方案特色: ARM Cortex-M0高性能電機驅(qū)動專用芯片 120/150度無傳感方波驅(qū)動 電機轉(zhuǎn)速可達100,000rpm (2極電機) 速度命令輸入可為模擬電壓或PWM信號 FG輸出 定轉(zhuǎn)速或恒功率運轉(zhuǎn) 水泵專屬特點: 空載時,以高轉(zhuǎn)速產(chǎn)生大吸力將水提上來 帶載時,以高扭矩滿足量程的要求

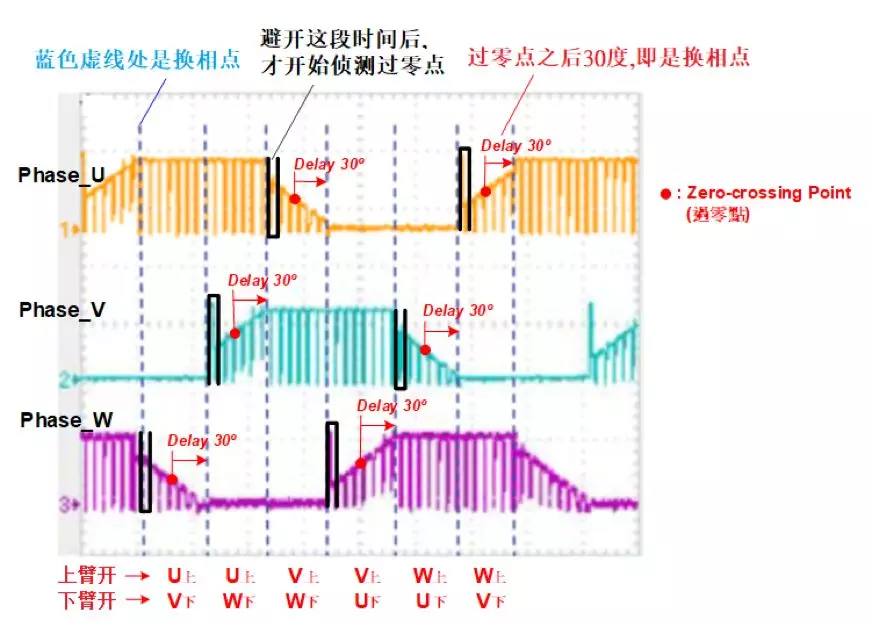
圖1. 左圖:常見的24V/13W小型水泵; 右圖:采用MM32SPIN05TW的驅(qū)動板 2. 無傳感方波驅(qū)動技術(shù)原理 在此介紹無傳感方波驅(qū)動的技術(shù)原理與實現(xiàn)方法。 相電壓與霍爾信號的對應關(guān)系 帶傳感器(霍爾組件)的方波驅(qū)動,MCU可藉由霍爾信號的變化取得轉(zhuǎn)子的位置以正確換相。當無霍爾組件時,該如何取得轉(zhuǎn)子的位置呢?觀察下圖之帶霍爾組件的方波驅(qū)動波形,換相點皆位于霍爾狀態(tài)改變之際,如藍色虛線所示.同時亦可發(fā)現(xiàn),在霍爾狀態(tài)維持不變的期間,必有一相"未被驅(qū)動"而慣性地轉(zhuǎn)動并呈現(xiàn)發(fā)電機狀態(tài),如紅色指標所示。