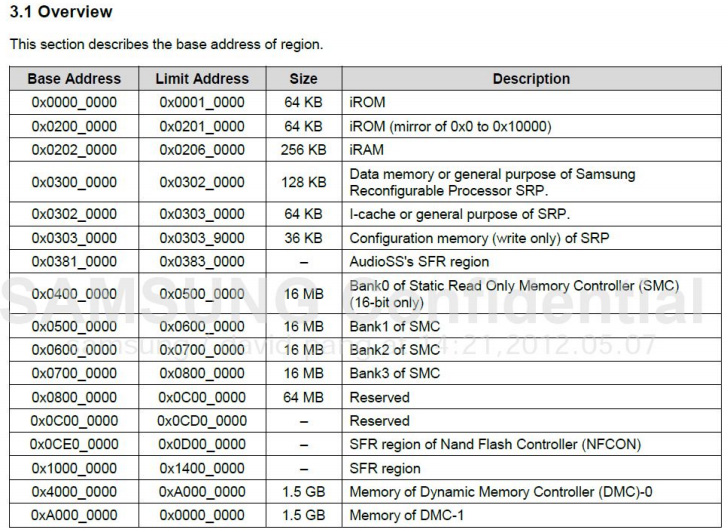
注意上表中,0x4000_0000~0xA000_0000,0xA000_0000~0x0000_0000 這兩個(gè)地址區(qū)間,這兩個(gè)區(qū)間是 DMC 內(nèi)存控制器的尋址地址,也就是內(nèi)存的物理地址。實(shí)際上 4412 最大支持的內(nèi)存可以達(dá)到 3G,32 位處理器理論上可以支持 2 的 32 次方(最大 4G),如上表所示,其中 1G 的地址給了 iROM、iRAM 等等這些 MPU 內(nèi)部寄存器使用,所以 32 位 MPU
是不可能達(dá)到 4G 內(nèi)存的。
現(xiàn)代操作系統(tǒng)普遍采用虛擬內(nèi)存管理(Virtual Memory Management)機(jī)制,這需要MMU(Memory Management Unit)的支持。MMU 通常是 CPU 的一部分,如果處理器沒有 MMU,或者有 MMU 但沒有啟用,CPU 執(zhí)行單元發(fā)出的內(nèi)存地址將直接傳到芯片引腳上,被內(nèi)存芯片(物理內(nèi)存)接收,這稱為物理地址(Physical Address),如果處理器啟用了 MMU,CPU 執(zhí)行單元發(fā)出的內(nèi)存地址將被 MMU 截獲,從 CPU 到 MMU 的地址稱為虛擬地址(Virtual Address),而 MMU 將這個(gè)地址翻譯成另一個(gè)地址發(fā)到 CPU 芯片的外部地址引腳上,也就是將虛擬地址映射成物理地址。通過內(nèi)存管理單元,可以實(shí)現(xiàn) 4G 的虛擬內(nèi)存。
在 uboot 代碼中,需要多次用到以上地址的概念,其中內(nèi)存管理單元被開啟或者關(guān)閉,所以有必要先介紹一下這幾個(gè)地址的概念。
3.1.2 關(guān)于匯編語法
如果學(xué)習(xí)過單片機(jī)課程,會(huì)發(fā)現(xiàn)大部分都是使用 C 語言去編碼,匯編使用的非常少了。那么還有必要去學(xué)習(xí)匯編么?其實(shí)是沒有必要的,因?yàn)樵?uboot 中匯編代碼量非常少,以4412 的 uboot 源碼為例,其中有效的匯編代碼不足 200 行,我們根本不需要為了讀懂 200行代碼專門去學(xué)習(xí)一門編程語言。
作者這里建議,首先我們的目標(biāo)是一定要把這些代碼讀明白,如果不明白會(huì)影響后面 C代碼的閱讀,以及 uboot 的移植;其次,我們要弄清楚每一行有效匯編代碼的語法。
現(xiàn)在我們已經(jīng)知道匯編是從“cpu/arm_cortexa9/start.S”這個(gè)文件開始執(zhí)行,那么我們就從第一行代碼的語法開始學(xué)習(xí),代碼執(zhí)行到或者跳到哪一行,我們就學(xué)習(xí)這一行代碼的語法。
在手冊(cè)的附錄部分,我們會(huì)依次介紹匯編代碼中出現(xiàn)的語法,大家也可以通過互聯(lián)網(wǎng)學(xué)習(xí)每一行執(zhí)行的匯編語法。
3.1.3 uboot 匯編代碼初始化串口之前的簡易調(diào)試方法
在前面教程中我們介紹過,從 A9 開始,開發(fā)板一般都不配 jtag,jtag 價(jià)格昂貴,在 A9之前,由于引導(dǎo)程序 uboot 必須通過 jtag 來燒寫,但是在 A9 處理器上,大部分都是支持 tf卡引導(dǎo),這樣可以免去 jtag 的費(fèi)用,燒寫變的簡單高效。
那么沒有 jtag,對(duì)于 uboot 的調(diào)試,我們沒法單步調(diào)試,如果有一行代碼我們不是很確定到底執(zhí)行了沒,或者跳到哪一行。如果代碼已經(jīng)執(zhí)行到串口初始化階段,當(dāng)然是可以通過串口打印字符來實(shí)現(xiàn),在串口初始化之前,其實(shí)可以通過控制 LED 燈來跟蹤代碼。
以下是開發(fā)板上兩個(gè)小燈控制的代碼,可以將小燈點(diǎn)亮。
點(diǎn)亮 LED2 燈:
ldr r0, =0x11000104 /* GPL2(0) */
ldr r1, =0x00000001 /* GPL2(0 output high) */
str r1, [r0]
ldr r0, =0x11000100 /* GPL2(0) */
ldr r1, =0x00000001 /* GPL2(0 output high) */
str r1, [r0]
點(diǎn)亮 LED3:
ldr r0, =0x11000060
ldr r1, =0x00000010
str r1, [r0]
ldr r0, =0x11000064
ldr r1, =0x00000002
str r1, [r0]
這里簡單介紹下這幾行匯編代碼的含義。
ldr r0, =0x11000104
ldr 是將 0x11000104 值賦給 r0 寄存器。這個(gè)值地址為 GPL2DAT。
ldr r1, =0x00000001
ldr 是取 0x11000104 地址的值賦給 r1 寄存器。
str r1, [r0]
str 是將 r1 的值寫入到 r0 數(shù)值對(duì)應(yīng)物理地址寄存器中。將 0x00000001 寫入到
0x11000104 地址寄存器中,0x11000104 地址是 GPL2DAT 寄存器。
ldr r0, =0x11000100 /* GPL2(0) */
ldr r1, =0x00000001 /* GPL2(0 output high) */
str r1, [r0]
將 0x00000001 寫入到 0x11000100 地址寄存器中,0x11000100 地址是 GPL2CON 寄存器。執(zhí)行這兩步就可以將 LED2 點(diǎn)亮。
點(diǎn)亮 LED3 和點(diǎn)亮 LED2 類似。
在串口初始化之前可以通過點(diǎn)燈來實(shí)現(xiàn)調(diào)試,串口初始化之后可以通過打印字符來跟蹤調(diào)試代碼。
上一篇:迅為IMX6ULL開發(fā)板-主頻和時(shí)鐘配置例程(二)
下一篇:Linux系統(tǒng)編程篇丨迅為IMX6ULL-對(duì)應(yīng)視頻講解
推薦閱讀最新更新時(shí)間:2025-05-28 05:15