這段"未被驅(qū)動"的期間極為有用,我們將利用它的電壓變化來取代霍爾組件的功能。 圖2. 相電壓與霍爾信號的對應關(guān)系 過零點偵測取代霍爾信號 本節(jié)要教大家如何利用這段"未被驅(qū)動"的慣性轉(zhuǎn)動區(qū)的電壓變化來取代霍爾組件的功能.請參考下圖,首先我們定義"Zero-crossing
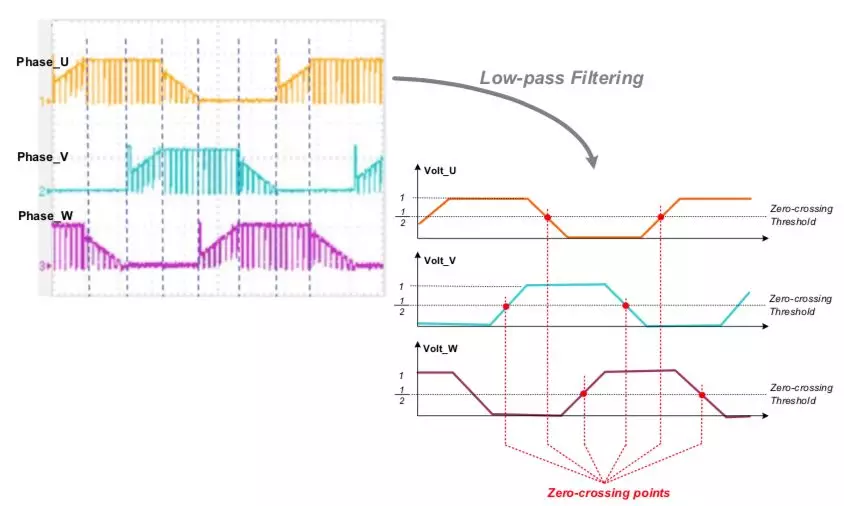
Point(過零點)",如紅點所示."過零點"這個名稱的由來是:該點位于某相"未被驅(qū)動"期間的正中央,相電流在它之前30度(換相前)與它之后30度(換相后)的流向是相反的。因此,若能偵測到該點的位置,則再延遲30度便是下一個換相點,這樣就可以取代了霍爾組件的功能了! 再觀察下圖,過零點所在位置的相電壓(PWM信號為High時),約略是DC_bus的1/2,我們可以使用MCU的ADC采樣功能來執(zhí)行這項偵測工作,下一節(jié)將說明具體的實現(xiàn)方法.注意:下圖ㄇ字型黑框的凹陷或凸起的相電壓變化,是因為換相瞬間的電流變化作用于電機的繞組所造成的(V=L*di/dt),必須避開后才可進行過零點偵測。 圖3. 過零點偵測取代霍爾信號 過零點偵測之實現(xiàn)方式 使用MCU的ADC來偵測過零點之前,必須先對相電壓做分壓,再經(jīng)過低通濾波以獲得位準低于5V的直流電壓.而判斷過零點的閾值,則設(shè)置為該直流電壓幅值的1/2.
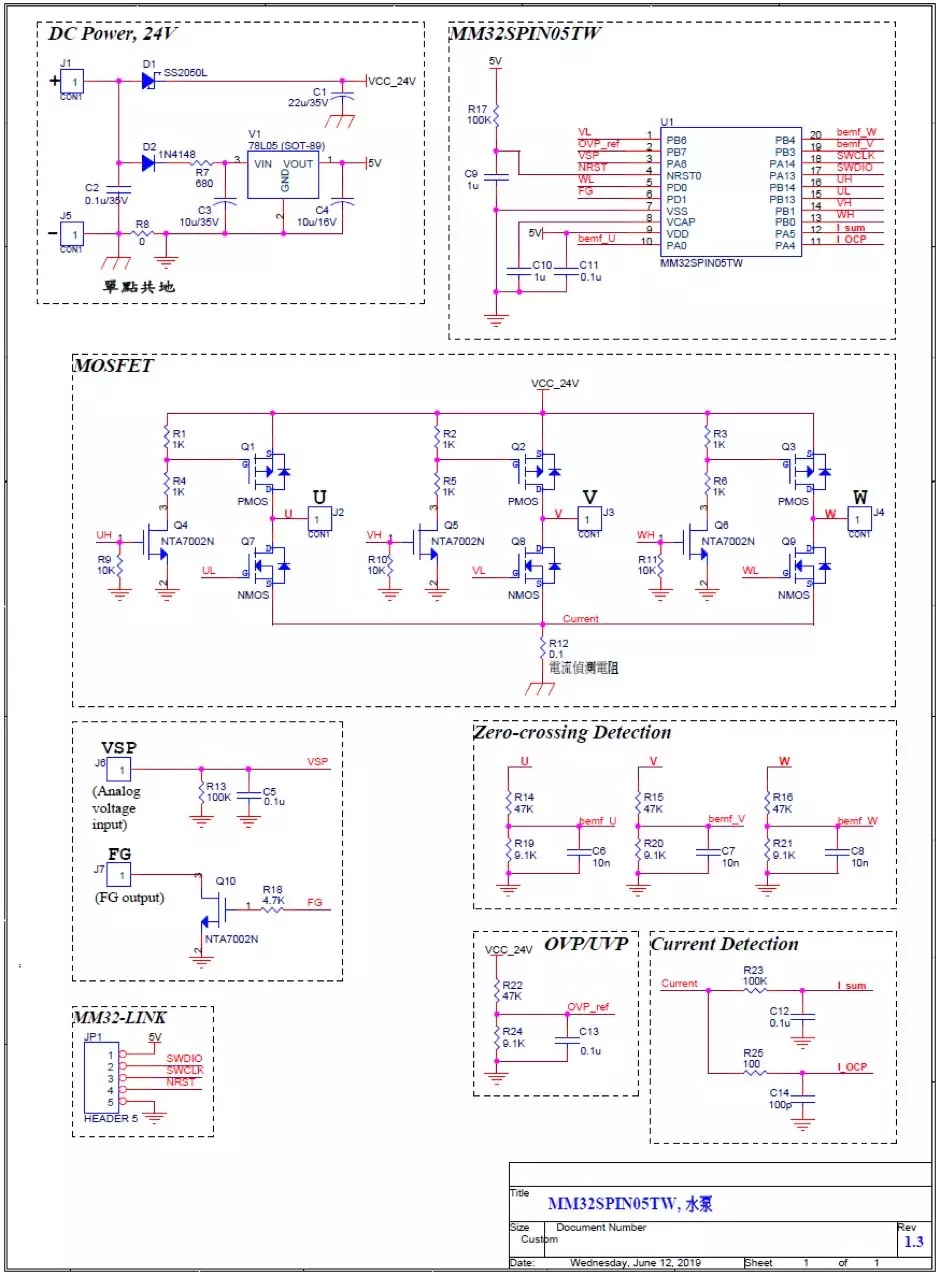
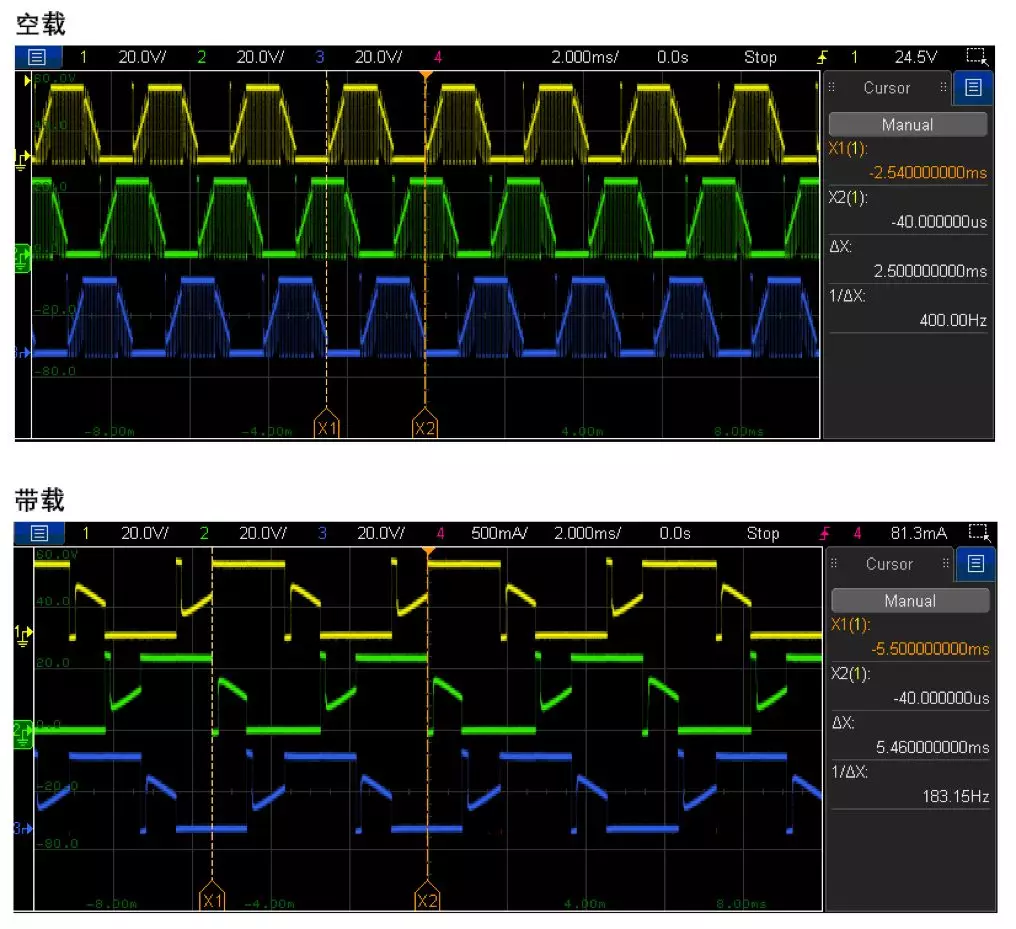
隨著電機轉(zhuǎn)速與負載的不同,該直流電壓的幅值是會改變的.因此,過零點的閾值也隨之在調(diào)整,這可由MCU實時采樣并計算而得.示意圖如下: 圖4. 過零點偵測之實現(xiàn)方式 3. 硬件設(shè)計 基于MM32SPIN05TW之無傳感方波驅(qū)動于"小型水泵"的電機驅(qū)動板參考原理圖如下: 圖5. 基于MM32SPIN05的中小功率水泵 電機驅(qū)動板原理圖 4. 電壓波形 本應用案例采用120度方波驅(qū)動,在空載和帶載時的相電壓波形如下: (轉(zhuǎn)速分別是12000rpm和5500rpm) 圖6. 空載和帶載時的相電壓波形 5. 結(jié)論 MM32SPIN05系列是靈動微電子推出的基本型高性能電機驅(qū)動專用芯片,能滿足大多數(shù)方波/弦波算法的需求.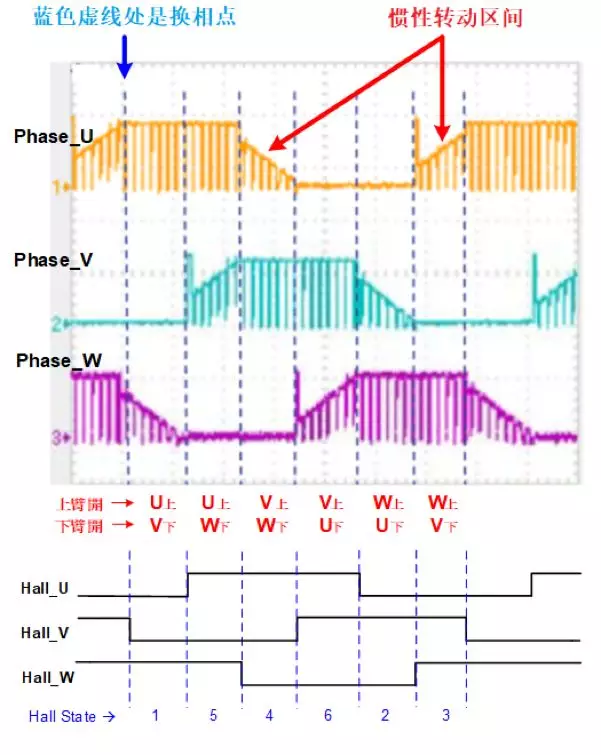