 CE修改器
CE修改器 嵌入式系統(tǒng)技術(shù)與設(shè)計(jì)
嵌入式系統(tǒng)技術(shù)與設(shè)計(jì) 嵌入式硬件設(shè)計(jì)
嵌入式硬件設(shè)計(jì)設(shè)計(jì)資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問題解析

- Microchip 升級(jí)數(shù)字信號(hào)控制器(DSC)產(chǎn)品線 推出PWM 分辨率和 ADC 速度業(yè)界領(lǐng)先的新器件
- 意法半導(dǎo)體STM32MP23x:突破成本限制的工業(yè)AI應(yīng)用核心
- 意法半導(dǎo)體推出用于匹配遠(yuǎn)距離無線微控制器STM32WL33的集成的匹配濾波芯片
- ESP32開發(fā)板連接TFT顯示屏ST7789跳坑記
- 如何讓ESP32支持analogWrite函數(shù)
- LGVL配合FreeType為可變字體設(shè)置字重-ESP32篇
- 使用樹莓派進(jìn)行 ESP32 Jtag 調(diào)試
- ESP32怎么在SPIFFS里面存儲(chǔ)html,css,js文件,以及網(wǎng)頁和arduino的通訊
- ESP32 freeRTOS使用測試

- arduino esp8266開發(fā)板
- 【航順訓(xùn)練營】基于航順HKF030的學(xué)習(xí)板設(shè)計(jì)
- DC1299A-B,用于 LTC6421CUD-20 雙路匹配 1.3GHz 差分放大器/ADC 驅(qū)動(dòng)器的演示板
- NCV7429V1GEVB:NCV7429 系統(tǒng)基礎(chǔ)芯片評(píng)估板
- 使用 Analog Devices 的 LT1184FCS 的參考設(shè)計(jì)
- NCV78M09BDTRKG 9V可調(diào)輸出穩(wěn)壓器的典型應(yīng)用
- 【吉醫(yī)iCAN大賽】燈光品質(zhì)檢測
- AM6TW-2407DH35Z ±7.2V 6 瓦單輸出 DC-DC 轉(zhuǎn)換器的典型應(yīng)用
- 555_BJT-1811571124
- RDR-648 - 使用 HiperPFS-4 和 HiperLCS 的 150 W 功率因數(shù)校正 LLC 電源






- 上汽大眾:汽車網(wǎng)絡(luò)安全漏洞防護(hù)
- 恩智浦推出全新電池控制IC系列 助力新能源解決方案發(fā)展
- 全球首條GWh級(jí)新型固態(tài)電池生產(chǎn)線樣件下線
- 總投資455億元!三大動(dòng)力電池項(xiàng)目齊刷進(jìn)度條
- 現(xiàn)代汽車韓國建氫燃料電池廠,2028年投產(chǎn)
- 6月融資一覽:智能汽車芯片、第三代半導(dǎo)體、機(jī)器人成資本焦點(diǎn)
- 艙駕一體“點(diǎn)燃”新戰(zhàn)事
- 汽車智能化2.0引爆「萬億蛋糕」,誰在改寫游戲規(guī)則?
- 2025研華智能系統(tǒng)產(chǎn)業(yè)伙伴峰會(huì)成功舉辦
- 意法半導(dǎo)體公布2025年第二季度財(cái)報(bào)和電話會(huì)議時(shí)間安排







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)