歡迎加入EEWorld參考設(shè)計群,也許能碰到搞同一個設(shè)計的小伙伴,群聊設(shè)計經(jīng)驗和難點。 入群方式:微信搜索“helloeeworld”或者掃描二維碼,備注:參考設(shè)計,即可被拉入群。 另外,如您在下載此設(shè)計遇到問題,也可以微信添加“helloeeworld”及時溝通。
EEWorld Datasheet 技術(shù)支持
EEWorld訂閱號

EEWorld服務號

汽車開發(fā)圈

機器人開發(fā)圈

About Us 關(guān)于我們 客戶服務 聯(lián)系方式 器件索引 網(wǎng)站地圖 最新更新 手機版 版權(quán)聲明


 北京市海淀區(qū)中關(guān)村大街18號B座15層1530室
電話:(010)82350740
郵編:100190
北京市海淀區(qū)中關(guān)村大街18號B座15層1530室
電話:(010)82350740
郵編:100190
 京公網(wǎng)安備 11010802033920號
Copyright ? 2005-2025 EEWORLD.com.cn, Inc. All rights reserved
京公網(wǎng)安備 11010802033920號
Copyright ? 2005-2025 EEWORLD.com.cn, Inc. All rights reserved


 ATSAM3S1CA-CU
ATSAM3S1CA-CU



